图像特征提取大揭秘:边缘检测到纹理分析
发布时间: 2024-07-11 04:33:59 阅读量: 139 订阅数: 42 

混合四策略改进SSA优化算法:MISSA的实证研究与应用展望 经过融合spm映射、自适应-正余弦算法、levy机制、步长因子动态调整四种策略的改进,MISSA算法测试结果惊艳,麻雀飞天变凤凰 目前相
# 1. 图像特征提取概述
图像特征提取是计算机视觉领域的关键技术,它旨在从图像中提取具有代表性的特征,以便计算机能够理解和分析图像内容。图像特征提取在许多应用中至关重要,例如图像分类、目标检测和图像检索。
图像特征可以分为两大类:全局特征和局部特征。全局特征描述整个图像的整体属性,例如颜色直方图和纹理特征。局部特征描述图像的局部区域,例如边缘和关键点。不同的特征类型适用于不同的应用场景。
图像特征提取通常涉及以下步骤:预处理、特征提取和特征描述。预处理步骤包括图像噪声去除、增强和归一化。特征提取步骤使用各种算法从图像中提取特征。特征描述步骤将提取的特征转换为适合后续处理的格式。
# 2. 边缘检测技术
### 2.1 边缘检测的基本原理
#### 2.1.1 图像梯度和边缘检测
图像梯度是图像中像素亮度变化的度量。边缘是图像中梯度值变化较大的区域,代表图像中不同区域之间的过渡。
#### 2.1.2 常见的边缘检测算子
常见的边缘检测算子包括:
* **Sobel算子:**使用两个3x3卷积核分别计算水平和垂直梯度。
* **Canny算子:**使用高斯滤波器平滑图像,然后使用Sobel算子计算梯度,再通过双阈值化和非极大值抑制来提取边缘。
* **Laplacian算子:**使用一个2D拉普拉斯算子计算图像的二阶导数,以检测图像中亮度变化的凸点和凹点。
### 2.2 边缘检测算法
#### 2.2.1 Sobel算子
Sobel算子使用以下卷积核计算水平和垂直梯度:
```
Gx = [[-1, 0, 1],
[-2, 0, 2],
[-1, 0, 1]]
Gy = [[-1, -2, -1],
[ 0, 0, 0],
[ 1, 2, 1]]
```
* `Gx`卷积核计算水平梯度,`Gy`卷积核计算垂直梯度。
* 梯度幅值计算为`sqrt(Gx^2 + Gy^2)`。
* 梯度方向计算为`arctan(Gy / Gx)`。
#### 2.2.2 Canny算子
Canny算子包括以下步骤:
1. 使用高斯滤波器平滑图像,以减少噪声。
2. 使用Sobel算子计算梯度幅值和方向。
3. 应用双阈值化:使用高阈值和低阈值来区分强边缘和弱边缘。
4. 应用非极大值抑制:沿梯度方向搜索,只保留梯度值最大的像素。
5. 应用滞后阈值化:使用低阈值来连接断开的边缘。
#### 2.2.3 Laplacian算子
Laplacian算子使用以下卷积核计算二阶导数:
```
Laplacian = [[ 0, 1, 0],
[ 1, -4, 1],
[ 0, 1, 0]]
```
* 正的Laplacian值表示图像中的凸点,负的Laplacian值表示凹点。
* 边缘位于凸点和凹点之间,即Laplacian值为0的区域。
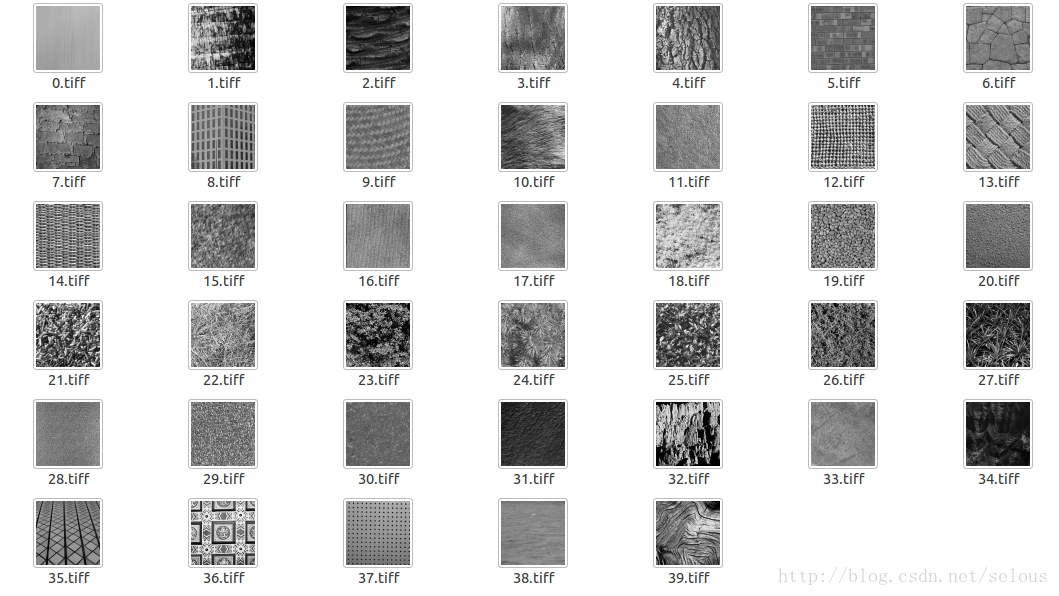
# 3.1 纹理特征的描述
#### 3.1.1 纹理的定义和分类
纹理是指图像中像素的局部排列模式,它描述了图像中物体的表面属性。纹理特征可以用来区分不同类型的物体,例如,区分木材和金属。
纹理可以根据其统计特性进行分类:
- **一阶纹理:**只考虑像素的灰度值,不考虑像素之间的空间关系。
- **二阶纹理:**考虑像素对之间的关系,例如灰度共生矩阵。
- **高阶纹理:**考虑像素组之间的关系,例如局部二值模式。
#### 3.1.2 纹理特征的提取方法
纹理特征提取方法可以分为两类:
- **基于统计的方法:**计算图像中像素的统计特性,例如灰度直方图、灰度共生矩阵。
- **基于结构的方法:**分析图像中像素的空间排列模式,例如局部二值模式、Gabor滤波器。
### 3.2 纹理分析算法
#### 3.2.1 灰度共生矩阵
灰度共生矩阵 (GLCM) 是一个二阶纹理特征,它描述了图像中像素对之间的关系。GLCM 的元素 `P(i, j, d, θ)` 表示距离为 `d`、方向为 `θ` 的像素对 `(i, j)` 和 `(i + d cos θ, j + d sin θ)` 的出现频率。
```python
import numpy as np
def compute_glcm(image, distance=1, angle=0):
"""计算灰度共生矩阵。
Args:
image (ndarray): 输入图像。
distance (int, optional): 像素对之间的距离。默认为 1。
angle (int, optional): 像素对之间的角度(以度为单位)。默认为 0。
Returns:
ndarray: 灰度共生矩阵。
"""
# 获取图像的大小和灰度等级
height, width = image.shape
num_gray_levels = np.max(image) + 1
# 初始化灰度共生矩阵
glcm = np.zeros((num_gray_levels, num_gray_levels))
# 遍历图像中的所有像素对
for i in range(height):
for j in range(width):
# 计算像素对的距离和角度
dx = distance * np.cos(angle * np.pi / 180)
dy = distance * np.sin(angle * np.pi / 180)
# 检查像素对是否在图像范围内
if i + dx < 0 or i + dx >= height or j + dy < 0 or j + dy >= width:
continue
# 获取像素对的灰度值
gray_level_1 = image[i, j]
gray_level_2 = image[int(i + dx), int(j + dy)]
# 更新灰度共生矩阵
glcm[gray_level_1, gray_level_2] += 1
return glcm
```
#### 3.2.2 局部二值模式
局部二值模式 (LBP) 是一个二阶纹理特征,它描述了图像中像素及其周围像素的比较关系。LBP 的值是中心像素与周围像素灰度值比较的结果。
```python
import numpy as np
def compute_lbp(image, radius=1):
"""计算局部二值模式。
Args:
image (ndarray): 输入图像。
radius (int, optional): 半径。默认为 1。
Returns:
ndarray: 局部二值模式图像。
"""
# 获取图像的大小
height, width = image.shape
# 初始化局部二值模式图像
lbp_image = np.zeros((height, width), dtype=np.uint8)
# 遍历图像中的所有像素
for i in range(height):
for j in range(width):
# 获取中心像素的灰度值
center_pixel = image[i, j]
# 获取周围像素的灰度值
neighbors = []
for x in range(i - radius, i + radius + 1):
for y in range(j - radius, j + radius + 1):
if x >= 0 and x < height and y >= 0 and y < width:
neighbors.append(image[x, y])
# 计算局部二值模式
lbp_value = 0
for neighbor in neighbors:
if neighbor >= center_pixel:
lbp_value |= 1 << (len(neighbors) - 1)
len(neighbors) - 1
# 更新局部二值模式图像
lbp_image[i, j] = lbp_value
return lbp_image
```
#### 3.2.3 Gabor滤波器
Gabor 滤波器是一个基于结构的方法,它模拟了人类视觉系统的简单细胞。Gabor 滤波器具有特定的方向性和频率,可以提取图像中具有相应方向和频率的纹理特征。
```python
import numpy as np
import cv2
def compute_gabor_features(image, orientations=8, frequencies=4):
"""计算 Gabor 特征。
Args:
image (ndarray): 输入图像。
orientations (int, optional): 方向数。默认为 8。
frequencies (int, optional): 频率数。默认为 4。
Returns:
ndarray: Gabor 特征。
"""
# 创建 Gabor 滤波器
gabor_filters = []
for orientation in range(orientations):
for frequency in range(frequencies):
kernel = cv2.getGaborKernel((11, 11), 1.5, orientation * np.pi / orientations, frequency + 1, 0.5, 0, ktype=cv2.CV_32F)
gabor_filters.append(kernel)
# 过滤图像
gabor_features = []
for kernel in gabor_filters:
filtered_image = cv2.filter2D(image, cv2.CV_32F, kernel)
gabor_features.append(filtered_image)
return np.array(gabor_features)
```
# 4. 图像特征提取实践
### 4.1 基于边缘检测的图像特征提取
#### 4.1.1 边缘检测算法的实现
**Sobel算子**
```python
import cv2
import numpy as np
def sobel_edge_detection(image):
"""
使用Sobel算子进行边缘检测
参数:
image: 输入图像,灰度图像
返回:
edges: 边缘检测后的图像
"""
# 计算x方向和y方向的梯度
Gx = cv2.Sobel(image, cv2.CV_64F, 1, 0, ksize=3)
Gy = cv2.Sobel(image, cv2.CV_64F, 0, 1, ksize=3)
# 计算梯度幅值
edges = np.sqrt(Gx**2 + Gy**2)
# 归一化边缘幅值到[0, 255]范围
edges = np.uint8(edges / np.max(edges) * 255)
return edges
```
**Canny算子**
```python
import cv2
def canny_edge_detection(image):
"""
使用Canny算子进行边缘检测
参数:
image: 输入图像,灰度图像
返回:
edges: 边缘检测后的图像
"""
# 使用Canny算子进行边缘检测
edges = cv2.Canny(image, 100, 200)
return edges
```
#### 4.1.2 边缘特征的提取和描述
边缘特征通常使用以下方法提取和描述:
* **边缘点:**边缘点是边缘上的像素,其梯度幅值高于某个阈值。
* **边缘线:**边缘线是由相邻边缘点连接形成的线段。
* **边缘梯度:**边缘梯度是边缘点处的梯度向量,表示边缘的方向和强度。
* **边缘曲率:**边缘曲率是边缘线沿其长度的弯曲程度。
### 4.2 基于纹理分析的图像特征提取
#### 4.2.1 纹理分析算法的实现
**灰度共生矩阵**
```python
import numpy as np
def gray_level_cooccurrence_matrix(image, distance=1, angle=0):
"""
计算灰度共生矩阵
参数:
image: 输入图像,灰度图像
distance: 像素之间的距离
angle: 方向,0表示水平,1表示垂直
返回:
glcm: 灰度共生矩阵
"""
# 获取图像尺寸
height, width = image.shape
# 初始化灰度共生矩阵
glcm = np.zeros((256, 256), dtype=np.uint32)
# 遍历图像中的每个像素
for i in range(height):
for j in range(width):
# 计算当前像素与相邻像素的灰度差
if angle == 0:
diff = image[i, j] - image[i, j + distance]
elif angle == 1:
diff = image[i, j] - image[i + distance, j]
# 更新灰度共生矩阵
glcm[image[i, j], image[i, j] + diff] += 1
return glcm
```
**局部二值模式**
```python
import numpy as np
def local_binary_pattern(image, radius=3, n_points=8):
"""
计算局部二值模式
参数:
image: 输入图像,灰度图像
radius: 邻域半径
n_points: 邻域中的点数
返回:
lbp: 局部二值模式图像
"""
# 获取图像尺寸
height, width = image.shape
# 初始化局部二值模式图像
lbp = np.zeros((height, width), dtype=np.uint8)
# 遍历图像中的每个像素
for i in range(height):
for j in range(width):
# 计算邻域中的灰度值
neighbors = image[i-radius:i+radius+1, j-radius:j+radius+1]
# 计算中心像素的灰度值
center = image[i, j]
# 生成局部二值模式代码
code = 0
for k in range(n_points):
if neighbors[k] >= center:
code |= 1 << k
# 更新局部二值模式图像
lbp[i, j] = code
return lbp
```
#### 4.2.2 纹理特征的提取和描述
纹理特征通常使用以下方法提取和描述:
* **纹理能量:**纹理能量是灰度共生矩阵对角线元素之和,表示纹理的均匀程度。
* **纹理对比度:**纹理对比度是灰度共生矩阵中最大值和最小值之差,表示纹理的对比度。
* **纹理相关性:**纹理相关性是灰度共生矩阵中相邻元素的协方差,表示纹理的相似性。
* **纹理熵:**纹理熵是灰度共生矩阵中每个元素的概率分布的熵,表示纹理的复杂程度。
# 5. 图像特征提取应用
### 5.1 图像分类
#### 5.1.1 图像分类的原理
图像分类是将图像分配到预定义类别的一种计算机视觉任务。其基本原理是提取图像中的特征,并使用这些特征来训练分类器。训练好的分类器可以对新图像进行预测,将它们分配到正确的类别中。
#### 5.1.2 基于图像特征的分类方法
基于图像特征的分类方法通常遵循以下步骤:
1. **特征提取:**从图像中提取相关特征,如边缘、纹理和颜色。
2. **特征选择:**选择对分类任务最具判别力的特征。
3. **分类器训练:**使用选定的特征训练分类器,如支持向量机 (SVM) 或神经网络。
4. **分类:**将新图像输入训练好的分类器,预测其类别。
### 5.2 目标检测
#### 5.2.1 目标检测的原理
目标检测是识别和定位图像中特定目标的计算机视觉任务。其基本原理是提取图像中的特征,并使用这些特征来训练检测器。训练好的检测器可以在新图像中定位目标,并为每个目标提供边界框。
#### 5.2.2 基于图像特征的目标检测方法
基于图像特征的目标检测方法通常遵循以下步骤:
1. **特征提取:**从图像中提取相关特征,如边缘、纹理和颜色。
2. **滑动窗口:**在图像上滑动一个窗口,并提取窗口内的特征。
3. **分类器应用:**使用训练好的分类器对窗口内的特征进行分类,判断窗口内是否包含目标。
4. **非极大值抑制:**消除重叠边界框,只保留最具置信度的边界框。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《图像分析》专栏深入探究图像分析的方方面面,从基础概念到前沿应用。专栏涵盖广泛主题,包括图像处理算法、图像特征提取、深度学习、图像模糊处理、图像噪声去除、图像增强技术、图像分割、图像配准、图像分析在医疗诊断、工业检测、安全监控、无人驾驶和零售业中的应用,以及图像分析性能优化、大数据处理、伦理与隐私问题和未来趋势。无论您是图像分析新手还是经验丰富的从业者,本专栏都能为您提供丰富的知识和见解,帮助您掌握图像分析的奥秘,推动您的研究或应用项目取得成功。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
Thaiphoon Burner 7.1.1.0故障排除指南

# 摘要
Thaiphoon Burner是一款内存信息编辑工具,广泛用于故障排查和硬件兼容性调整。本文综合介绍了Thaiphoon Burner的基本概念、故障诊断前的准备工作、故障诊断技巧、软件和硬件故障处理,以及高级故障排除技巧。文章详细阐述了硬件检查、软件环境设置、数据备份的重要性,解释了
【IBM V7000性能优化秘籍】:深入解析,全面提升存储性能!

# 摘要
本文针对IBM V7000存储系统进行了全面的性能优化分析。首先概述了存储系统的结构和关键性能指标,然后深入探讨了优化存储性能的理论基础,包括性能瓶颈分析和资源管理策略。在硬件层面,本文详细介绍了配置最佳实践、管理存储阵列的技巧,以及硬件升级和维护的策略。软件层面的优化涉及到存储池和卷、文件系统、数据管理以及系统监控和故障排除。最后,
【欧姆龙PLC编程进阶】:高级指令应用详解
# 摘要
本文回顾了欧姆龙PLC(可编程逻辑控制器)编程的基础知识,并深入探讨了高级指令的理论基础与分类。章节内容涵盖数据处理、控制类高级指令及其在实现复杂逻辑控制、数据处理和运动控制中的应用实例。文章还讨论了高级指令的调试技巧、性能优化和错误处理方法。最后,通过案例研究,分析了高级指令在工业自动化和智
内存管理与资源释放策略:CANoe .NET编程进阶指南

# 摘要
本文首先概述了内存管理的基础知识,并介绍了CANoe .NET环境下的内存管理机制。通过深入探讨内存管理的理论基础,包括内存分配、释放、垃圾回收以及内存泄漏的诊断与优化策略,本文强调了资源管理在软件开发中的重要性。同时,文章详细分析了在CANoe .NET环境下如何实施资源自动管理以及手动释放的最佳实践,以及如何使用监控工具预防和修复内存泄漏。此外,本
【移动导航应用开发:用户体验优化10大策略】:专家分享
# 摘要
本文从用户需求分析、界面设计优化、功能优化、性能与稳定性提升、用户反馈处理以及未来趋势探索等多个维度,系统地探讨了移动导航应用的开发与优化。通过对用户心理和操作习惯的研究,本文提出界面设计应遵循简洁性和直觉操作原则,并强调颜色、图标和文字等设计元素的易用性。在功能优化方面,本文探讨了实时路况更新、个性化路线规划和离线导
信息管理系统开发实战:敏捷与传统方法的完美融合
# 摘要
随着信息技术的快速发展,信息管理系统开发方法论也在不断演变。本文首先概述了信息管理系统开发的基本概念,随后深入探讨了敏捷开发方法论的核心价值观与原则,技术实践如测试驱动开发(TDD)、持续集成与持续部署(CI/CD)、用户故事和敏捷迭代等,以及敏捷项目管理工具与方法。接着,本文分析了传统开发方法的模型、项目管理和质量保证手段,以及相关开发工具和
【云服务下的运输配置】:提升配置灵活性的云原生实践
# 摘要
云服务与运输配置已成为现代信息技术架构的核心组成部分,对企业的敏捷性和竞争力具有显著影响。本文首先介绍了云服务的架构及其关键特点,对比了IaaS, PaaS, SaaS等不同服务模型。随后,本文探讨了云原生配置管理理论,着重于其关键概念、优势以及在敏捷性、可扩展性方面的贡献。接着,通过分析
【企业应用集成(EAI)完全攻略】:新手入门到高级实践
# 摘要
企业应用集成(EAI)是企业信息化发展的关键环节,通过集成不同的企业应用,实现业务流程的高效协同与数据的一致性。本文从EAI的概念、理论基础讲起,深入分析了EAI的核心集成模式、数据转换与映射技术。接着,探讨了EAI中间件技术、集成工具以及企业服务总线(ESB)的实践应用。文章进一步结合业务流程管理(BPM)、
【Mockito与Spring Boot无缝集成】:简化测试配置的黄金法则

# 摘要
本文详细探讨了Mockito与Spring Boot集成的过程及其在软件测试中的应用,为开发人员提供了一套完整的单元测试和集成测试策略。首先介绍了单元测试的基础知识和Mockito的基本使用方法,随后深入讲解了在Spring Boot
GAMIT数据处理基础:快速掌握GAMIT的使用技巧(10个步骤让你成为专家)

# 摘要
本文深入介绍了GAMIT数据处理软件的基础知识、安装配置、基础操作流程以及高级操作技巧。首先,概述了GAMIT数据处理的基本概念和系统需求,并详细说明了安装步骤、文件类型和目录结构。随后,本文阐述了GAMIT的基础操作流程,包括数据的准备、预处理、处理与分析,以及结果的输出与后处理。进阶内容涵盖了自定义模型、参数调整、处理策略优化以及脚本自动化和批处理。最后,通
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )