【STM32单片机程序开发入门秘籍】:零基础到精通的快速上手指南
发布时间: 2024-07-05 14:45:58 阅读量: 90 订阅数: 72 

基于STM32的嵌入式开发入门教程:从零开始的实践指南.zip
# 1. STM32单片机简介和开发环境搭建
STM32单片机是意法半导体(STMicroelectronics)公司生产的一系列基于ARM Cortex-M内核的32位微控制器。STM32单片机以其高性能、低功耗和丰富的外设而闻名,广泛应用于工业控制、汽车电子、医疗设备和消费电子等领域。
本章将介绍STM32单片机的基本架构、特点和开发环境搭建。我们将了解STM32单片机的硬件架构,包括Cortex-M内核、外设和存储器。此外,我们还将介绍STM32单片机的开发环境,包括Keil MDK和GCC工具链的安装和配置。
# 2.1 STM32单片机架构和寄存器
### 2.1.1 Cortex-M系列内核架构
STM32单片机采用基于ARM Cortex-M系列内核,该内核专为嵌入式系统设计,具有低功耗、高性能的特点。Cortex-M系列内核架构主要包括以下组件:
- **程序计数器(PC)**:存储当前正在执行的指令的地址。
- **堆栈指针(SP)**:指向当前堆栈顶部的地址。
- **寄存器文件**:存储数据和地址的寄存器组。
- **异常处理单元(NVIC)**:处理中断和异常。
- **调试模块**:支持调试和跟踪。
### 2.1.2 STM32单片机外设寄存器
STM32单片机集成了丰富的片上外设,这些外设通过寄存器进行配置和控制。外设寄存器通常分为以下几类:
- **控制寄存器**:用于配置外设的基本功能和操作模式。
- **状态寄存器**:反映外设的当前状态,例如中断标志和错误标志。
- **数据寄存器**:用于存储和传输数据。
**寄存器寻址方式**
STM32单片机的寄存器可以通过以下方式寻址:
- **直接寻址**:直接使用寄存器名称。
- **间接寻址**:使用寄存器指针或偏移量来间接访问寄存器。
- **位带寻址**:通过访问寄存器的位带地址来访问寄存器中的单个位。
**寄存器操作**
寄存器操作主要通过以下指令进行:
- **加载指令**:将数据加载到寄存器中。
- **存储指令**:将寄存器中的数据存储到内存中。
- **算术和逻辑指令**:对寄存器中的数据进行算术和逻辑运算。
- **位操作指令**:对寄存器中的单个位进行操作。
**代码示例:**
```c
// 加载数据到寄存器 R0
LDR R0, =0x1234
// 将寄存器 R0 中的数据存储到地址 0x1000
STR R0, [R1, #0x1000]
// 将寄存器 R0 和 R1 中的数据相加,结果存储到寄存器 R2
ADD R2, R0, R1
```
# 3. STM32单片机外设编程**
### 3.1 GPIO编程
#### 3.1.1 GPIO配置和操作
GPIO(General Purpose Input/Output)是STM32单片机上一种通用的输入/输出接口,可以配置为输入或输出模式,用于控制外部设备或接收外部信号。
**GPIO配置**
GPIO配置主要包括以下步骤:
1. **使能GPIO时钟:**在程序中使用RCC_APB2PeriphClockCmd()函数使能GPIO外设时钟。
2. **配置GPIO引脚:**使用GPIO_Init()函数配置GPIO引脚的模式、速率和输出类型。
3. **设置GPIO引脚:**使用GPIO_SetBits()或GPIO_ResetBits()函数设置GPIO引脚的输出电平。
4. **读取GPIO引脚:**使用GPIO_ReadInputDataBit()或GPIO_ReadInputData()函数读取GPIO引脚的输入电平。
**代码示例:**
```c
// 使能GPIOA时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
// 配置GPIOA引脚PA0为输出模式
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// 设置GPIOA引脚PA0输出高电平
GPIO_SetBits(GPIOA, GPIO_Pin_0);
```
#### 3.1.2 中断处理
GPIO中断可以用于检测外部信号的变化,从而触发相应的处理程序。
**GPIO中断配置**
GPIO中断配置主要包括以下步骤:
1. **使能GPIO中断:**在程序中使用EXTI_Init()函数使能GPIO中断。
2. **配置中断触发方式:**使用EXTI_SetTrigger()函数配置GPIO中断触发方式(上升沿、下降沿或双沿)。
3. **配置中断优先级:**使用NVIC_SetPriority()函数配置GPIO中断优先级。
4. **注册中断服务函数:**使用NVIC_EnableIRQ()函数注册GPIO中断服务函数。
**代码示例:**
```c
// 使能GPIOA中断
EXTI_InitTypeDef EXTI_InitStructure;
EXTI_InitStructure.EXTI_Line = EXTI_Line0;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising;
EXTI_Init(&EXTI_InitStructure);
// 配置GPIOA中断优先级
NVIC_SetPriority(EXTI0_IRQn, 0);
// 注册GPIOA中断服务函数
NVIC_EnableIRQ(EXTI0_IRQn);
```
### 3.2 定时器编程
#### 3.2.1 定时器配置和操作
定时器是STM32单片机上一种用于产生定时脉冲或测量时间间隔的外设。
**定时器配置**
定时器配置主要包括以下步骤:
1. **使能定时器时钟:**在程序中使用RCC_APB1PeriphClockCmd()函数使能定时器外设时钟。
2. **配置定时器模式:**使用TIM_TimeBaseInit()函数配置定时器模式(向上计数、向下计数或中心对齐模式)。
3. **设置定时器时钟源:**使用TIM_PrescalerConfig()函数设置定时器时钟源(内部时钟、外部时钟或时钟滤波器)。
4. **设置定时器周期:**使用TIM_SetAutoreload()函数设置定时器周期。
5. **使能定时器:**使用TIM_Cmd()函数使能定时器。
**代码示例:**
```c
// 使能TIM2时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
// 配置TIM2为向上计数模式
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_TimeBaseStructure.TIM_Period = 10000; // 设置定时器周期为10000
TIM_TimeBaseStructure.TIM_Prescaler = 72; // 设置定时器时钟源为72MHz
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; // 设置时钟分频系数为1
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
// 使能TIM2
TIM_Cmd(TIM2, ENABLE);
```
#### 3.2.2 PWM输出
PWM(Pulse Width Modulation)是一种调制输出脉冲宽度以控制输出功率或速度的技术。
**PWM配置**
PWM配置主要包括以下步骤:
1. **配置定时器为PWM模式:**使用TIM_OCInit()函数配置定时器为PWM模式。
2. **设置PWM输出通道:**使用TIM_OCxInit()函数设置PWM输出通道(TIM_Channel_1、TIM_Channel_2等)。
3. **设置PWM占空比:**使用TIM_SetComparex()函数设置PWM占空比。
4. **使能PWM输出:**使用TIM_OCxPreloadConfig()函数使能PWM输出。
**代码示例:**
```c
// 配置TIM2为PWM模式
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; // 设置PWM模式为PWM1
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; // 使能PWM输出
TIM_OCInitStructure.TIM_Pulse = 5000; // 设置PWM占空比为50%
TIM_OC1Init(TIM2, &TIM_OCInitStructure);
// 使能PWM输出
TIM_OC1PreloadConfig(TIM2, TIM_OCPreload_Enable);
```
### 3.3 ADC编程
#### 3.3.1 ADC配置和操作
ADC(Analog-to-Digital Converter)是一种将模拟信号转换为数字信号的外设。
**ADC配置**
ADC配置主要包括以下步骤:
1. **使能ADC时钟:**在程序中使用RCC_APB2PeriphClockCmd()函数使能ADC外设时钟。
2. **配置ADC通道:**使用ADC_RegularChannelConfig()函数配置ADC通道(ADC_Channel_1、ADC_Channel_2等)。
3. **配置ADC采样时间:**使用ADC_SampleTimeConfig()函数配置ADC采样时间。
4. **使能ADC:**使用ADC_Cmd()函数使能ADC。
**代码示例:**
```c
// 使能ADC1时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1, ENABLE);
// 配置ADC1通道1
ADC_RegularChannelConfig(ADC1, ADC_Channel_1, 1, ADC_SampleTime_55Cycles5);
// 使能ADC1
ADC_Cmd(ADC1, ENABLE);
```
#### 3.3.2 数据采集和处理
**数据采集**
ADC数据采集主要包括以下步骤:
1. **启动ADC转换:**使用ADC_SoftwareStartConv()函数启动ADC转换。
2. **等待转换完成:**使用ADC_GetFlagStatus()函数等待ADC转换完成。
3. **读取ADC数据:**使用ADC_GetConversionValue()函数读取ADC数据。
**数据处理**
ADC数据处理主要包括以下步骤:
1. **校准ADC数据:**使用ADC_GetCalibrationValue()函数校准ADC数据。
2. **转换ADC数据:**使用公式将ADC数据转换为实际电压值。
3. **滤波ADC数据:**使用滤波算法滤除ADC数据中的噪声。
**代码示例:**
```c
// 启动ADC1转换
ADC_SoftwareStartConv(ADC1);
// 等待转换完成
while(!ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC));
// 读取ADC1数据
uint16_t adcData = ADC_GetConversionValue(ADC1);
// 转换ADC数据
float voltage = adcData * 3.3 / 4096;
// 滤波ADC数据
float filteredVoltage = 0.9 * filteredVoltage + 0.1 * voltage;
```
# 4. STM32单片机通信编程**
**4.1 UART编程**
UART(通用异步收发传输器)是一种串行通信接口,用于在两个设备之间传输数据。它广泛用于各种嵌入式系统中,包括STM32单片机。
**4.1.1 UART配置和操作**
STM32单片机具有多个UART外设,每个外设都有自己的寄存器集。要配置UART,需要设置以下寄存器:
- **CR1寄存器:**配置UART的通信模式、波特率和数据格式。
- **CR2寄存器:**配置UART的中断和流控制。
- **BRR寄存器:**设置UART的波特率。
- **DR寄存器:**用于发送和接收数据。
**代码块:**
```c
// 初始化UART
void UART_Init(void) {
// 设置CR1寄存器
RCC->APB2ENR |= RCC_APB2ENR_USART1EN; // 使能UART1时钟
USART1->CR1 = USART_CR1_UE | USART_CR1_TE | USART_CR1_RE; // 使能UART、发送器和接收器
// 设置CR2寄存器
USART1->CR2 = 0; // 默认配置
// 设置BRR寄存器
USART1->BRR = 0x683; // 设置波特率为9600
// 使能UART中断
USART1->CR1 |= USART_CR1_RXNEIE; // 使能接收中断
}
```
**逻辑分析:**
* `RCC->APB2ENR |= RCC_APB2ENR_USART1EN;`:使能UART1时钟。
* `USART1->CR1 = USART_CR1_UE | USART_CR1_TE | USART_CR1_RE;`:使能UART、发送器和接收器。
* `USART1->CR2 = 0;`:使用默认配置。
* `USART1->BRR = 0x683;`:设置波特率为9600。
* `USART1->CR1 |= USART_CR1_RXNEIE;`:使能接收中断。
**4.1.2 数据收发**
配置UART后,可以使用以下函数发送和接收数据:
- **HAL_UART_Transmit():**发送数据。
- **HAL_UART_Receive():**接收数据。
**代码块:**
```c
// 发送数据
void UART_SendData(uint8_t *data, uint16_t len) {
HAL_UART_Transmit(&huart1, data, len, 1000); // 发送数据,超时时间为1000ms
}
// 接收数据
void UART_ReceiveData(uint8_t *data, uint16_t len) {
HAL_UART_Receive(&huart1, data, len, 1000); // 接收数据,超时时间为1000ms
}
```
**逻辑分析:**
* `HAL_UART_Transmit(&huart1, data, len, 1000);`:发送数据,超时时间为1000ms。
* `HAL_UART_Receive(&huart1, data, len, 1000);`:接收数据,超时时间为1000ms。
**4.2 I2C编程**
I2C(Inter-Integrated Circuit)是一种串行通信接口,用于连接多个设备。它广泛用于嵌入式系统中,包括STM32单片机。
**4.2.1 I2C配置和操作**
STM32单片机具有多个I2C外设,每个外设都有自己的寄存器集。要配置I2C,需要设置以下寄存器:
- **CR1寄存器:**配置I2C的通信模式和时钟。
- **CR2寄存器:**配置I2C的中断和流控制。
- **TRISE寄存器:**设置I2C的上升时间。
- **OAR1寄存器:**设置I2C的从机地址。
**代码块:**
```c
// 初始化I2C
void I2C_Init(void) {
// 设置CR1寄存器
RCC->APB1ENR |= RCC_APB1ENR_I2C1EN; // 使能I2C1时钟
I2C1->CR1 = I2C_CR1_PE; // 使能I2C
// 设置CR2寄存器
I2C1->CR2 = 0; // 默认配置
// 设置TRISE寄存器
I2C1->TRISE = 0x09; // 设置上升时间
// 设置OAR1寄存器
I2C1->OAR1 = 0x0A; // 设置从机地址为0x0A
}
```
**逻辑分析:**
* `RCC->APB1ENR |= RCC_APB1ENR_I2C1EN;`:使能I2C1时钟。
* `I2C1->CR1 = I2C_CR1_PE;`:使能I2C。
* `I2C1->CR2 = 0;`:使用默认配置。
* `I2C1->TRISE = 0x09;`:设置上升时间。
* `I2C1->OAR1 = 0x0A;`:设置从机地址为0x0A。
**4.2.2 从机和主机模式**
I2C设备可以工作在从机模式或主机模式。
* **从机模式:**响应主机的请求,接收或发送数据。
* **主机模式:**发起通信,向从机发送或接收数据。
**代码块:**
```c
// 从机模式
void I2C_SlaveMode(void) {
I2C1->CR1 |= I2C_CR1_ACK; // 使能应答
while (1) {
// 等待主机请求
while (!(I2C1->SR1 & I2C_SR1_ADDR));
// 接收数据
uint8_t data = I2C1->DR;
// 发送应答
I2C1->CR1 |= I2C_CR1_ACK;
}
}
// 主机模式
void I2C_MasterMode(void) {
// 发送启动条件
I2C1->CR1 |= I2C_CR1_START;
// 等待启动条件发送完成
while (!(I2C1->SR1 & I2C_SR1_SB));
// 发送从机地址
I2C1->DR = 0x0A; // 从机地址为0x0A
// 等待从机应答
while (!(I2C1->SR1 & I2C_SR1_ADDR));
// 发送数据
I2C1->DR = 0x12;
// 等待数据发送完成
while (!(I2C1->SR1 & I2C_SR1_TXE));
// 发送停止条件
I2C1->CR1 |= I2C_CR1_STOP;
}
```
**逻辑分析:**
* **从机模式:**
* `I2C1->CR1 |= I2C_CR1_ACK;`:使能应答。
* `while (!(I2C1->SR1 & I2C_SR1_ADDR));`:等待主机请求。
* `uint8_t data = I2C1->DR;`:接收数据。
* `I2C1->CR1 |= I2C_CR1_ACK;`:发送应答。
* **主机模式:**
* `I2C1->CR1 |= I2C_CR1_START;`:发送启动条件。
* `while (!(I2C1->SR1 & I2C_SR1_SB));`:等待启动条件发送完成。
* `I2C1->DR = 0x0A;`:发送从机地址。
* `while (!(I2C1->SR1 & I2C_SR1_ADDR));`:等待从机应答。
* `I2C1->DR = 0x12;`:发送数据。
* `while (!(I2C1->SR1 & I2C_SR1_TXE));`:等待数据发送完成。
* `I2C1->CR1 |= I2C_CR1_STOP;`:发送停止条件。
**4.3 SPI编程**
SPI(串行外围接口)是一种高速
# 5.1 实时操作系统(RTOS)
### 5.1.1 RTOS 简介和选择
**实时操作系统(RTOS)**是一种专门设计用于管理多任务并确保实时响应的软件。在嵌入式系统中,RTOS 对于协调不同任务、管理资源和处理中断至关重要。
RTOS 提供以下主要功能:
* **任务管理:**创建、调度和管理多个任务。
* **资源管理:**分配和管理共享资源,例如内存、外设和数据结构。
* **中断处理:**快速响应硬件中断,并以可预测的方式处理它们。
* **同步和通信:**提供机制,以便任务可以同步其操作并交换数据。
选择合适的 RTOS 对于嵌入式系统至关重要。因素包括:
* **实时性:**RTOS 必须能够以可预测的方式满足实时要求。
* **内核大小:**RTOS 的内核大小应尽可能小,以减少内存占用。
* **功能:**RTOS 应提供必要的特性和功能,以满足应用程序的需求。
* **文档和支持:**良好的文档和技术支持对于开发和维护基于 RTOS 的系统至关重要。
### 5.1.2 FreeRTOS 移植和使用
**FreeRTOS** 是一个流行的开源 RTOS,以其小巧、高效和可移植性而闻名。它广泛用于嵌入式系统,包括 STM32 单片机。
移植 FreeRTOS 到 STM32 单片机涉及以下步骤:
1. **创建 FreeRTOS 配置文件:**指定系统配置,例如任务数量、堆栈大小和中断优先级。
2. **初始化硬件:**配置时钟、中断和外设,以支持 FreeRTOS 操作。
3. **创建任务:**定义任务的代码和堆栈空间。
4. **创建队列和信号量:**用于任务同步和通信。
5. **启动调度程序:**开始 FreeRTOS 调度循环,管理任务执行。
以下代码示例展示了如何创建和启动一个 FreeRTOS 任务:
```c
#include "FreeRTOS.h"
#include "task.h"
void task_function(void *pvParameters) {
// 任务代码
}
int main(void) {
// 初始化硬件
// 创建任务
xTaskCreate(task_function, "Task 1", 128, NULL, 1, NULL);
// 启动调度程序
vTaskStartScheduler();
// 主循环(调度程序运行后不会执行)
while (1) {
// 空闲任务代码
}
}
```
通过使用 FreeRTOS,嵌入式系统开发人员可以创建复杂的多任务应用程序,同时确保实时响应和资源管理。
# 6. STM32单片机项目实战
### 6.1 LED闪烁程序
**代码:**
```c
#include "stm32f10x.h"
int main(void)
{
// 初始化GPIOC时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);
// 配置GPIOC第13引脚为输出模式
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure);
while (1)
{
// 设置GPIOC第13引脚为高电平
GPIO_SetBits(GPIOC, GPIO_Pin_13);
// 延时1秒
Delay(1000);
// 设置GPIOC第13引脚为低电平
GPIO_ResetBits(GPIOC, GPIO_Pin_13);
// 延时1秒
Delay(1000);
}
}
```
**说明:**
* 该程序使用GPIOC第13引脚控制LED灯的闪烁。
* 程序首先初始化GPIOC时钟,然后配置GPIOC第13引脚为输出模式。
* 在主循环中,程序交替设置GPIOC第13引脚为高电平和低电平,从而控制LED灯的闪烁。
### 6.2 按键输入程序
**代码:**
```c
#include "stm32f10x.h"
int main(void)
{
// 初始化GPIOA时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
// 配置GPIOA第0引脚为输入模式
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_In_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
while (1)
{
// 读取GPIOA第0引脚电平
uint8_t key_state = GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_0);
// 如果按键按下(电平为低)
if (key_state == 0)
{
// 执行按键按下操作
// ...
}
}
}
```
**说明:**
* 该程序使用GPIOA第0引脚检测按键输入。
* 程序首先初始化GPIOA时钟,然后配置GPIOA第0引脚为输入模式。
* 在主循环中,程序不断读取GPIOA第0引脚电平,如果电平为低,则表示按键按下,程序执行相应的操作。
### 6.3 温度传感器采集程序
**代码:**
```c
#include "stm32f10x.h"
int main(void)
{
// 初始化ADC时钟和GPIOA时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1 | RCC_APB2Periph_GPIOA, ENABLE);
// 配置GPIOA第0引脚为模拟输入模式
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// 配置ADC1
ADC_InitTypeDef ADC_InitStructure;
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent;
ADC_InitStructure.ADC_ScanConvMode = DISABLE;
ADC_InitStructure.ADC_ContinuousConvMode = ENABLE;
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None;
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;
ADC_InitStructure.ADC_NbrOfChannel = 1;
ADC_Init(ADC1, &ADC_InitStructure);
// 使能ADC1
ADC_Cmd(ADC1, ENABLE);
// ADC1校准
ADC_ResetCalibration(ADC1);
while (ADC_GetResetCalibrationStatus(ADC1));
ADC_StartCalibration(ADC1);
while (ADC_GetCalibrationStatus(ADC1));
while (1)
{
// 启动ADC1转换
ADC_SoftwareStartConvCmd(ADC1, ENABLE);
// 等待转换完成
while (!ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC));
// 读取转换结果
uint16_t adc_value = ADC_GetConversionValue(ADC1);
// 根据adc_value计算温度
float temperature = (float)adc_value * 3.3 / 4096 * 100;
// 输出温度
// ...
}
}
```
**说明:**
* 该程序使用ADC1和GPIOA第0引脚采集温度传感器数据。
* 程序首先初始化ADC1时钟和GPIOA时钟,然后配置GPIOA第0引脚为模拟输入模式。
* 接着配置ADC1,包括模式、转换模式、连续转换模式、触发源、数据对齐方式和通道数量。
* 程序使能ADC1,进行校准,然后启动ADC1转换。
* 在主循环中,程序不断启动ADC1转换,等待转换完成,读取转换结果,并根据转换结果计算温度,最后输出温度。
### 6.4 蓝牙通信程序
**代码:**
```c
#include "stm32f10x.h"
#include "stm32f10x_usart.h"
#include "stm32f10x_bluetooth.h"
int main(void)
{
// 初始化USART1时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
// 配置USART1
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1, &USART_InitStructure);
// 使能USART1
USART_Cmd(USART1, ENABLE);
// 初始化蓝牙模块
BT_Init();
while (1)
{
// 从蓝牙模块接收数据
uint8_t data = BT_ReceiveData();
// 处理接收到的数据
// ...
// 向蓝牙模块发送数据
BT_SendData(data);
}
}
```
**说明:**
* 该程序使用USART1和蓝牙模块进行通信。
* 程序首先初始化USART1时钟,然后配置USART1,包括波特率、数据位、停止位、校验位、流控方式和工作模式。
* 接着初始化蓝牙模块。
* 在主循环中,程序不断从蓝牙模块接收数据,处理接收到的数据,然后向蓝牙模块发送数据。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《STM32单片机程序教程》专栏是STM32单片机开发人员的宝贵资源。它涵盖了从入门到高级的广泛主题,包括编程入门、DMA、CAN总线、USB通信、项目实战、调试技巧、优化编程、应用案例、开发环境配置、库函数详解、固件升级、安全编程、故障分析、性能优化、多任务编程、图形界面开发、传感器编程、电机控制、图像处理和人工智能应用。无论您是初学者还是经验丰富的开发人员,本专栏都提供了全面而深入的指导,帮助您掌握STM32单片机的各个方面,并将其应用于各种实际项目中。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
紧急揭秘!防止Canvas转换中透明区域变色的5大技巧
# 摘要
Canvas作为Web图形API,广泛应用于现代网页设计与交互中。本文从Canvas转换技术的基本概念入手,深入探讨了在渲染过程中透明区域变色的理论基础和实践解决方案。文章详细解析了透明度和颜色模型,渲染流程以及浏览器渲染差异,并针对性地提供了预防透明区域变色的技巧。通过对Canvas上下文优化
超越MFCC:BFCC在声学特征提取中的崛起

# 摘要
声学特征提取是语音和音频处理领域的核心,对于提升识别准确率和系统的鲁棒性至关重要。本文首先介绍了声学特征提取的原理及应用,着重探讨
Flutter自定义验证码输入框实战:提升用户体验的开发与优化

# 摘要
本文详细介绍了在Flutter框架中实现验证码输入框的设计与开发流程。首先,文章探讨了验证码输入框在移动应用中的基本实现,随后深入到前端设计理论,强调了用户体验的重
光盘刻录软件大PK:10个最佳工具,找到你的专属刻录伙伴
# 摘要
本文全面介绍了光盘刻录技术,从技术概述到具体软件选择标准,再到实战对比和进阶优化技巧,最终探讨了在不同应用场景下的应用以及未来发展趋势。在选择光盘刻录软件时,本文强调了功能性、用户体验、性能与稳定性的重要性。此外,本文还提供了光盘刻录的速度优化、数据安全保护及刻录后验证的方法,并探讨了在音频光盘制作、数据备份归档以及多媒体项目中的应用实例。最后,文章展望了光盘刻录技术的创
【FANUC机器人接线实战教程】:一步步教你完成Process IO接线的全过程
# 摘要
本文系统地介绍了FANUC机器人接线的基础知识、操作指南以及故障诊断与解决策略。首先,章节一和章节二深入讲解了Process IO接线原理,包括其优势、硬件组成、电气接线基础和信号类型。随后,在第三章中,提供了详细的接线操作指南,从准备工作到实际操作步骤,再到安全操作规程与测试,内容全面而细致。第四章则聚焦于故障诊断与解决,提供了一系列常见问题的分析、故障排查步骤与技巧,以及维护和预防措施
ENVI高光谱分析入门:3步掌握波谱识别的关键技巧

# 摘要
本文全面介绍了ENVI高光谱分析软件的基础操作和高级功能应用。第一章对ENVI软件进行了简介,第二章详细讲解了ENVI用户界面、数据导入预处理、图像显示与分析基础。第三章讨论了波谱识别的关键步骤,包括波谱特征提取、监督与非监督分类以及分类结果的评估与优化。第四章探讨了高级波谱分析技术、大数据环境下的高光谱处理以及ENVI脚本
ISA88.01批量控制核心指南:掌握制造业自动化控制的7大关键点

# 摘要
本文详细介绍了ISA88.01批量控制标准的理论基础和实际应用。首先,概述了ISA88.01标准的结构与组件,包括基本架构、核心组件如过程模块(PM)、单元模块(UM)
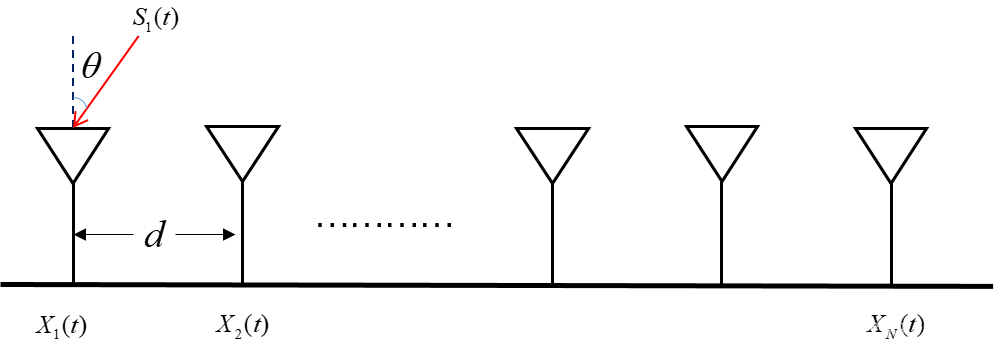
【均匀线阵方向图优化手册】:提升天线性能的15个实战技巧
# 摘要
本文系统地介绍了均匀线阵天线的基础知识、方向图优化理论基础、优化实践技巧、系统集成与测试流程,以及创新应用。文章首先概述了均匀线阵天线的基本概念和方向图的重要性,然后
STM32F407 USB通信全解:USB设备开发与调试的捷径
# 摘要
本论文深入探讨了STM32F407微控制器在USB通信领域的应用,涵盖了从基础理论到高级应用的全方位知识体系。文章首先对USB通信协议进行了详细解析,并针对STM32F407的USB硬件接口特性进行了介绍。随后,详细阐述了USB设备固件开发流程和数据流管理,以及USB通信接口编程的具体实现。进一步地,针对USB调试技术和故障诊断、性能优化进行了系统性分析。在高级应用部分,重点介绍了USB主
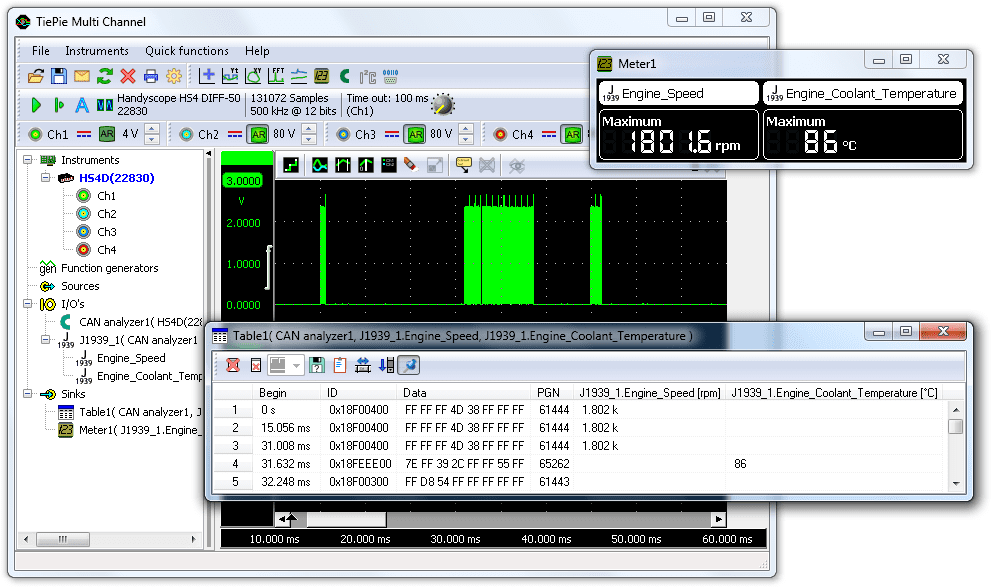
车载网络诊断新趋势:SAE-J1939-73在现代汽车中的应用
# 摘要
随着汽车电子技术的发展,车载网络诊断技术变得日益重要。本文首先概述了车载网络技术的演进和SAE-J1939标准及其子标准SAE-J1939-73的角色。接着深入探讨了SAE-J1939-73标准的理论基础,包括数据链路层扩展、数据结构、传输机制及诊断功能。文章分析了SAE-J1939-73在现代汽车诊断中的实际应用,车载网络诊断工具和设备,以
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )