uwb定位算法 chan算法
时间: 2023-05-14 10:03:29 浏览: 340

超宽带+定位算法.rar
UWB定位算法是一种新兴的室内定位技术,其基础是超宽带技术,利用超短脉冲信号在空气中传播的特性,实现对室内物体的定位、跟踪等。而Chan算法是UWB定位算法中的一种,它主要用于解决多径效应带来的定位误差。
多径效应指的是UWB信号在传输过程中,会穿过多个路径到达接收器,形成多个相位相似、强度不同的信号。Chan算法通过对接收到的这些多个信号进行分析和处理,提取出主要成分,去除冗余信息,从而减小多径对定位精度的影响。
Chan算法的处理过程包括两个部分:信号分解和解调。信号分解是指将接收到的复杂多径信号拆分为几个互相独立的成分,每个成分对应一个路径。解调则是针对每个成分进行解调,求出其相位和幅度信息,再根据这些信息进行定位。
Chan算法具有简单易用、稳定性好等优点,不需要复杂的运算和优化,能够适用于不同场景下的UWB定位需求。目前,Chan算法已经被广泛应用于智能家居、无人机、机器人等多个领域,并且得到了良好的效果。
阅读全文
相关推荐
最新推荐
基于UWB的智能跟随车导航定位算法研究
《基于UWB的智能跟随车导航定位算法研究》 随着科技的快速发展,智能跟随车作为新兴的智能设备,正逐渐走进人们的日常生活。然而,现有的智能跟随车定位精度问题成为限制其实用性的关键因素。本文针对这一问题,...
基于超宽带技术的TDOA室内三维定位算法研究
为了应对这一挑战,研究者们探索了多种定位算法,其中TDOA(Time Difference of Arrival)算法因无需传感器与目标间的时钟同步而备受青睐。 【TDOA算法与Fang算法】TDOA算法利用多个传感器接收到信号的时间差来确定...
JHU荣誉单变量微积分课程教案介绍
资源摘要信息:"jhu2017-18-honors-single-variable-calculus"
知识点一:荣誉单变量微积分课程介绍
本课程为JHU(约翰霍普金斯大学)的荣誉单变量微积分课程,主要针对在2018年秋季和2019年秋季两个学期开设。课程内容涵盖两个学期的微积分知识,包括整合和微分两大部分。该课程采用IBL(Inquiry-Based Learning)格式进行教学,即学生先自行解决问题,然后在学习过程中逐步掌握相关理论知识。
知识点二:IBL教学法
IBL教学法,即问题导向的学习方法,是一种以学生为中心的教学模式。在这种模式下,学生在教师的引导下,通过提出问题、解决问题来获取知识,从而培养学生的自主学习能力和问题解决能力。IBL教学法强调学生的主动参与和探索,教师的角色更多的是引导者和协助者。
知识点三:课程难度及学习方法
课程的第一次迭代主要包含问题,难度较大,学生需要有一定的数学基础和自学能力。第二次迭代则在第一次的基础上增加了更多的理论和解释,难度相对降低,更适合学生理解和学习。这种设计旨在帮助学生从实际问题出发,逐步深入理解微积分理论,提高学习效率。
知识点四:课程先决条件及学习建议
课程的先决条件为预演算,即在进入课程之前需要掌握一定的演算知识和技能。建议在使用这些笔记之前,先完成一些基础演算的入门课程,并进行一些数学证明的练习。这样可以更好地理解和掌握课程内容,提高学习效果。
知识点五:TeX格式文件
标签"TeX"意味着该课程的资料是以TeX格式保存和发布的。TeX是一种基于排版语言的格式,广泛应用于学术出版物的排版,特别是在数学、物理学和计算机科学领域。TeX格式的文件可以确保文档内容的准确性和排版的美观性,适合用于编写和分享复杂的科学和技术文档。
管理建模和仿真的文件
管理Boualem Benatallah引用此版本:布阿利姆·贝纳塔拉。管理建模和仿真。约瑟夫-傅立叶大学-格勒诺布尔第一大学,1996年。法语。NNT:电话:00345357HAL ID:电话:00345357https://theses.hal.science/tel-003453572008年12月9日提交HAL是一个多学科的开放存取档案馆,用于存放和传播科学研究论文,无论它们是否被公开。论文可以来自法国或国外的教学和研究机构,也可以来自公共或私人研究中心。L’archive ouverte pluridisciplinaire
【实战篇:自定义损失函数】:构建独特损失函数解决特定问题,优化模型性能
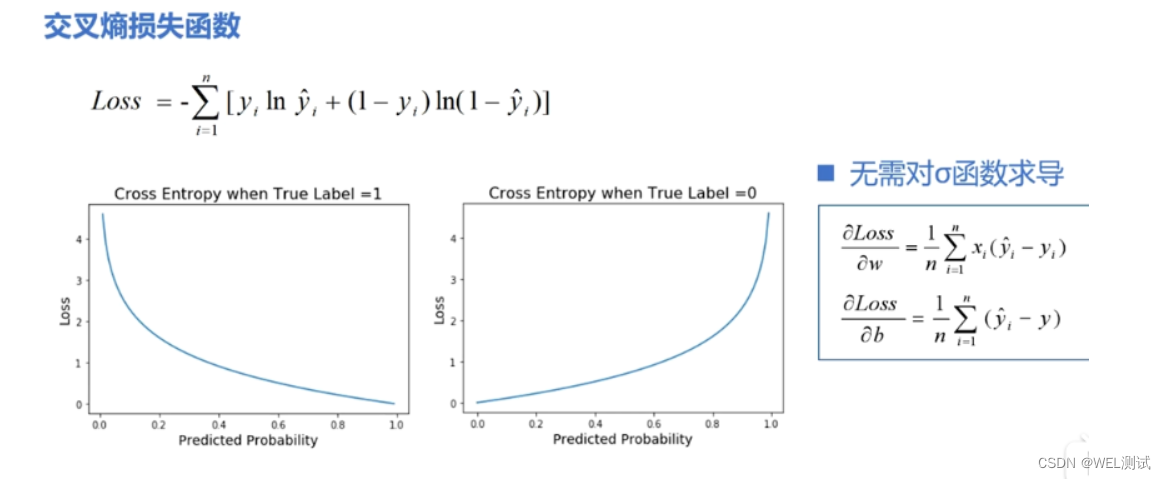
# 1. 损失函数的基本概念与作用
## 1.1 损失函数定义
损失函数是机器学习中的核心概念,用于衡量模型预测值与实际值之间的差异。它是优化算法调整模型参数以最小化的目标函数。
```math
L(y, f(x)) = \sum_{i=1}^{N} L_i(y_i, f(x_i))
```
其中,`L`表示损失函数,`y`为实际值,`f(x)`为模型预测值,`N`为样本数量,`L_i`为第`i`个样本的损失。
## 1.2 损
如何在ZYNQMP平台上配置TUSB1210 USB接口芯片以实现Host模式,并确保与Linux内核的兼容性?
要在ZYNQMP平台上实现TUSB1210 USB接口芯片的Host模式功能,并确保与Linux内核的兼容性,首先需要在硬件层面完成TUSB1210与ZYNQMP芯片的正确连接,保证USB2.0和USB3.0之间的硬件电路设计符合ZYNQMP的要求。
参考资源链接:[ZYNQMP USB主机模式实现与测试(TUSB1210)](https://wenku.csdn.net/doc/6nneek7zxw?spm=1055.2569.3001.10343)
具体步骤包括:
1. 在Vivado中设计硬件电路,配置USB接口相关的Bank502和Bank505引脚,同时确保USB时钟的正确配置。
Naruto爱好者必备CLI测试应用
资源摘要信息:"Are-you-a-Naruto-Fan:CLI测验应用程序,用于检查Naruto狂热者的知识"
该应用程序是一个基于命令行界面(CLI)的测验工具,设计用于测试用户对日本动漫《火影忍者》(Naruto)的知识水平。《火影忍者》是由岸本齐史创作的一部广受欢迎的漫画系列,后被改编成同名电视动画,并衍生出一系列相关的产品和文化现象。该动漫讲述了主角漩涡鸣人从忍者学校开始的成长故事,直到成为木叶隐村的领袖,期间包含了忍者文化、战斗、忍术、友情和忍者世界的政治斗争等元素。
这个测验应用程序的开发主要使用了JavaScript语言。JavaScript是一种广泛应用于前端开发的编程语言,它允许网页具有交互性,同时也可以在服务器端运行(如Node.js环境)。在这个CLI应用程序中,JavaScript被用来处理用户的输入,生成问题,并根据用户的回答来评估其对《火影忍者》的知识水平。
开发这样的测验应用程序可能涉及到以下知识点和技术:
1. **命令行界面(CLI)开发:** CLI应用程序是指用户通过命令行或终端与之交互的软件。在Web开发中,Node.js提供了一个运行JavaScript的环境,使得开发者可以使用JavaScript语言来创建服务器端应用程序和工具,包括CLI应用程序。CLI应用程序通常涉及到使用诸如 commander.js 或 yargs 等库来解析命令行参数和选项。
2. **JavaScript基础:** 开发CLI应用程序需要对JavaScript语言有扎实的理解,包括数据类型、函数、对象、数组、事件循环、异步编程等。
3. **知识库构建:** 测验应用程序的核心是其问题库,它包含了与《火影忍者》相关的各种问题。开发人员需要设计和构建这个知识库,并确保问题的多样性和覆盖面。
4. **逻辑和流程控制:** 在应用程序中,需要编写逻辑来控制测验的流程,比如问题的随机出现、计时器、计分机制以及结束时的反馈。
5. **用户界面(UI)交互:** 尽管是CLI,用户界面仍然重要。开发者需要确保用户体验流畅,这包括清晰的问题呈现、简洁的指令和友好的输出格式。
6. **模块化和封装:** 开发过程中应当遵循模块化原则,将不同的功能分隔开来,以便于管理和维护。例如,可以将问题生成器、计分器和用户输入处理器等封装成独立的模块。
7. **单元测试和调试:** 测验应用程序在发布前需要经过严格的测试和调试。使用如Mocha或Jest这样的JavaScript测试框架可以编写单元测试,并通过控制台输出调试信息来排除故障。
8. **部署和分发:** 最后,开发完成的应用程序需要被打包和分发。如果是基于Node.js的应用程序,常见的做法是将其打包为可执行文件(如使用electron或pkg工具),以便在不同的操作系统上运行。
根据提供的文件信息,虽然具体细节有限,但可以推测该应用程序可能采用了上述技术点。用户通过点击提供的链接,可能将被引导到一个网页或直接下载CLI应用程序的可执行文件,从而开始进行《火影忍者》的知识测验。通过这个测验,用户不仅能享受答题的乐趣,还可以加深对《火影忍者》的理解和认识。
"互动学习:行动中的多样性与论文攻读经历"
多样性她- 事实上SCI NCES你的时间表ECOLEDO C Tora SC和NCESPOUR l’Ingén学习互动,互动学习以行动为中心的强化学习学会互动,互动学习,以行动为中心的强化学习计算机科学博士论文于2021年9月28日在Villeneuve d'Asq公开支持马修·瑟林评审团主席法布里斯·勒菲弗尔阿维尼翁大学教授论文指导奥利维尔·皮耶昆谷歌研究教授:智囊团论文联合主任菲利普·普雷教授,大学。里尔/CRISTAL/因里亚报告员奥利维耶·西格德索邦大学报告员卢多维奇·德诺耶教授,Facebook /索邦大学审查员越南圣迈IMT Atlantic高级讲师邀请弗洛里安·斯特鲁布博士,Deepmind对于那些及时看到自己错误的人...3谢谢你首先,我要感谢我的两位博士生导师Olivier和Philippe。奥利维尔,"站在巨人的肩膀上"这句话对你来说完全有意义了。从科学上讲,你知道在这篇论文的(许多)错误中,你是我可以依
【强化学习损失函数探索】:奖励函数与损失函数的深入联系及优化策略
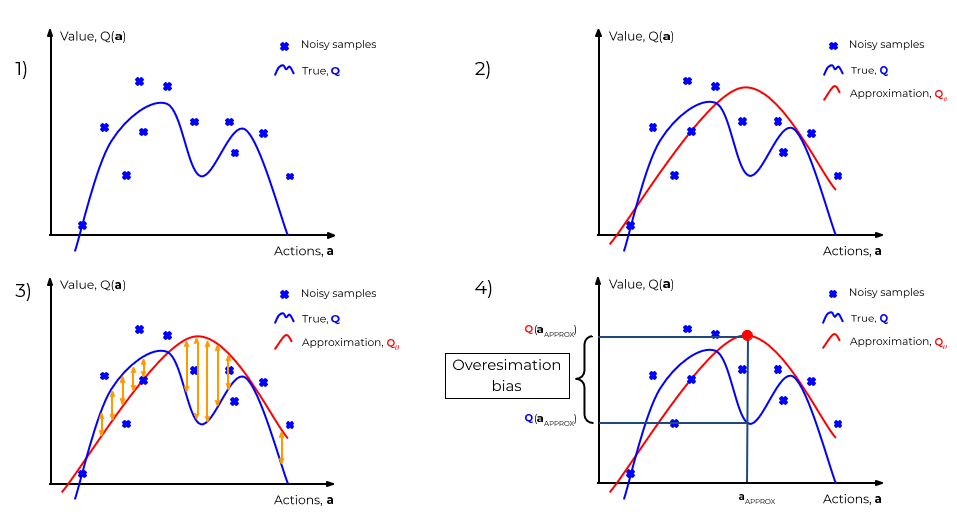
# 1. 强化学习中的损失函数基础
强化学习(Reinforcement Learning, RL)是机器学习领域的一个重要分支,它通过与环境的互动来学习如何在特定任务中做出决策。在强化学习中,损失函数(loss function)起着至关重要的作用,它是学习算法优化的关键所在。损失函数能够衡量智能体(agent)的策略(policy)表现,帮助智能体通过减少损失来改进自
如何在Springboot后端项目中实现前端的多人视频会议功能,并使用Vue.js与ElementUI进行界面开发?
要在Springboot后端项目中实现前端的多人视频会议功能,首先需要了解Springboot、WebRTC、Vue.js以及ElementUI的基本概念和用途。Springboot作为后端框架,负责处理业务逻辑和提供API接口;WebRTC技术则用于实现浏览器端的实时视频和音频通信;Vue.js作为一个轻量级的前端框架,用于构建用户界面;ElementUI提供了丰富的UI组件,可加速前端开发过程。
参考资源链接:[多人视频会议前端项目:Springboot与WebRTC的结合](https://wenku.csdn.net/doc/6jkpejn9x3?spm=1055.2569.3001