"膝关节生物力学设计及物理治疗新方法"
PDF格式 | 1.11MB |
更新于2025-01-16
| 153 浏览量 | 举报
计算设计与工程杂志,卷。号11(2014)55~66
www.jcde.org
表征膝关节物理治疗
Wangdo Kim
1
,António P.Veloso
1
、Duarte Araújo
1
和Sean
S.Kohles
2
,
*
1
Univ Lisboa
,
Fac Motricidade Humana
,
CIPER
,
LBMF
,
SPERTLAB
,
Estrada da Costa
,
P-1499-002
,
Lisboa
(里斯本),葡萄
牙
2
美国俄勒冈州波特兰市俄勒冈健康科学大学修复牙科系生物材料生物力学部
(2013年9月28日接收;2013年11月19日修订;2013年11月19日接受
摘要
膝关节的寿命取决于轴向对齐中如果只有一个部件异常离轴,生物力学系统就会失效,导致关节炎。膝关节各种失效的
复杂性导致骨科医生选择全膝关节置换术作为主要治疗方法。在许多情况下,这意味着牺牲大部分的其他正常关节.在这
里,我们回顾了新的计算方法来描述膝盖物理治疗,通过引入一个新的维度的脚负载的膝关节轴对齐产生改善的功能状
态的患者。在骨关节炎患者的治疗过程中,通过将足部负荷与膝关节的功能轴对齐,可以实现新的理疗应用
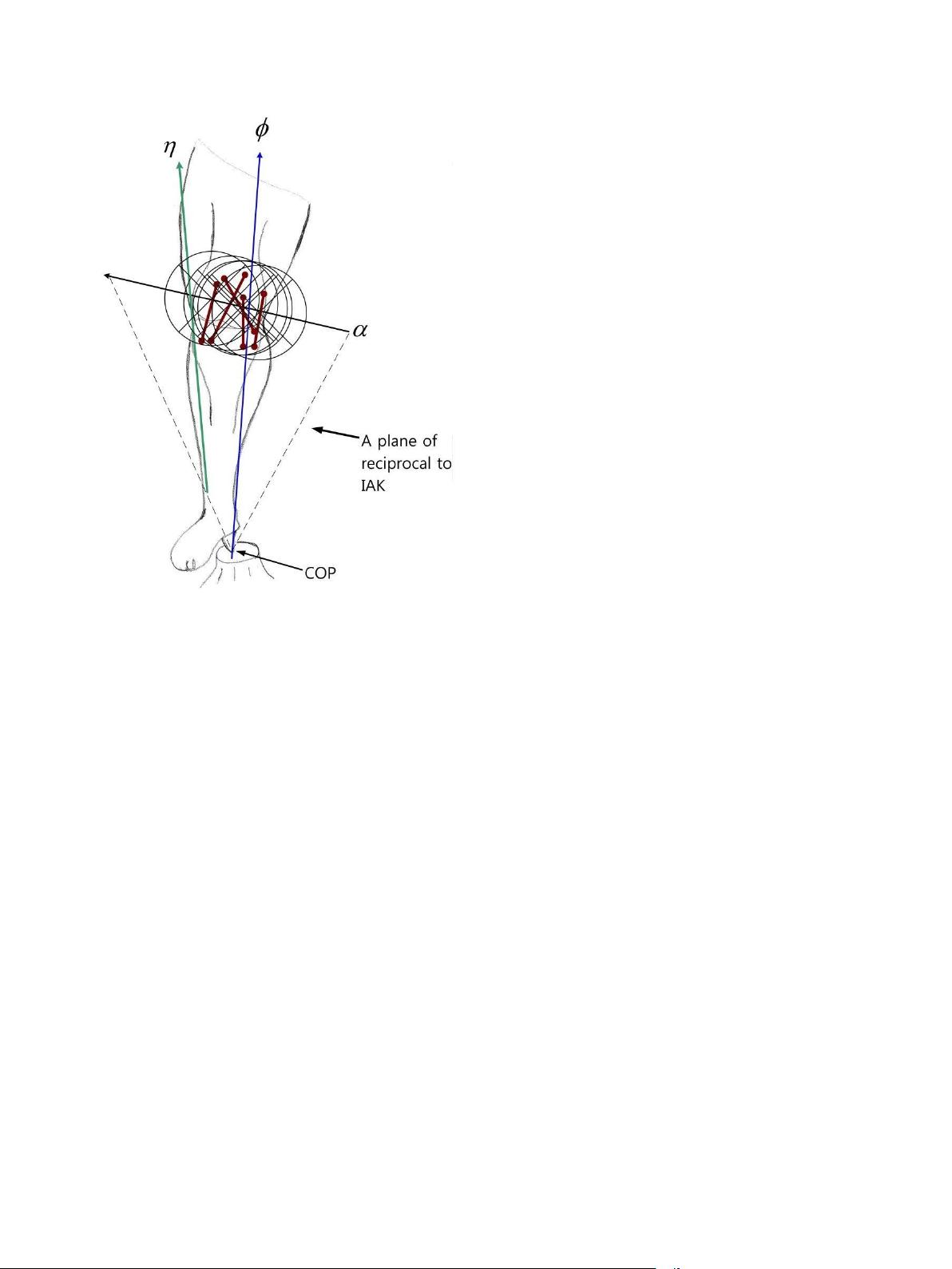
关键词
:膝关节瞬时轴(IAK);椭球坐标;知觉-动作耦合流形;吉布森
1.
介绍
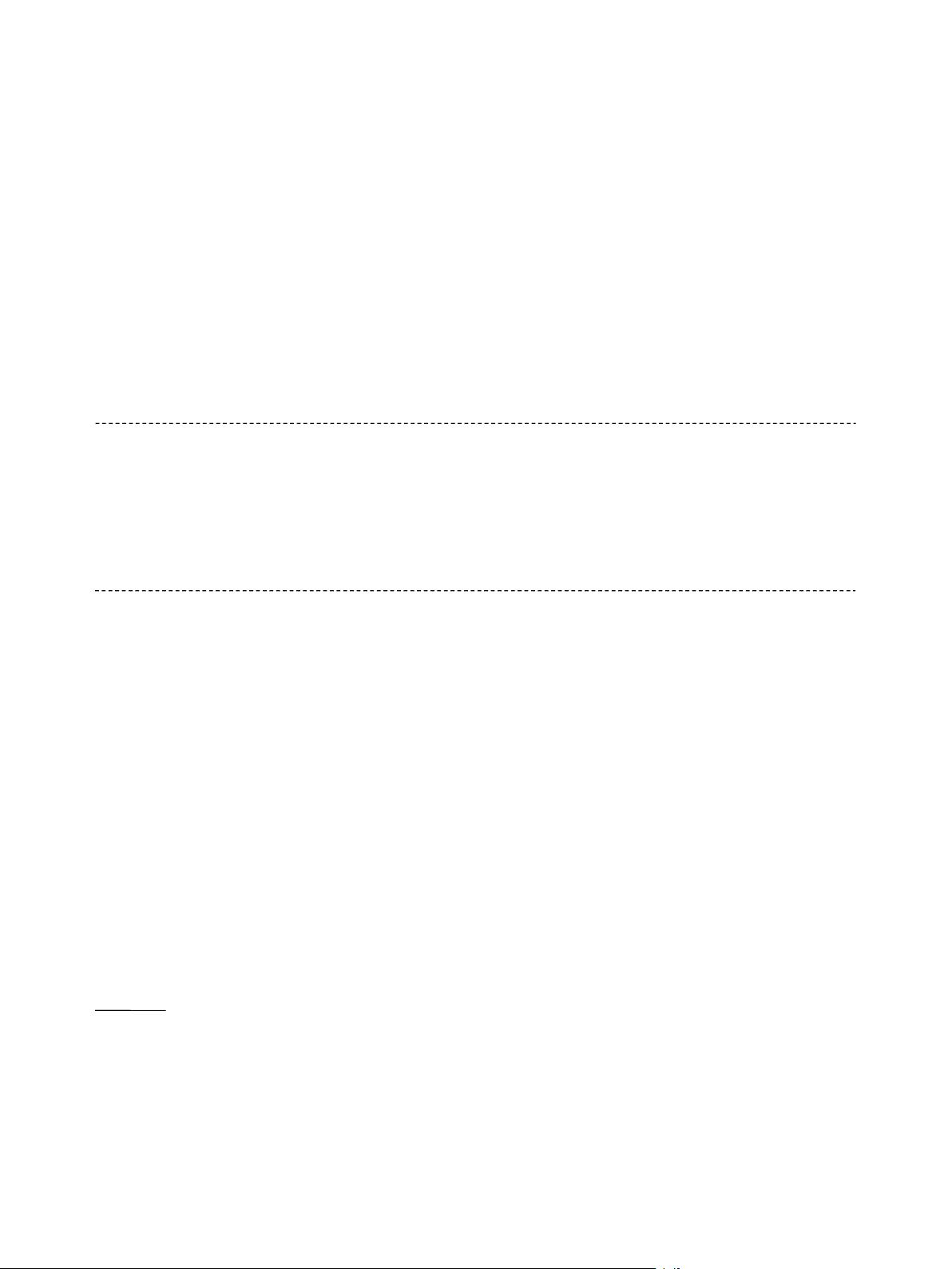
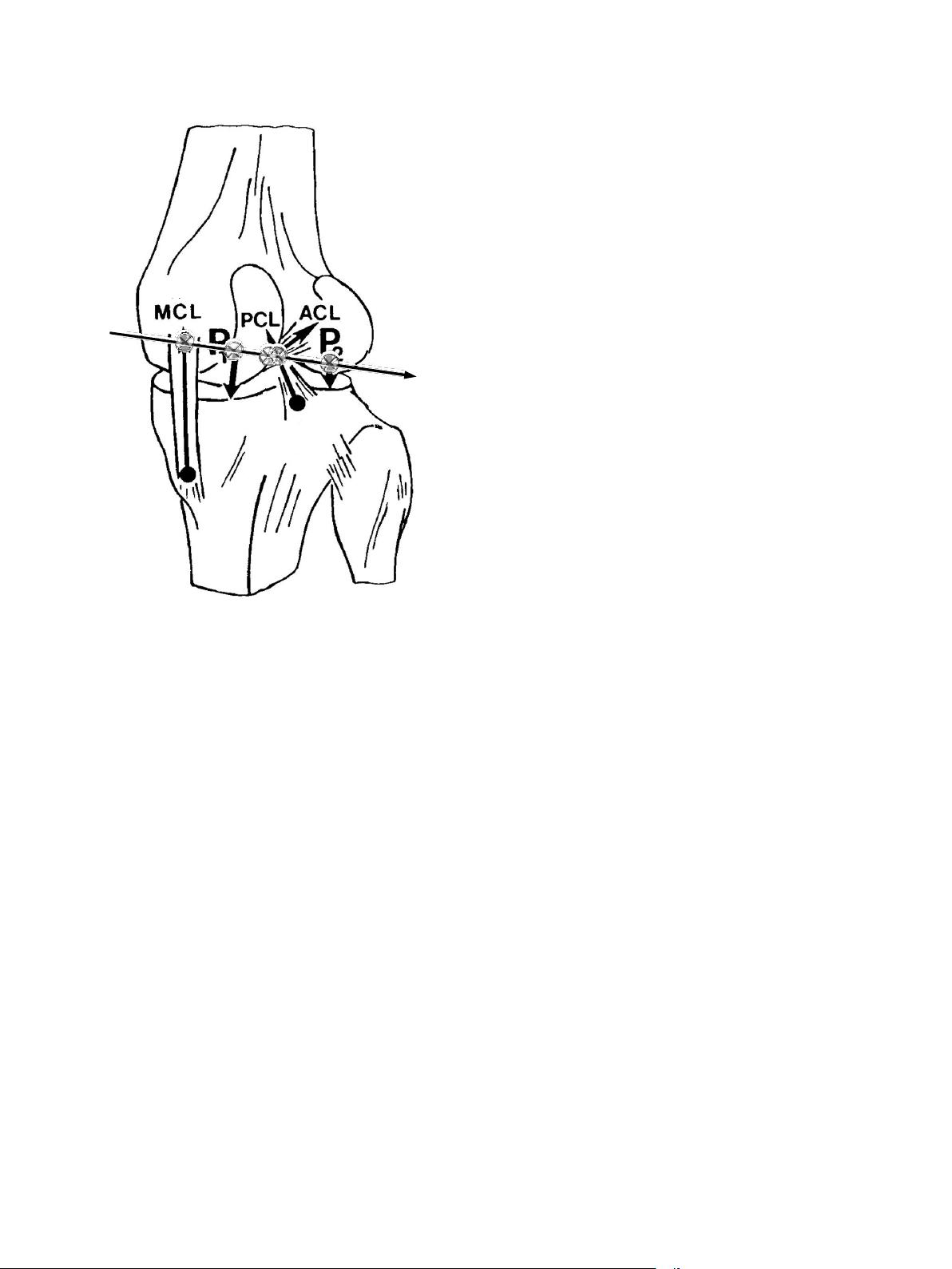
膝关节的寿命取决于五个生物力学变量的适当整
合:表面一致性,载荷分布,载荷过程中的如果特定
位置的某些功能变量异常,则生物力学系统失效,导
致关节炎。膝关节截骨术是一种骨科手术方法,通过
从股骨或胫骨打开或切割骨楔来重新对齐下肢。这可
能是比其他类型的膝关节置换手术更好的选择,特别
是对年轻人来说。然而,膝关节截骨术需要了解膝关
节的应力不平衡,确定异常步态周期,并正确切割骨
楔。这是一个困难的过程,可能会导致进一步的损坏
和/或功能受损。事实上,单独的膝关节截骨术可能无
法推广承重腿的大多数动作,如通过所有下肢关节到
交互表面的自适应移动所完成的。
虽然已经开发了一些基于计算机的手术模拟系统来
帮助外科医生进行膝关节手术[1],但所使用的膝关节
模型不是患者特定的[2],或者缺乏运动学和动力学信
息[3,4]。例如,创建受试者特定的模拟[5]膝关节模
型
从计算机断层扫描(CT)获得,而受试者特定的膝关
节运动学从透视图像获得。然后,使用胫骨额状面的
静态平衡,建模预测了不同行走试验的内侧和外侧胫
股接触力[6]。
对于患者特定的膝关节模型重建[2]、接触力计算或
可视化[7],没有有效的方法此外,没有系统集成接触
力模拟、步态周期模拟和虚拟膝关节物理治疗。在生
理学研究中使用的数学模型与应用于工程机械的模型
有很大的不同约束通常通过实际机械中的刚性连杆和
接头来实现。然而,大多数生理关节涉及滑动,因此
旋转中心是瞬时定义的。
很明显,人类运动可以从许多不同的角度来研究,
例如,解剖学的、生物学的、机械的等等。我们在这
里感兴趣的是骨骼活动的控制,具体地,步态的站立
阶段;当腿几乎完全伸展并且脚/脚与反作用表面接触
时。基于控制的方法的经典理论使用优化算法来微调
每个肌肉群的肌肉兴奋模式,并产生模拟实验数据的
协调良好的步行模式[8-10]。然而,为了减少神经系统
必须操作的自由度(DOF)的数量,我们采用了这样
的主张,即来自个体和环境的相互作用通过肌肉协同
作用或肌肉群来调节运动。
*
通讯作者。联系电话:
+1-503-516-7528
电
子邮件地址:Kohles@ohsu.edu
© 2014 CAD/CAM
工程师协会
Techno-Press doi
:
10.7315/JCDE. 2014. 006
剩余11页未读,继续阅读
相关推荐




cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- A7Demo.appstudio:探索JavaScript应用开发
- 百度地图范围内的标注点技术实现
- Foobar2000绿色汉化版:全面提升音频播放体验
- Rhythm Core .NET库:字符串与集合扩展方法详解
- 深入了解Tomcat源码及其依赖包结构
- 物流节约里程法的文档整理与实践分享
- NUnit3.vsix:快速安装NUnit三件套到VS2017及以上版本
- JQuery核心函数使用速查手册详解
- 多种风格的Select下拉框美化插件及其js代码下载
- Mac用户必备:SmartSVN版本控制工具介绍
- ELTE IK Web编程与Web开发课程内容详解
- QuartusII环境下的Verilog锁相环实现
- 横版过关游戏完整VC源码及资源包
- MVC后台管理框架2021版:源码与代码生成器详解
- 宗成庆主讲的自然语言理解课程PPT解析
- Memcached与Tomcat会话共享与Kryo序列化配置指南
