GraphSLAM算法在大规模地图构建中的应用
需积分: 28 170 浏览量
更新于2024-07-17
收藏 513KB PDF 举报
"图优化SLAM算法在大规模城市结构映射中的应用"
本文主要介绍了一种用于离线SLAM问题的统一算法——GraphSLAM。SLAM(Simultaneous Localization And Mapping,同时定位与建图)是机器人导航和自动化领域的重要问题,旨在让机器人在未知环境中既能定位自身位置,又能构建环境地图。GraphSLAM算法与近年来将优化技术应用于SLAM问题的研究紧密相关,它将SLAM后验概率转化为一个图形网络,该网络表示数据的对数似然性。
GraphSLAM算法的核心步骤是将这个图形网络通过变量消除技术进行简化,从而得到一个低维度的问题,然后使用传统的优化方法求解。这种方法使得GraphSLAM能够在包含超过108个特征的地图上进行建图。此外,文章还讨论了一种贪心算法用于数据关联,即如何有效地将传感器观测到的数据与已知地图特征匹配。
关键词:SLAM,机器人导航,定位,建图
1. 引言
近年来,许多项目致力于使用移动传感器平台对物理环境进行测绘。早期的工作主要集中在航空测绘,但随着机器人技术的发展,SLAM已经成为地面机器人和无人机自主导航的关键技术。
2. 图优化SLAM算法
GraphSLAM算法将SLAM问题转化为图优化问题,其中节点代表地图中的地标或机器人的位置,边则表示这些位置之间的关系和观测数据。通过最小化图中所有边的残差,可以找到最佳的节点配置,即最优的机器人轨迹和地图估计。
3. 变量消除与优化
变量消除技术用于减少问题的复杂性,例如通过因子分解来删除冗余信息。优化过程通常采用非线性优化方法,如Levenberg-Marquardt算法,以解决求解过程中可能出现的局部最小值问题。
4. 数据关联与贪婪算法
在SLAM中,数据关联是关键挑战之一,因为传感器观测可能对应多个地图特征。贪婪算法提供了一种有效策略,每次选择最有可能的匹配,逐步建立观测和特征之间的对应关系。
5. 应用与实验结果
文章展示了在城市环境中进行SLAM的实验,其中机器人可能偶尔接收到来自GPS的测量信息。实验结果证明了GraphSLAM在大规模环境中构建精确地图的能力,并且在有GPS辅助时能显著提高定位精度。
6. 结论与未来工作
GraphSLAM为大规模SLAM问题提供了一种实用的解决方案,但仍然面临数据关联的挑战以及在动态环境中的鲁棒性问题。未来的研究可能会探索更复杂的优化策略和实时性能的提升。
通过理解GraphSLAM算法,读者可以深入了解如何将优化理论应用于SLAM问题,这对于机器人导航、自动驾驶汽车和无人机系统的设计至关重要。
408 THE INTERNATIONAL JOURNAL OF ROBOTICS RESEARCH / May–June 2006
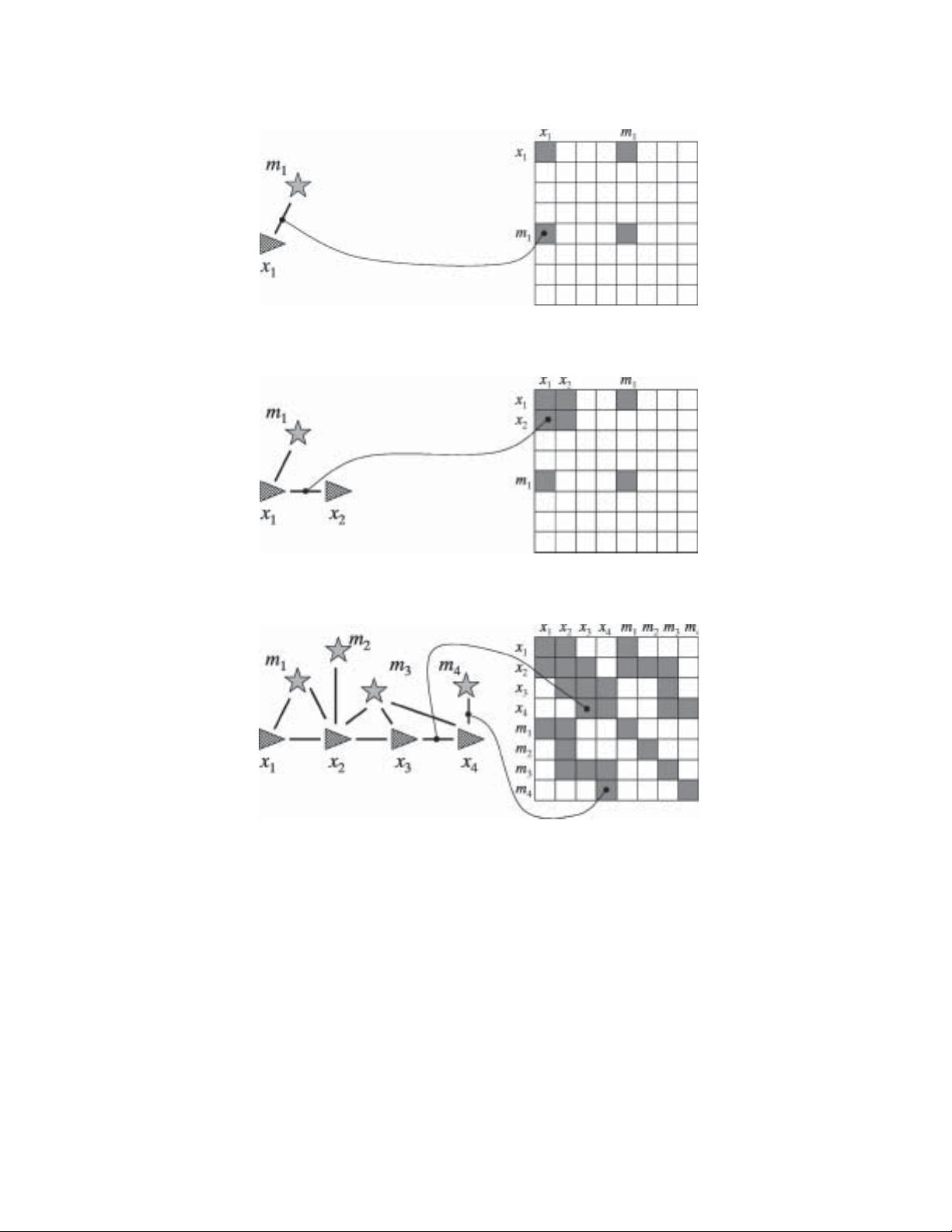
(a) Observation ls landmark m
1
(b) Robot motion from x
1
to x
2
(c) Several steps later
Fig. 2. Illustration of the acquisition of the information matrix in GraphSLAM. The left diagram shows the dependence graph,
the right the information matrix.
The GraphSLAM algorithm now employs an important
factorization trick, which we can think of as propagating in-
formation trough the information matrix (in fact, it is a gen-
eralization of the well-known variable elimination algorithm
for matrix inversion). Suppose we would like to remove a fea-
ture m
j
from the information matrix and the information
state ξ. In our spring mass model, this is equivalent to remov-
ing the node and all springs attached to this node. As we shall
see below, this is possible by a remarkably simple operation:
we can remove all those springs between m
j
and the poses at
which m
j
was observed, by introducing new springs between
any pair of such poses.
This process is illustrated in Figure 3, which shows the
removal of two map features, m
1
and m
3
(the removal of m
2
and m
4
is trivial in this example). In both cases, the feature
removal modifies the link between any pair of poses from
which a feature was originally observed.As illustrated in Fig-
ure 3(b), this operation may lead to the introduction of new
剩余26页未读,继续阅读
2021-06-11 上传
2012-02-20 上传
2019-10-23 上传
2023-03-21 上传
2023-03-30 上传
2023-06-06 上传
2024-01-05 上传
2023-08-06 上传
2023-05-27 上传
2023-06-07 上传

白茶-清欢
- 粉丝: 1w+
- 资源: 33
 我的内容管理
展开
我的内容管理
展开







最新资源
- 多模态联合稀疏表示在视频目标跟踪中的应用
- Kubernetes资源管控与Gardener开源软件实践解析
- MPI集群监控与负载平衡策略
- 自动化PHP安全漏洞检测:静态代码分析与数据流方法
- 青苔数据CEO程永:技术生态与阿里云开放创新
- 制造业转型: HyperX引领企业上云策略
- 赵维五分享:航空工业电子采购上云实战与运维策略
- 单片机控制的LED点阵显示屏设计及其实现
- 驻云科技李俊涛:AI驱动的云上服务新趋势与挑战
- 6LoWPAN物联网边界路由器:设计与实现
- 猩便利工程师仲小玉:Terraform云资源管理最佳实践与团队协作
- 类差分度改进的互信息特征选择提升文本分类性能
- VERITAS与阿里云合作的混合云转型与数据保护方案
- 云制造中的生产线仿真模型设计与虚拟化研究
- 汪洋在PostgresChina2018分享:高可用 PostgreSQL 工具与架构设计
- 2018 PostgresChina大会:阿里云时空引擎Ganos在PostgreSQL中的创新应用与多模型存储
