视觉SLAM算法进展:在AR、地图与导航中的应用探索
PDF格式 | 2.03MB |
更新于2025-01-16
| 23 浏览量 | 举报
"视觉SLAM算法及其在AR、地图、定位和寻路中的应用☆
视觉SLAM(Simultaneous Localization and Mapping,即同时定位与地图构建)算法是计算机视觉领域的一个关键技术,它利用摄像头捕获的图像数据来估计设备在未知环境中的位置,并重建周围环境的结构。在增强现实(AR)中,vSLAM扮演着至关重要的角色,通过精确的定位和环境映射,将虚拟元素无缝融合到真实世界中,为用户创造沉浸式的互动体验。
传统的SLAM系统常常依赖于GPS或激光雷达(LIDAR)等传感器,但视觉SLAM的优势在于相机的广泛可用性、成本效益以及丰富的环境信息获取能力。例如,颜色、纹理和外观等信息对于环境理解和场景重建至关重要。随着技术的发展,视觉SLAM已经应用于各种设备,包括人形机器人、无人机、自动驾驶汽车、月球车、水下机器人以及医疗设备如内窥镜。
视觉SLAM主要分为三类:单目、立体和RGB-D。单目SLAM仅依赖单个摄像头,而立体SLAM利用两台或更多摄像头来实现三维空间的定位。RGB-D SLAM则结合了彩色图像和深度信息,提供更为准确的三维重建。经典的vSLAM算法包括MonoSLAM、PTAM、PTAM-Dense、DTAM和ORB-SLAM等,但它们大多针对静态环境设计,对动态环境的适应性仍有待提高。
动态环境中的移动物体对SLAM系统的性能构成挑战,因为它们可能导致跟踪错误和定位不准。因此,研究者们一直在努力改进SLAM算法,使其能更好地处理动态场景中的运动物体。这涉及到目标检测、运动分割、建图策略等复杂问题的解决,以确保系统鲁棒性和精度。
在AR应用中,vSLAM不仅用于定位和映射,还涉及环境理解,例如识别地标、追踪用户视线和手势,以及在实时交互中保持虚拟对象的稳定。在地图制作中,SLAM可以创建高精度的室内地图,这对于导航和寻路系统至关重要,特别是在GPS信号无法覆盖的地方,如大型建筑物内部或地下区域。
近年来,随着深度学习技术的发展,视觉SLAM也逐渐融入了机器学习的元素,如使用神经网络进行特征提取和建图优化,以提高性能。同时,硬件的进步,如嵌入式计算平台和高性能摄像头,也为视觉SLAM的实时处理和高效运行提供了更强的支撑。
视觉SLAM算法在AR、地图、定位和寻路等领域展现出广阔的应用前景,但同时也面临着动态环境适应、计算效率和实时性等技术挑战。未来的研究将继续聚焦于这些问题的解决,以推动视觉SLAM技术的进一步发展和广泛应用。"
C. Theodorou
等人
阵列
15
(
2022
)
100222
3
++
因为PTAM、DTAM和LSD-SLAM可用于寻路。在可穿戴。
RNA [32]今天,有多种SLAM算法被实现,例如Saez提出的用于6-
DOF姿态估计(PE)的算法。
[33]通过使用RNA相机。视觉里程计(VO)算法[34]和基于熵的成本函
数用于确定相机的自运动(两个相机视图之间的姿态变化)。针对基于
立体视觉的可穿戴RNA位姿估计问题,提出了一种度量拓扑SLAM方法
(SLAM)。当从立体相机图像中提取特征并逐步跟踪时,该区域的局
部拓扑图和地图上的区域之间的全局拓扑关系被更新。立体相机不能提
供关于场景的完整深度信息,尽管这些RNA不能检测物体。可穿戴RNA
[35]依赖于RGB相机深度数据,因为它能够在特征稀疏的环境中提供更
可靠的深度数据。
为了
估计摄像机的姿态,使用了一种由于PL-SLAM
[37],可以实时估计相机姿态,它将跟踪和映射任务分离到两个单独的
线程中,并在双核计算机上处理它们。最近的SLAM方法对齐整个图
像,而不是匹配特征。然而,这些类型的方法通常不如用于估计姿态的
基于特征的SLAM方法准确。
3.
SLAM
算法
一般来说,Visual SLAM算法有三个基本模块:初始化[38],跟踪和
映射[39]。初始化包括定义要映射的环境的全局坐标系,以及其部分元
素的重建,其将用作跟踪和映射的开始的参考。这一步对于一些视觉
SLAM应用来说可能是相当具有挑战性的。本文的下一部分分为三类:
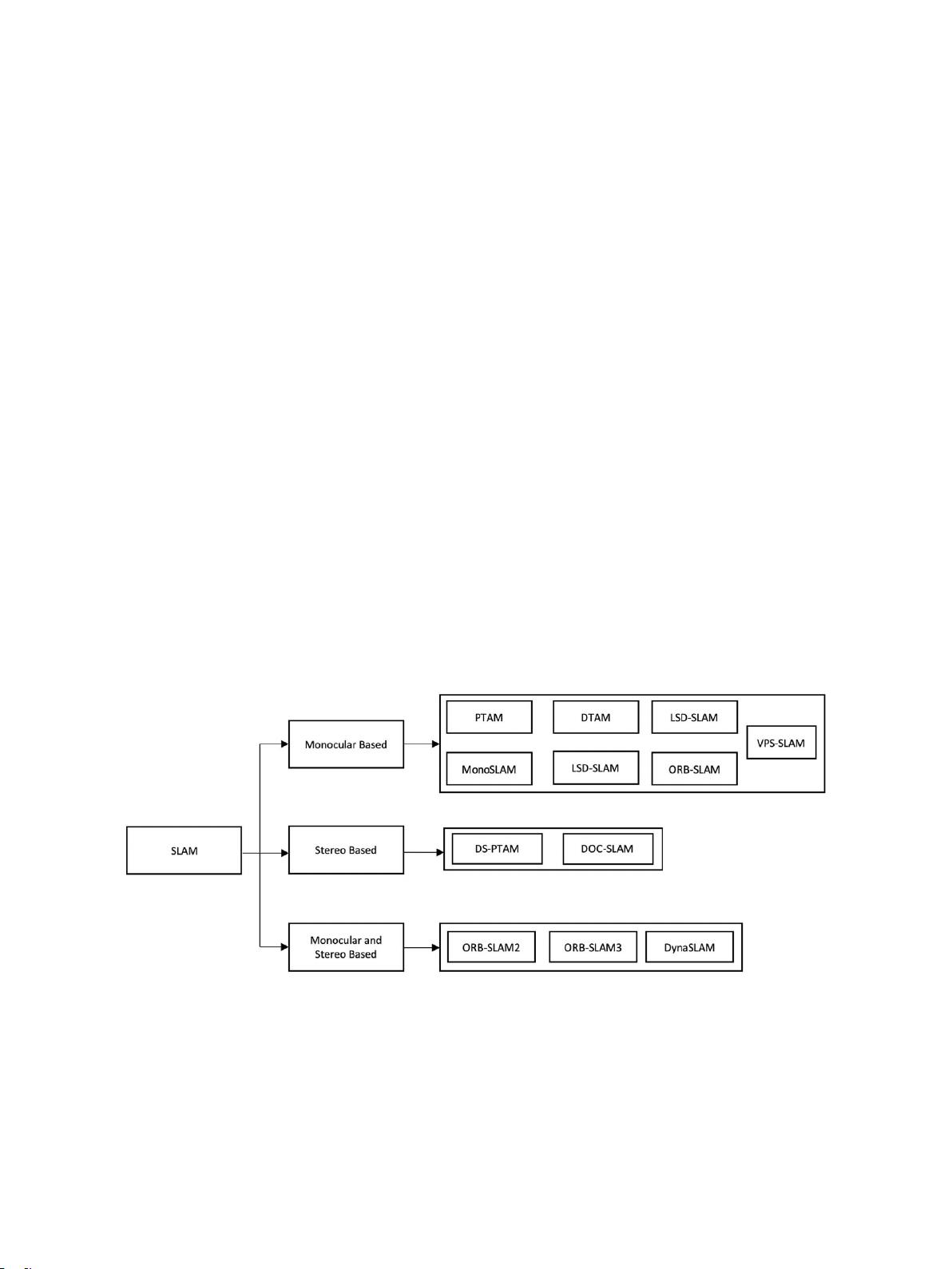
基于单眼的、立体聚焦的以及单眼和立体聚焦的vSLAM算法。详细地,
每种算法都描述了它的优点和缺点。
3.1.
基于单眼
单目SLAM是一种类型的SLAM,其专门依赖于由移动相机捕获的单
目图像序列以便执行映射、跟踪和寻路。单目图像序列通常是一组彼此
相似的图像
PTAM
。
手持相机可以在AR环境中通过并行跟踪和映射(PTAM)
在并行线程中,跟踪
和映射是分开处理的。第一个线程尝试跟踪手持设备的不稳定运动,而
另一方面,第二种方法基于先前的帧生成点特征的3D地图。制作了一张
详细的地图,上面有数千个地标。 在高帧速率下清晰可见,这种方法
在准确性和鲁棒性方面超越了基于模型的系统。在映射过程中,有两个
不同的阶段[9]。第一阶段涉及用立体技术创建初始地图。在跟踪系统将
关键帧(地图点)添加到地图后,地图绘制线程会细化并扩展图11。
二、
由手持摄像机捕获的视频图像用于
保持
摄像机相对于所构建的地图
的位置的实时估计
。
在估计视频帧之后,可以在其上增强图形。为了计
算最终姿态,系统在每帧中使用相同的过程。运动模型用于在相机每次
检测到新帧时从新帧生成姿态估计
。
帧的先前姿态
的
估计基于图像中的
粗尺度特征的检测来计算最终姿态估计。根据这些粗略匹配,更新相机
姿态,并估计整体姿态
PTAM是有利的,因为它将跟踪和映射分成两个单独的任务并并行处
理它们,从而允许通常与实时操作无关的批优化技术。该地图仅用作跟
踪摄像机的工具,这是PTAM的限制。虚拟实体应该能够与地图的几何
图形进行交互,所以它不应该是静态的
。
PTAM
也缺乏自动遮挡能力,这
意味着它不能在没有外界帮助的情况下跟踪对象.SLAM的另一个局限性
是它不是设计用于闭合大环路的。M-估计是一类广义极值估计,其中目
标函数是样本平均值。非线性最小二乘法和极大似然估计都是M-估计的
特例。跟踪器的M估计器不考虑特征图的不确定性,但这不影响AR应
用。
MonoSLAM
。
移动机 器人中第一个成 功 的 SLAM算法是 单目SLAM
(MonoSLAM)。通过在未知环境中沿着单目相机的轨迹快速移动,可
以将自然地标重建为3D地图,并且可以使用稀疏但持久的点来绘制城市
环境。在这种方法中,自然地标的地图是在概率框架中从稀疏但持久的
数据集在线创建的。MonoSLAM的一个基本方面是基于特征的地图,它
是相机 图图3显示了E X如何趋向卡尔曼。
过滤器在系统启动时持续更新地图,并持续到操作完成。摄像机的
运动和
Fig. 1.
Visual SLAM
算法的分类。
剩余13页未读,继续阅读
相关推荐


cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入解析JavaWeb中Servlet、Jsp与JDBC技术
- 粒子滤波在视频目标跟踪中的应用与MATLAB实现
- ISTQB ISEB基础级认证考试BH0-010题库解析
- 深入探讨HTML技术在hundeakademie中的应用
- Delphi实现EXE/DLL文件PE头修改技术
- 光线追踪:探索反射与折射模型的奥秘
- 构建http接口以返回json格式,使用SpringMVC+MyBatis+Oracle
- 文件驱动程序示例:实现缓存区读写操作
- JavaScript顶盒技术开发与应用
- 掌握PLSQL: 从语法到数据库对象的全面解析
- MP4v2在iOS平台上的应用与编译指南
- 探索Chrome与Google Cardboard的WebGL基础VR实验
- Windows平台下的IOMeter性能测试工具使用指南
- 激光切割板材表面质量研究综述
- 西门子200编程电缆PPI驱动程序下载及使用指南
- Pablo的编程笔记与机器学习项目探索
