深入掌握MATLAB仿真:构建动态系统,算法实现的终极指南
发布时间: 2024-08-30 21:19:03 阅读量: 244 订阅数: 59 

实时通讯_PubNub_Python_SDK_开发工具_1741399528.zip
# 1. MATLAB仿真基础概述
MATLAB(Matrix Laboratory的缩写)是一种高性能的数值计算环境和第四代编程语言。它集数值分析、矩阵计算、信号处理和图形可视化于一体,被广泛应用于工程计算、控制设计、信号处理和通信领域等众多领域。
MATLAB的主要特点包括:
- 强大的数值计算能力:MATLAB可以进行矩阵运算、统计分析和复杂函数的数值计算。
- 方便的程序设计和调试:MATLAB拥有丰富的内置函数库和工具箱,可以轻松地实现算法设计和程序调试。
- 丰富的图形显示功能:MATLAB提供了丰富的图形用户界面,可以方便地绘制二维和三维图形,以及进行动画演示。
在仿真领域,MATLAB提供的Simulink工具箱可以帮助工程师快速构建动态系统的模型,并进行仿真分析。这对于验证设计,理解系统行为,以及在实际制造前预测系统的性能具有非常重要的意义。接下来的章节将详细探讨如何利用MATLAB进行动态系统模型的构建、算法实现与优化,以及仿真项目的实战应用。
# 2. MATLAB动态系统模型构建
## 2.1 动态系统模型的理论基础
### 2.1.1 系统模型的数学表达
动态系统的数学模型是对其行为的数学描述,它包括系统状态的定义、输入和输出之间的关系、系统的动态特性和各种约束条件。一个典型的动态系统可以使用以下数学表达式来表示:
- **常微分方程**(ODEs):描述连续时间动态系统的演变过程。
\[ \frac{dx(t)}{dt} = f(x(t), u(t), t) \]
其中 \(x(t)\) 是系统状态,\(u(t)\) 是输入,\(t\) 是时间,\(f\) 是关于状态、输入和时间的函数。
- **差分方程**:描述离散时间动态系统的演变过程。
\[ x[k+1] = g(x[k], u[k], k) \]
其中 \(x[k]\) 和 \(u[k]\) 分别是系统在离散时间点 \(k\) 的状态和输入,\(g\) 是相应的函数。
- **状态空间表示**:这是动态系统最通用的表达形式,可用于描述线性和非线性、连续时间或离散时间系统。
\[ \dot{x}(t) = Ax(t) + Bu(t) \]
\[ y(t) = Cx(t) + Du(t) \]
其中 \(A, B, C, D\) 是系统矩阵,\(\dot{x}(t)\) 表示状态 \(x(t)\) 关于时间的导数。
- **传递函数**:它是连续时间线性时不变系统的另一种表达形式,通常用于描述系统的输入-输出关系。
\[ G(s) = \frac{Y(s)}{U(s)} = \frac{b_ms^m + \dots + b_1s + b_0}{s^n + a_{n-1}s^{n-1} + \dots + a_1s + a_0} \]
这些数学表达不仅构成了动态系统模型的理论基础,而且为通过MATLAB建立和分析这些模型提供了理论框架。
### 2.1.2 状态空间和传递函数的解析
状态空间模型是动态系统分析中最为重要的模型形式之一,它能够以一种系统的、结构化的方式描述系统的动态特性。MATLAB中,我们可以使用符号数学工具箱(Symbolic Math Toolbox)来进行解析计算。
假设给定一组常微分方程,我们可以首先定义状态变量 \(x_1, x_2, \ldots, x_n\) 和输入变量 \(u\),然后通过`syms`命令定义符号变量,并使用方程定义状态和输出方程,如下:
```matlab
syms x1(t) x2(t) ... xn(t) u(t)
x_dot = [diff(x1,t); diff(x2,t); ...; diff(xn,t)] == [f1(x1,x2,...,xn,u); f2(x1,x2,...,xn,u); ...; fn(x1,x2,...,xn,u)]
y = [g1(x1,x2,...,xn,u); g2(x1,x2,...,xn,u); ...; gm(x1,x2,...,xn,u)]
```
其中`diff`用于表示求导操作,等号左侧的向量是状态向量的时间导数。
对于传递函数,MATLAB提供了`tf`函数来从系统的分子和分母多项式系数直接构造传递函数。例如,给定上面的传递函数\(G(s)\)表示形式,可以使用以下MATLAB代码创建传递函数模型:
```matlab
num = [b_m, b_(m-1), ..., b_1, b_0]; % 分子系数向量
den = [1, a_(n-1), ..., a_1, a_0]; % 分母系数向量
G_s = tf(num, den); % 创建传递函数模型
```
## 2.2 MATLAB在系统建模中的应用
### 2.2.1 Simulink的使用和仿真流程
Simulink是MATLAB的一个附加产品,它提供了一个可视化的环境用于模拟、建模和分析多域动态系统。以下是使用Simulink的基本步骤:
1. 打开Simulink界面并创建新模型。
2. 从Simulink库中选择和拖拽所需的模块到模型窗口中。
3. 连接各个模块,形成完整的系统模型。
4. 双击各个模块设置参数。
5. 配置仿真的起始和结束时间。
6. 点击运行按钮进行仿真。
7. 观察和分析仿真结果。
下面的流程图展示了一个Simulink模型构建和仿真的基本流程:
```mermaid
flowchart LR
A[打开Simulink] --> B[选择模块]
B --> C[拖拽模块到模型窗口]
C --> D[连接模块]
D --> E[设置模块参数]
E --> F[配置仿真时间]
F --> G[执行仿真]
G --> H[分析结果]
```
### 2.2.2 基本模块的搭建和参数设定
在Simulink中,最简单的模型可以通过输入源(如Signal Generator)、一个或多个处理模块(如Gains, Sum, Integrator等),以及输出模块(如Scope)来搭建。搭建过程涉及模块的配置和参数设定。例如,我们可以使用Integrator模块对信号进行积分,此时需要设定积分器的初始条件。
对于每个模块,可以通过以下步骤进行参数设定:
1. 双击模块,打开模块参数对话框。
2. 根据需要,调整对话框中的参数设置。
3. 保存并关闭参数对话框。
例如,对于Integrator模块,其对话框参数设置如下:
```matlab
integ_params = { 'InitialCondition', 0 }
```
### 2.2.3 复杂系统模型的构建实例
构建复杂系统模型需要对系统的结构和行为有深入的理解。以一个简单的弹簧-质量-阻尼器系统为例,其动力学方程可表示为:
\[ m\ddot{x} + b\dot{x} + kx = u(t) \]
其中 \(m\) 是质量,\(b\) 是阻尼系数,\(k\) 是弹簧刚度,\(x\) 是位移,\(\ddot{x}\) 和 \(\dot{x}\) 分别是位移的二阶和一阶导数,\(u(t)\) 是外部作用力。
在Simulink中构建此系统模型的步骤包括:
1. 使用Simulink中的库浏览器,找到并添加`Mass`, `Damper`, `Spring`模块。
2. 连接这些模块以匹配上述的动力学方程。
3. 添加一个输入模块(如`Signal Generator`),用以施加外部力。
4. 添加输出模块(如`Scope`),以便观察系统的响应。
## 2.3 动态系统仿真的验证和分析
### 2.3.1 系统响应的分析方法
仿真完成后,系统响应的分析对于验证模型的正确性和预测系统行为至关重要。以下是一些常用的系统响应分析方法:
1. **时间响应分析**:通过观察系统在特定输入下的时间响应来了解系统性能。常用工具包括`Scope`和`To Workspace`。
2. **频率响应分析**:分析系统对不同频率输入的响应,这可以通过`Linear Analysis`工具箱中的`bode`, `nyquist`, `nichols`函数完成。
3. **稳定性分析**:通过计算特征值或使用`rlocus`、`margin`等函数进行系统的稳定性分析。
4. **参数敏感性分析**:研究系统参数变化对系统性能的影响,通常使用脚本形式循环改变参数进行仿真。
### 2.3.2 仿真结果的验证技巧
仿真结果的验证是一个关键步骤,必须确保模型输出与真实系统行为相吻合。以下是一些常用的验证技巧:
1. **与理论结果比较**:如果可能的话,将仿真结果与理论分析或手工计算的结果进行比较。
2. **与实验数据比较**:如果系统有实验数据,可以通过仿真与实验结果的对比来验证仿真模型的准确性。
3. **交叉验证**:通过使用不同的仿真模块或工具(如Simulink与MATLAB脚本)重复仿真并比较结果。
4. **误差分析**:对仿真结果进行统计分析,比如误差的均值、方差等,以评估模型的准确性。
5. **敏感性分析**:通过改变系统的关键参数,来验证仿真结果对这些参数的敏感程度,确保模型具有一定的鲁棒性。
通过这些方法,我们可以从多方面对仿真结果进行验证,确保模型的准确性和可靠性。
# 3. ```markdown
# 第三章:MATLAB算法实现与优化
在这一章节中,我们将深入探讨如何利用MATLAB的强大功能来实现和优化算法。算法是计算机程序设计的核心,它决定了解决问题的方法和效率。MATLAB作为一款集数值计算、可视化和编程于一体的软件,对于算法的实现和优化提供了丰富的工具和方法。我们将从算法理论基础讲起,逐步过渡到MATLAB算法编程的实际操作,最后讨论算法优化的策略和技术。
## 3.1 算法理论基础
### 3.1.1 算法设计原则和步骤
算法是解决问题的一系列明确的、有序的、可重复的计算步骤。设计一个算法首先需要对问题进行透彻的分析,并明确算法的目标和约束条件。在此基础上,算法设计应遵循以下原则:
- **确定性**:算法的每一步都必须清晰且确定,避免歧义。
- **有限性**:算法应能在有限步骤内完成计算并得出结果。
- **可执行性**:算法的每一步都应该是基本操作,能够在计算机上实现。
- **输入**:算法应有零个或多个输入,这些输入应是明确定义的数据。
- **输出**:算法应至少有一个输出,通常是问题的解。
算法设计的步骤通常包括:
1. **问题定义**:明确算法要解决的问题。
2. **输入输出确定**:定义输入输出的格式和范围。
3. **草拟伪代码**:使用自然语言和控制结构表达算法。
4. **细化伪代码**:将伪代码转换成更详细的步骤。
5. **编码实现**:将细化后的伪代码转换为程序代码。
6. **测试和调试**:验证算法的正确性和效率。
### 3.1.2 常用算法及其特点
在算法的海洋中,有许多常用的算法类型,每种类型都有其特定的应用场景和优缺点。以下是一些最常用的算法类型及其特点:
- **排序算法**:用于将一组数据按照特定顺序排列。常见的排序算法有快速排序、归并排序、冒泡排序等,它们在不同的数据规模和数据特征下表现出不同的效率。
- **搜索算法**:用于在数据集合中查找特定元素。线性搜索简单但效率低,而二分搜索则效率较高,但要求数据已经排序。
- **动态规划**:解决具有重叠子问题和最优子结构特征的问题。它将大问题分解成小问题,并存储小问题的解,避免重复计算。
- **图算法**:用于解决图论相关问题,如最短路径算法(Dijkstra、Floyd-Warshall)、最小生成树算法(Kruskal、Prim)等。
## 3.2 MATLAB中的算法编程
### 3.2.1 MATLAB函数和脚本的编写
在MATLAB中编写算法,通常需要编写函数或脚本。函数是MATLAB中的一种代码单元,它接收输入参数,执行特定任务,然后返回输出参数。脚本则是包含一系列MATLAB语句的文件,用于自动化任务或数据处理流程。
#### 编写MATLAB函数
函数文件通常由两部分组成:函数定义行和函数体。
```matlab
function [output1, output2] = myFunction(input1, input2)
% 在此处编写函数的实现代码
end
```
函数定义行指明函数的名称、输入输出参数。函数体则是具体的操作步骤。
#### 编写MATLAB脚本
脚本文件没有函数定义行,直接从第一行开始执行代码。
```matlab
% 示例:一个简单的脚本,计算数组元素之和
data = [1, 2, 3, 4, 5];
sum = sum(data);
disp(['数组元素之和为:', num2str(sum)]);
```
### 3.2.2 算法的调试和性能评估
编写算法后,必须经过严格的调试和性能评估,以确保其正确性和效率。
#### 调试技巧
- 使用MATLAB的`dbstop`命令在特定点停止执行,检查变量状态。
- 利用MATLAB的编辑器进行逐行执行,观察每一步的输出。
- 使用`assert`函数进行条件断言,验证特定条件是否满足。
#### 性能评估
性能评估通常涉及算法的执行时间、内存使用量等方面。MATLAB中可以使用`tic`和`toc`命令来测量代码段的执行时间。
```matlab
tic
% 算法代码段
toc
```
## 3.3 算法的优化策略
### 3.3.1 代码优化和执行效率提升
在MATLAB中,算法执行效率的提升通常是通过优化代码实现的。以下是几个常见的优化策略:
- **向量化操作**:使用矩阵和数组操作代替循环,减少循环开销。
- **内存管理**:合理分配和管理内存,避免不必要的数据复制。
- **利用内置函数**:MATLAB提供了一些高效实现的内置函数,直接使用这些函数通常比自己编写的代码执行效率更高。
- **并行计算**:对于可以并行的任务,使用MATLAB的`parfor`等并行计算工具。
### 3.3.2 利用MATLAB内置函数和工具箱
MATLAB内置了大量高质量的函数和工具箱,它们可以帮助我们快速实现特定功能,并且优化性能。
#### 利用内置函数
例如,对于矩阵运算,MATLAB提供了高效的内置函数来完成操作。
```matlab
A = [1, 2; 3, 4];
B = [5, 6; 7, 8];
C = A * B; % 使用内置的矩阵乘法函数
```
#### 使用工具箱
MATLAB提供了多种工具箱来处理特定领域的算法问题,如`Image Processing Toolbox`、`Signal Processing Toolbox`等。
```matlab
% 示例:使用信号处理工具箱进行快速傅里叶变换
x = randn(1024,1);
y = fft(x);
```
通过上述的分析,我们能够看到在MATLAB中实现和优化算法的过程。这一过程不仅需要坚实的算法理论基础,还需要熟练掌握MATLAB编程的实践技能。本章的后续部分将继续深入探讨算法优化的具体方法,以及如何应用到实际问题中去。
```
# 4. ```
# 第四章:MATLAB仿真项目实战
在这一章节中,我们将深入探讨如何运用MATLAB进行仿真项目的实际操作,从项目选择到需求分析,再到仿真模型的构建、执行,以及最终仿真结果的评估和改进。整个过程涉及到的知识和技能将按照由浅入深的方式进行介绍,确保即使是经验丰富的IT从业者也能从中获得新的启发和知识。
## 4.1 选择仿真项目和需求分析
### 4.1.1 项目选题的标准和过程
在选择仿真项目时,应遵循以下标准和过程,确保项目的可行性和实用性。
- **目标明确性**:项目的目标应当是明确的,这样可以保证项目在进行过程中不会偏离预定的目标。
- **技术可行性**:所选项目应当符合当前的技术水平和应用范围,过高或过低的技术要求都不利于项目的成功。
- **资源可获得性**:项目实施所需的资源,包括时间、资金、人力等,应当是可获得的。
- **风险可控性**:应评估项目潜在的风险,确保风险在可控制范围内。
- **创新性**:选择具有一定创新性的项目,可以增加项目的学术或商业价值。
**项目选择过程**:
1. **需求搜集**:广泛搜集潜在的项目需求,包括市场调研、文献回顾等方式。
2. **需求筛选**:根据项目选题的标准对搜集到的需求进行筛选。
3. **可行性分析**:对筛选出的需求进行深入的可行性分析,包括技术、经济、法律等多方面。
4. **确定目标**:最终确定项目的目标和预期成果。
5. **制定计划**:制定详细的项目计划,包括时间表、预算、资源分配等。
### 4.1.2 需求分析和系统设计
需求分析是项目成功的关键一环,它涉及到对项目目标的理解和对系统功能的详细规划。
- **功能需求**:明确系统应当具备的功能。
- **性能需求**:确定系统应达到的性能指标,例如速度、精度、稳定性等。
- **用户界面需求**:设计用户界面以确保用户友好性和操作便利性。
**系统设计步骤**:
1. **需求提取**:通过访谈、问卷等方式获取用户需求。
2. **需求整理**:将获取的需求进行分类和排序。
3. **功能规划**:根据需求制定系统功能模块。
4. **结构设计**:设计系统的物理和逻辑结构。
5. **界面设计**:确定系统的用户界面和交互方式。
## 4.2 系统模型的构建与仿真实施
### 4.2.1 模型构建的具体步骤和注意事项
在构建系统模型时,需要遵循一系列步骤,同时注意一些关键事项,以确保模型的有效性和准确性。
**模型构建步骤**:
1. **理论研究**:根据需求分析,研究相关的理论和技术,为模型构建提供理论支持。
2. **假设条件**:明确模型构建的假设条件,以便于简化实际情况,提高模型的可操作性。
3. **模型框架设计**:设计系统的整体框架和主要模块。
4. **参数设定**:根据实际情况和理论研究设定模型参数。
5. **模型验证**:通过与实际情况对比,验证模型的正确性和合理性。
**注意事项**:
- **参数的正确性**:确保所有参数都经过精确计算和验证。
- **模型的简化与现实性**:既要简化模型以提高运算效率,也要保证其与现实情况的匹配度。
- **灵敏度分析**:进行灵敏度分析,观察参数变化对模型输出的影响。
### 4.2.2 实施仿真运行和结果记录
仿真运行阶段是实际测试模型性能的重要环节,也是收集实验数据的基础。
**仿真运行步骤**:
1. **仿真环境搭建**:确保仿真环境配置正确无误。
2. **模型加载与配置**:将构建好的模型加载到仿真软件中,并进行必要的配置。
3. **运行仿真**:按照预定的仿真计划,启动仿真进程。
4. **结果监测**:实时监测仿真进程中的数据变化。
5. **数据记录**:将仿真过程中的关键数据记录下来,以备后续分析。
**结果记录方法**:
- **日志记录**:采用日志文件记录仿真过程中的关键信息。
- **数据保存**:将仿真数据保存在数据库或文件中,便于后续的分析和比较。
## 4.3 仿真结果的评估与改进
### 4.3.1 结果分析和评估方法
仿真结果的评估是判断模型和仿真是否达到预期目标的关键步骤。
**评估方法**:
- **与理论对比**:将仿真结果与理论计算结果进行对比,分析差异的原因。
- **与实际对比**:将仿真结果与现实情况对比,检验模型的准确度。
- **统计分析**:利用统计学方法对仿真结果进行分析,评估模型的稳定性和可靠性。
### 4.3.2 根据结果进行系统的改进策略
根据仿真结果的评估,对系统进行改进是提高系统性能的必要步骤。
**改进策略**:
1. **问题识别**:识别出仿真结果中出现的问题和不足之处。
2. **解决方案制定**:针对识别出的问题,制定相应的解决方案。
3. **模型优化**:根据解决方案对模型进行优化调整。
4. **重复仿真验证**:对优化后的模型进行重复仿真,验证改进效果。
5. **系统更新**:根据验证结果,对实际系统进行必要的更新和调整。
通过对仿真结果的细致分析和系统性的改进策略实施,项目可以得到逐步优化,最终达到预期目标,甚至超越预期目标。
```
在上述章节内容中,我们深入探讨了如何选择合适的仿真项目、进行需求分析、构建和实施系统模型,以及如何对仿真结果进行评估和改进。本章内容旨在为IT领域的专业人士提供一个完整的仿真项目实战流程,涵盖了从项目选择到结果改进的整个生命周期。通过具体的操作步骤、注意事项和评估改进策略,本章内容不仅对初学者具有指导意义,同时也为有经验的从业者提供了提升项目质量的方法和思路。
# 5. MATLAB仿真高级应用
## 5.1 高级仿真技术与算法
### 5.1.1 多体动力学仿真技术
在工程领域,多体动力学仿真是一种模拟复杂系统运动和力传递的技术,对于汽车、航天器、机器人等领域的设计和测试尤为重要。在MATLAB中,利用Simulink模块,我们可以构建和分析涉及多个刚性或弹性体相互作用的系统。Simulink提供了广泛的工具箱,例如Simscape Multibody,专门用于此类仿真。
```matlab
% 基于Simscape Multibody创建多体系统示例
open_system('sm_multibody');
sim('sm_multibody');
```
在上面的代码中,`open_system`用于打开Simscape Multibody的预设模型,`sim`函数则用于执行仿真。用户可以通过定义刚体的质量、惯性、位置以及它们之间的约束关系来构建模型。
### 5.1.2 混合系统和复杂系统仿真
混合系统指的是系统内同时包含连续和离散动态行为的系统。在MATLAB中,我们可以使用Stateflow和Simulink共同进行混合系统的仿真。Stateflow能够处理复杂状态机和逻辑,而Simulink处理连续系统部分。
```matlab
% 打开一个包含Stateflow的混合系统模型
open_system('mHybridModel');
```
在上述命令中,`open_system`函数用于打开一个包含Stateflow的混合系统仿真模型。通过使用这些工具,可以模拟复杂系统,如汽车传动系统的动态特性、航空电子设备的逻辑控制等。
## 5.2 MATLAB与外部工具的集成
### 5.2.1 MATLAB与其他编程语言的交互
MATLAB提供了多种方式与C、C++、Java等编程语言进行交互。它允许用户将外部代码作为MATLAB函数调用。Matlab Engine API是与外部语言交互的一种方式,它允许从其他编程环境中调用MATLAB,或将MATLAB作为计算引擎集成。
```matlab
% 使用Java调用MATLAB的示例
fun = matlab.engine.shareEngine();
result = fun.sqrt(9);
disp(result);
```
这里,`matlab.engine.shareEngine`启动MATLAB引擎并共享给Java程序,之后就可以使用`fun.sqrt`方法来进行数学计算。
### 5.2.2 MATLAB与硬件设备的数据交互
MATLAB能够与各种硬件设备直接通信,如微控制器、传感器和仪器。通过Data Acquisition Toolbox和Instrument Control Toolbox,我们可以实现数据采集和仪器控制。
```matlab
% 使用Data Acquisition Toolbox进行数据采集
da = analoginput('nidaq', 'Dev1'); % 创建NI数据采集对象
addchannel(da, 0); % 添加通道
start(da); % 开始采集数据
data = getdata(da); % 获取数据
stop(da); % 停止采集
delete(da); % 删除对象
```
此代码段展示了如何使用MATLAB的Data Acquisition Toolbox与National Instruments的数据采集硬件进行通信。
## 5.3 仿真结果的可视化和报告编写
### 5.3.1 图形化结果的展示技巧
MATLAB提供了强大的图形化工具来展示仿真结果。使用MATLAB绘图函数,如`plot`、`scatter`、`bar`等,可以创建2D和3D图形。
```matlab
% 使用plot函数创建二维图形
x = linspace(0, 10, 100);
y = sin(x);
plot(x, y);
title('Sine Wave');
xlabel('Time');
ylabel('Amplitude');
```
上述代码将生成一个正弦波的二维图形,通过`title`、`xlabel`和`ylabel`函数添加了图表标题和坐标轴标签。
### 5.3.2 仿真报告的撰写标准与模板
撰写仿真报告时,需确保报告结构清晰、内容完整。MATLAB可以输出图形和仿真数据到PDF或Word文档中。Report Generator是一个工具,它支持从MATLAB代码中自动生成报告。
```matlab
% 使用MATLAB Report Generator创建报告
rpt = makedoc('MySimulationReport', 'report', 'docx');
addtitle(rpt, '仿真结果报告');
addpagebreak(rpt);
addfigure(rpt, 'plot.png');
```
此代码段使用`makedoc`函数创建了一个Word文档类型的报告,并向其中添加了标题、分页和图形。
通过本章的学习,我们了解了MATLAB仿真在高级应用方面的强大功能。无论是多体动力学仿真、混合系统的建模还是与外部工具的集成,MATLAB都提供了高效、灵活的解决方案。此外,通过学习如何创建直观的仿真结果可视化和专业报告,可以更好地向团队或管理层传达仿真分析的成果。在接下来的实践中,读者可以尝试将这些技巧应用到自己的仿真项目中,以进一步提高工作效率和仿真结果的可用性。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
该专栏深入探讨了 MATLAB 在动态系统仿真中的应用。从构建动态系统模型到算法实现,再到优化和分析,该专栏提供了全面的指导。它涵盖了各种主题,包括数值积分、状态空间模型、控制策略、稳定性分析、联合仿真、编程高效、随机过程分析、并行计算、事件驱动仿真、GUI 设计、模型验证和测试。通过理论和代码示例的结合,该专栏旨在帮助读者掌握 MATLAB 的仿真能力,从而提高动态系统仿真的效率和精度。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
datasheet解读速成课:关键信息提炼技巧,提升采购效率

# 摘要
本文全面探讨了datasheet在电子组件采购过程中的作用及其重要性。通过详细介绍datasheet的结构并解析其关键信息,本文揭示了如何通过合理分析和利用datasheet来提升采购效率和产品质量。文中还探讨了如何在实际应用中通过标准采购清单、成本分析以及数据整合来有效使用datasheet信息,并通过案例分析展示了datasheet在采购决策中的具体应用。最后,本文预测了datasheet智能化处
【光电传感器应用详解】:如何用传感器引导小车精准路径

# 摘要
光电传感器在现代智能小车路径引导系统中扮演着核心角色,涉及从基础的数据采集到复杂的路径决策。本文首先介绍了光电传感器的基础知识及其工作原理,然后分析了其在小车路径引导中的理论应用,包括传感器布局、导航定位、信号处理等关键技术。接着,文章探讨了光电传感器与小车硬件的集成过程,包含硬件连接、软件编程及传感器校准。在实践部分,通过基
新手必看:ZXR10 2809交换机管理与配置实用教程
# 摘要
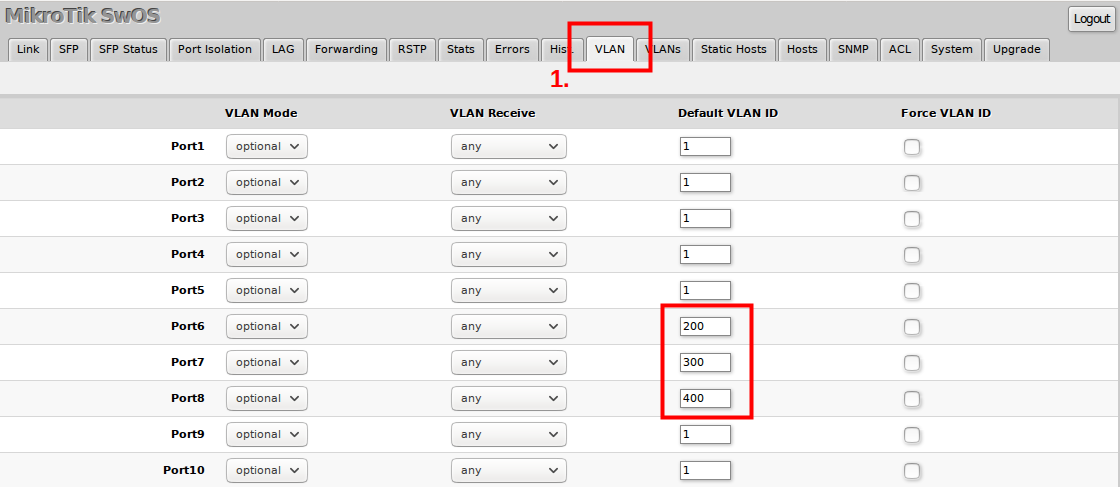
ZXR10 2809交换机作为网络基础设施的关键设备,其配置与管理是确保网络稳定运行的基础。本文首先对ZXR10 2809交换机进行概述,并介绍了基础管理知识。接着,详细阐述了交换机的基本配置,包括物理连接、初始化配置、登录方式以及接口的配置与管理。第三章深入探讨了网络参数的配置,VLAN的创建与应用,以及交换机的安全设置,如ACL配置和端口安全。第四章涉及高级网络功能,如路由配置、性能监控、故障排除和网络优
加密技术详解:专家级指南保护你的敏感数据
# 摘要
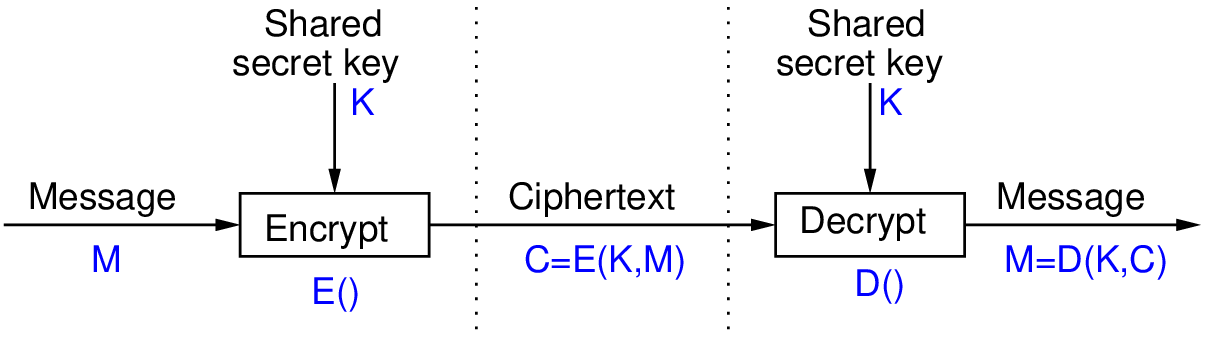
本文系统介绍了加密技术的基础知识,深入探讨了对称加密与非对称加密的理论和实践应用。分析了散列函数和数字签名在保证数据完整性与认证中的关键作用。进一步,本文探讨了加密技术在传输层安全协议TLS和安全套接字层SSL中的应用,以及在用户身份验证和加密策略制定中的实践。通过对企业级应用加密技术案例的分析,本文指出了实际应用中的挑战与解决方案,并讨论了相关法律和合规问题。最后,本文展望了加密技术的未来发展趋势,特别关注了量
【16串电池监测AFE选型秘籍】:关键参数一文读懂

# 摘要
本文全面介绍了电池监测AFE(模拟前端)的原理和应用,着重于其关键参数的解析和选型实践。电池监测AFE是电池管理系统中不可或缺的一部分,负责对电池的关键性能参数如电压、电流和温度进行精确测量。通过对AFE基本功能、性能指标以及电源和通信接口的分析,文章为读者提供了选择合适AFE的实用指导。在电池监测AFE的集成和应用章节中
VASPKIT全攻略:从安装到参数设置的完整流程解析

# 摘要
VASPKIT是用于材料计算的多功能软件包,它基于密度泛函理论(DFT)提供了一系列计算功能,包括能带计算、动力学性质模拟和光学性质分析等。本文系统介绍了VASPKIT的安装过程、基本功能和理论基础,同时提供了实践操作的详细指南。通过分析特定材料领域的应用案例,比如光催化、
【Exynos 4412内存管理剖析】:高速缓存策略与性能提升秘籍
# 摘要
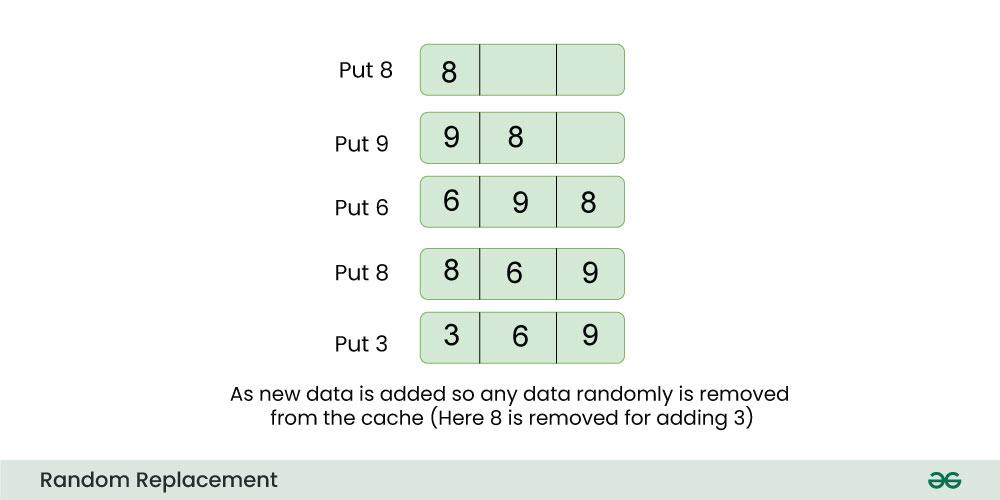
本文对Exynos 4412处理器的内存管理进行了全面概述,深入探讨了内存管理的基础理论、高速缓存策略、内存性能优化技巧、系统级内存管理优化以及新兴内存技术的发展趋势。文章详细分析了Exynos 4412的内存架构和内存管理单元(MMU)的功能,探讨了高速缓存架构及其对性能的影响,并提供了一系列内存管理实践技巧和性能提升秘籍。此外,
慧鱼数据备份与恢复秘籍:确保业务连续性的终极策略(权威指南)
# 摘要
本文全面探讨了数据备份与恢复的基础概念,备份策略的设计与实践,以及慧鱼备份技术的应用。通过分析备份类型、存储介质选择、备份工具以及备份与恢复策略的制定,文章提供了深入的技术见解和配置指导。同时,强调了数据恢复的重要性,探讨了数据恢复流程、策略以及慧鱼数据恢复工具的应用。此
【频谱分析与Time Gen:建立波形关系的新视角】:解锁频率世界的秘密
# 摘要
本文旨在探讨频谱分析的基础理论及Time Gen工具在该领域的应用。首先介绍频谱分析的基本概念和重要性,然后详细介绍Time Gen工具的功能和应用场景。文章进一步阐述频谱分析与Time Gen工具的理论结合,分析其在信号处理和时间序列分析中的作用。通过多个实践案例,本文展示了频谱分析与Time Gen工具相结合的高效性和实用性,并探讨了其在高级应用中的潜在方向和优势。本文为相关领域的研究人员和工程师
【微控制器编程】:零基础入门到编写你的首个AT89C516RD+程序
# 摘要
本文深入探讨了微控制器编程的基础知识和AT89C516RD+微控制器的高级应用。首先介绍了微控制器的基本概念、组成架构及其应用领域。随后,文章详细阐述了AT89C516RD+微控制器的硬件特性、引脚功能、电源和时钟管理。在软件开发环境方面,本文讲述了Keil uVision开发工具的安装和配置,以及编程语言的使用。接着,文章引导读者通过实例学习编写和调试AT89C516RD+的第一个程序,并探讨了微控制器在实践应用中的接口编程和中断驱动设计。最后,本文提供了高级编程技巧,包括实时操作系统的应用、模块集成、代码优化及安全性提升方法。整篇文章旨在为读者提供一个全面的微控制器编程学习路径,
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )