py支持向量机时间序列
时间: 2023-10-18 13:03:18 浏览: 133
Python中的支持向量机(Support Vector Machine,简称SVM)是一种基于统计学习理论的监督学习算法。它是一种二分类模型,但也可以用于多分类任务。
SVM在时间序列分析中表现出色,并且在解决时间序列预测和分类问题上有广泛的应用。
首先,SVM可以处理非线性关系。在时间序列中,往往存在非线性的关联,SVM通过使用各种核函数(如线性核、径向基函数等)来将数据映射到高维空间,从而能够更好地捕捉到非线性关系,提高预测的精度和准确性。
其次,SVM在处理小样本和噪声数据方面具有较好的鲁棒性。在时间序列分析中,样本数量有限且往往存在噪声,而SVM通过选择支持向量作为决策边界的关键点,从而有效地避免了对个别数据点的过度依赖,减小了对噪声数据的影响,提高了模型的鲁棒性。
此外,SVM还可以通过调整惩罚参数、核函数以及参数优化策略等来进一步提升模型的性能。例如,通过合理设置惩罚参数C的值,能够控制模型的复杂度和泛化能力;选择合适的核函数,能够将数据映射到高维空间,提高模型的拟合能力;使用交叉验证等技术,可以选择最优的参数组合。
总而言之,SVM在时间序列分析中的应用是有效的,它能够处理非线性关系、具有较好的鲁棒性,同时也可以通过参数调优进一步提高模型性能。然而,在实际应用过程中,我们还需结合具体问题和数据特征来选择合适的核函数和参数设置,以达到更好的预测和分类效果。
相关问题
var向量自回归模型py
var向量自回归模型(VAR)是一种多变量时间序列分析方法,用于研究多个变量之间的动态关系和互相影响。在Python中,我们可以使用statsmodels库来实现VAR模型的建立和分析。
要使用VAR模型,我们首先需要安装statsmodels库。然后,我们可以使用该库中的VAR类来创建VAR模型对象,并使用该对象进行模型拟合和预测。
首先,我们需要导入必要的库:
```python
import pandas as pd
import numpy as np
from statsmodels.tsa.api import VAR
```
然后,我们可以准备我们的数据。数据应该是一个包含多个变量的时间序列数据框(dataframe),其中每一列代表一个变量,每一行代表一个时间点的观测值。
接下来,我们可以创建VAR模型对象,并对模型进行拟合:
```python
model = VAR(data)
results = model.fit()
```
一旦模型拟合完成,我们可以使用该模型进行预测:
```python
lag_order = results.k_ar
forecast = results.forecast(data.values[-lag_order:], steps=1)
```
最后,我们可以使用模型的结果进行分析和解释,例如查看模型的系数、残差等。
总之,通过使用Python中的statsmodels库,我们能够很方便地建立和分析VAR向量自回归模型,从而更好地理解多变量时间序列数据之间的动态关系。
时间序列预测模型工公式latex
时间序列预测模型是用来预测未来时间点上的数值或趋势的一种模型。其中,常用的时间序列预测模型包括ARIMA模型、VAR模型、LSTM模型等。
1. ARIMA模型(自回归移动平均模型):
ARIMA模型是一种常用的线性时间序列预测模型,其公式可以表示为:
\[Y_t = c + \phi_1Y_{t-1} + \phi_2Y_{t-2} + \ldots + \phi_pY_{t-p} + \theta_1\varepsilon_{t-1} + \theta_2\varepsilon_{t-2} + \ldots + \theta_q\varepsilon_{t-q} + \varepsilon_t\]
其中,\(Y_t\)表示时间点\(t\)上的观测值,\(c\)表示常数项,\(\phi_i\)表示自回归系数,\(\theta_i\)表示移动平均系数,\(\varepsilon_t\)表示误差项。
2. VAR模型(向量自回归模型):
VAR模型是一种多变量时间序列预测模型,其公式可以表示为:
\[Y_t = c + A_1Y_{t-1} + A_2Y_{t-2} + \ldots + A_pY_{t-p} + \varepsilon_t\]
其中,\(Y_t\)表示时间点\(t\)上的多个变量的观测值,\(c\)表示常数项,\(A_i\)表示系数矩阵,\(\varepsilon_t\)表示误差项。
3. LSTM模型(长短期记忆模型):
LSTM模型是一种递归神经网络模型,用于处理时间序列数据。其公式可以表示为:
\[h_t = f(W_{ih}x_t + W_{hh}h_{t-1} + b_h)\]
\[y_t = g(W_{hy}h_t + b_y)\]
其中,\(x_t\)表示时间点\(t\)上的输入,\(h_t\)表示隐藏状态,\(W_{ih}\)、\(W_{hh}\)、\(W_{hy}\)分别表示输入到隐藏状态、隐藏状态到隐藏状态、隐藏状态到输出的权重矩阵,\(b_h\)、\(b_y\)分别表示隐藏状态和输出的偏置项,\(f\)、\(g\)表示激活函数。
阅读全文
相关推荐
大家在看
yolo开发人工智能小程序经验和总结.zip
yolo开发人工智能小程序经验和总结.zipyolo开发人工智能小程序经验和总结.zipyolo开发人工智能小程序经验和总结.zipyolo开发人工智能小程序经验和总结.zip
USB_HUB硬件电路引脚原理解析.docx
USB_HUB硬件电路引脚原理解析,与个人博文一致,这是word版本。
USB_HUB硬件电路引脚原理解析,与个人博文一致,这是word版本。
Keysight N6705C直流电源分析仪.pdf
Keysight N6705C直流电源分析仪
AS400 自学笔记集锦
AS400 自学笔记集锦
AS400学习笔记(V1.2)
自学使用的400操作命令集锦
LQR与PD控制在柔性机械臂中的对比研究
LQR与PD控制在柔性机械臂中的对比研究,路恩,杨雪锋,针对单杆柔性机械臂末端位置控制的问题,本文对柔性机械臂振动主动控制中较为常见的LQR和PD方法进行了控制效果的对比研究。首先,�
最新推荐
详解用Python进行时间序列预测的7种方法
使用神经网络、支持向量机、随机森林等机器学习算法也可以进行时间序列预测。这些方法通常需要大量的特征工程,包括提取时间序列的统计特性,如趋势、周期性、自相关等,然后将它们输入到模型中进行训练。 在实际...
pytorch下使用LSTM神经网络写诗实例
在`data.py`中,处理唐诗数据的步骤包括数据预处理,如分词、构建词汇表(词索引映射)和将诗词序列化为固定长度的向量。数据集可能包含数万首唐诗,用于训练模型。这些诗词被转换成词序列,每个词对应一个整数索引...
3dsmax高效建模插件Rappatools3.3发布,附教程
资源摘要信息:"Rappatools3.3.rar是一个与3dsmax软件相关的压缩文件包,包含了该软件的一个插件版本,名为Rappatools 3.3。3dsmax是Autodesk公司开发的一款专业的3D建模、动画和渲染软件,广泛应用于游戏开发、电影制作、建筑可视化和工业设计等领域。Rappatools作为一个插件,为3dsmax提供了额外的功能和工具,旨在提高用户的建模效率和质量。"
知识点详细说明如下:
1. 3dsmax介绍:
3dsmax,又称3D Studio Max,是一款功能强大的3D建模、动画和渲染软件。它支持多种工作流程,包括角色动画、粒子系统、环境效果、渲染等。3dsmax的用户界面灵活,拥有广泛的第三方插件生态系统,这使得它成为3D领域中的一个行业标准工具。
2. Rappatools插件功能:
Rappatools插件专门设计用来增强3dsmax在多边形建模方面的功能。多边形建模是3D建模中的一种技术,通过添加、移动、删除和修改多边形来创建三维模型。Rappatools提供了大量高效的工具和功能,能够帮助用户简化复杂的建模过程,提高模型的质量和完成速度。
3. 提升建模效率:
Rappatools插件中可能包含诸如自动网格平滑、网格优化、拓扑编辑、表面细分、UV展开等高级功能。这些功能可以减少用户进行重复性操作的时间,加快模型的迭代速度,让设计师有更多时间专注于创意和细节的完善。
4. 压缩文件内容解析:
本资源包是一个压缩文件,其中包含了安装和使用Rappatools插件所需的所有文件。具体文件内容包括:
- index.html:可能是插件的安装指南或用户手册,提供安装步骤和使用说明。
- license.txt:说明了Rappatools插件的使用许可信息,包括用户权利、限制和认证过程。
- img文件夹:包含用于文档或界面的图像资源。
- js文件夹:可能包含JavaScript文件,用于网页交互或安装程序。
- css文件夹:可能包含层叠样式表文件,用于定义网页或界面的样式。
5. MAX插件概念:
MAX插件指的是专为3dsmax设计的扩展软件包,它们可以扩展3dsmax的功能,为用户带来更多方便和高效的工作方式。Rappatools属于这类插件,通过在3dsmax软件内嵌入更多专业工具来提升工作效率。
6. Poly插件和3dmax的关系:
在3D建模领域,Poly(多边形)是构建3D模型的主要元素。所谓的Poly插件,就是指那些能够提供额外多边形建模工具和功能的插件。3dsmax本身就支持强大的多边形建模功能,而Poly插件进一步扩展了这些功能,为3dsmax用户提供了更多创建复杂模型的方法。
7. 增强插件的重要性:
在3D建模和设计行业中,增强插件对于提高工作效率和作品质量起着至关重要的作用。随着技术的不断发展和客户对视觉效果要求的提高,插件能够帮助设计师更快地完成项目,同时保持较高的创意和技术水准。
综上所述,Rappatools3.3.rar资源包对于3dsmax用户来说是一个很有价值的工具,它能够帮助用户在进行复杂的3D建模时提升效率并得到更好的模型质量。通过使用这个插件,用户可以在保持工作流程的一致性的同时,利用额外的工具集来优化他们的设计工作。
【R-Studio技术路径】:从RAID 5数据恢复基础到高级操作
# 摘要
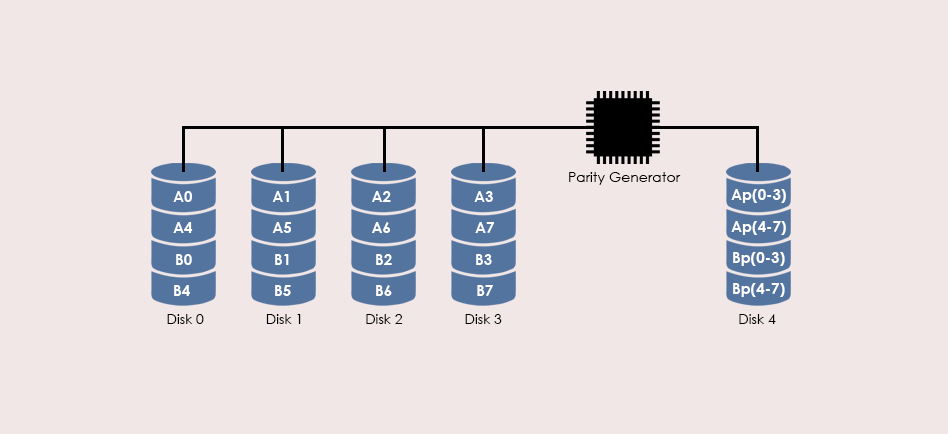
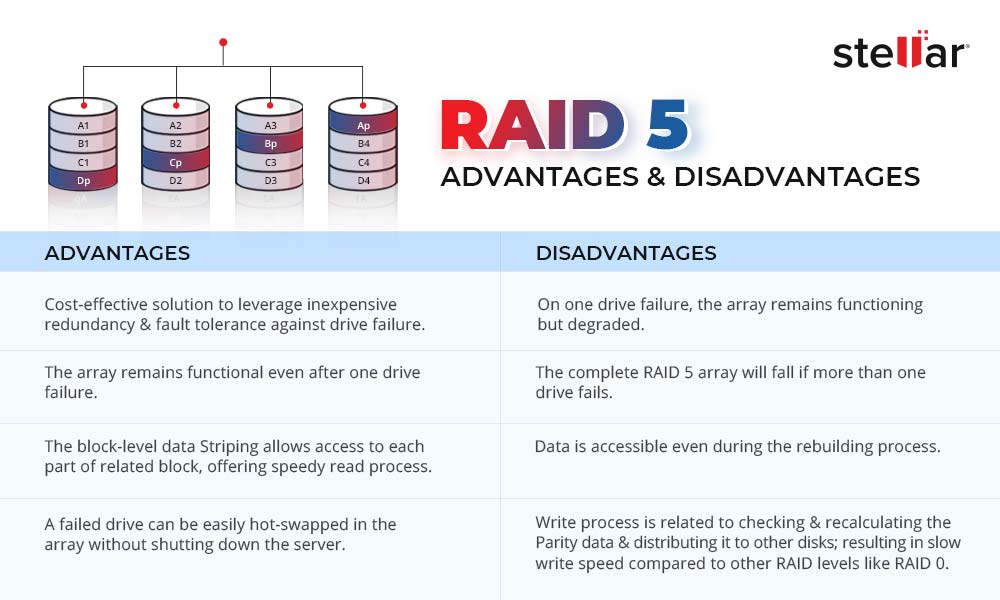
随着信息技术的发展,数据丢失问题日益突出,RAID 5作为常见的数据存储解决方案,其数据恢复技术显得尤为重要。本文首先介绍了RAID 5数据恢复的基础知识,然后详细解析了R-Studio软件的界面和核心功能,重点探讨了其在RAID 5数据恢复中的应用实践,包括磁盘镜像创建、数据提取、数据重组策略及一致性验证。进一步,本文还涉及了R-Studio的进阶技术,如脚本编
``` 定义1个圆类,成员有:1个半径成员变量,1个构造方法给成员变量赋初值,1个求面积方法。```定义1个圆类,成员有:1个半径成员变量,1个构造方法给成员变量赋初值,1个求面积方法。
当然,我们可以定义一个简单的`Circle`类,如下所示:
```java
public class Circle {
// 定义一个私有的半径成员变量
private double radius;
// 构造方法,用于初始化半径
public Circle(double initialRadius) {
this.radius = initialRadius;
}
// 求圆面积的方法
public double getArea() {
return Math.PI * Math.pow(radiu
Ruby实现PointInPolygon算法:判断点是否在多边形内
资源摘要信息:"PointInPolygon算法的Ruby实现是一个用于判断点是否在多边形内部的库。该算法通过计算点与多边形边界交叉线段的交叉次数来判断点是否在多边形内部。如果交叉数为奇数,则点在多边形内部,如果为偶数或零,则点在多边形外部。库中包含Pinp::Point类和Pinp::Polygon类。Pinp::Point类用于表示点,Pinp::Polygon类用于表示多边形。用户可以向Pinp::Polygon中添加点来构造多边形,然后使用contains_point?方法来判断任意一个Pinp::Point对象是否在该多边形内部。"
1. Ruby语言基础:Ruby是一种动态、反射、面向对象、解释型的编程语言。它具有简洁、灵活的语法,使得编写程序变得简单高效。Ruby语言广泛用于Web开发,尤其是Ruby on Rails这一著名的Web开发框架就是基于Ruby语言构建的。
2. 类和对象:在Ruby中,一切皆对象,所有对象都属于某个类,类是对象的蓝图。Ruby支持面向对象编程范式,允许程序设计者定义类以及对象的创建和使用。
3. 算法实现细节:算法基于数学原理,即计算点与多边形边界线段的交叉次数。当点位于多边形内时,从该点出发绘制射线与多边形边界相交的次数为奇数;如果点在多边形外,交叉次数为偶数或零。
4. Pinp::Point类:这是一个表示二维空间中的点的类。类的实例化需要提供两个参数,通常是点的x和y坐标。
5. Pinp::Polygon类:这是一个表示多边形的类,由若干个Pinp::Point类的实例构成。可以使用points方法添加点到多边形中。
6. contains_point?方法:属于Pinp::Polygon类的一个方法,它接受一个Pinp::Point类的实例作为参数,返回一个布尔值,表示传入的点是否在多边形内部。
7. 模块和命名空间:在Ruby中,Pinp是一个模块,模块可以用来将代码组织到不同的命名空间中,从而避免变量名和方法名冲突。
8. 程序示例和测试:Ruby程序通常包含方法调用、实例化对象等操作。示例代码提供了如何使用PointInPolygon算法进行点包含性测试的基本用法。
9. 边缘情况处理:算法描述中提到要添加选项测试点是否位于多边形的任何边缘。这表明算法可能需要处理点恰好位于多边形边界的情况,这类点在数学上可以被认为是既在多边形内部,又在多边形外部。
10. 文件结构和工程管理:提供的信息表明有一个名为"PointInPolygon-master"的压缩包文件,表明这可能是GitHub等平台上的一个开源项目仓库,用于管理PointInPolygon算法的Ruby实现代码。文件名称通常反映了项目的版本管理,"master"通常指的是项目的主分支,代表稳定版本。
11. 扩展和维护:算法库像PointInPolygon这类可能需要不断维护和扩展以适应新的需求或修复发现的错误。开发者会根据实际应用场景不断优化算法,同时也会有社区贡献者参与改进。
12. 社区和开源:Ruby的开源生态非常丰富,Ruby开发者社区非常活跃。开源项目像PointInPolygon这样的算法库在社区中广泛被使用和分享,这促进了知识的传播和代码质量的提高。
以上内容是对给定文件信息中提及的知识点的详细说明。根据描述,该算法库可用于各种需要点定位和多边形空间分析的场景,例如地理信息系统(GIS)、图形用户界面(GUI)交互、游戏开发、计算机图形学等领域。
【R-Studio恢复工具解析】:RAID 5恢复的功能优势与实际应用
# 摘要
RAID 5技术因其高效的数据存储和容错能力被广泛应用。然而,数据丢失问题仍时有发生,R-Studio作为一种功能强大的恢复工具,为解决这一问题提供了有效的技术方案。本文概述了RAID 5的基本概念、R-Studio的理论基础及其数据恢复原理。通过分析R-Studio的主要功能和恢复流程,本文还探讨了该工具
汇编程序编写一个程序,实现在屏幕上输出helloworld。
汇编语言是一种低级编程语言,它直接操作计算机硬件。要在汇编程序中编写一个简单的"Hello, World!"程序,你需要针对特定的CPU架构编写指令。这里以x86架构为例,使用Intel x86汇编:
```assembly
section .data
message db 'Hello, World!',0 ; 字符串常量
len equ $ - message ; 计算字符串长度
section .text
global _start ; 标记程序入口点
_start:
; 设置段寄存
Salesforce Field Finder扩展:快速获取API字段名称
资源摘要信息:"Salesforce Field Finder-crx插件"
Salesforce Field Finder是一个专为Salesforce平台设计的浏览器插件,它极大地简化了开发者和管理员在查询和管理Salesforce对象字段时的工作流程。该插件的主要功能是帮助用户快速找到任何特定字段的API名称,从而提高工作效率和减少重复性工作。
首先,插件设计允许用户在Salesforce的各个对象中快速浏览字段。用户可以在需要的时候选择相应的对象名称,然后该插件会列出所有相关的字段及其对应的API名称。这个特性对于初学者和有经验的开发者都是极其有用的,因为它允许用户避免记忆和查找每个字段的API名称,尤其是在处理具有大量字段的复杂对象时。
其次,Salesforce Field Finder提供了搜索功能,这使得用户可以在众多字段中快速定位到他们想要的信息。这意味着,无论字段列表有多长,用户都可以直接输入关键词,插件会立即筛选出匹配的字段,并展示其API名称。这一点尤其有助于在开发过程中,当需要引用特定字段的API名称时,能够迅速而准确地找到所需信息。
插件的使用操作也非常简单。用户只需安装该插件到他们的浏览器中,然后在使用Salesforce时,打开Field Finder界面,选择相应的对象,就可以看到一个字段列表,其中列出了字段的标签名称和API名称。对于那些API名称不直观或难以记忆的场景,这个功能尤其有帮助。
值得注意的是,该插件支持的浏览器类型和版本,用户需要确保在自己的浏览器上安装了最新版本的Salesforce Field Finder插件,以获得最佳的使用体验和完整的功能支持。
总体来说,Salesforce Field Finder是一个非常实用的工具,它可以帮助用户在使用Salesforce平台进行开发和管理时,极大地减少查找字段API名称所需的时间和精力,提高工作效率。对于那些每天需要和Salesforce API打交道的用户来说,这个插件无疑是一个时间节省利器。
另外,由于Salesforce Field Finder是一个浏览器插件,它也展示了浏览器扩展在提高生产力和用户体验方面的潜力。通过为特定的在线应用或服务开发专门的插件,开发者能够为用户提供更加高效和定制化的服务,这是现代IT行业不断追求的目标之一。因此,了解和使用类似Salesforce Field Finder这样的工具,对于提高个人的技术能力以及适应不断变化的IT行业环境都具有重要意义。
【故障诊断与恢复】:R-Studio技术解决RAID 5数据挑战
# 摘要
RAID 5技术广泛应用于数据存储领域,提供了容错性和数据冗余,尽管如此,故障和数据丢失的风险依然存在。本文综合探讨了RAID 5的工作原理、常见故障类型、数据恢复的挑战以及R-Studio工具在数据恢复中的应用和高级功能。通过对RAID 5故障风险的分析和R-Studio使用案例的深入解析,本文旨在提供针对RAID 5数据恢复的实用知识和最佳实践,同时强调数据保护和预防措施的重要性,以增强系统稳定性并提升数据恢复效率。