STM32单片机进阶编程:DMA、CAN总线、USB通信的深入解析
发布时间: 2024-07-05 14:50:41 阅读量: 161 订阅数: 72 

stm32基础及进阶学习
# 1. STM32单片机基础**
STM32单片机是意法半导体(STMicroelectronics)生产的一系列32位微控制器,以其高性能、低功耗和广泛的外设而闻名。本节将介绍STM32单片机的基本架构、外设和编程环境,为后续章节的深入解析奠定基础。
STM32单片机采用ARM Cortex-M内核,具有强大的处理能力和低功耗特性。其外设丰富,包括定时器、ADC、DAC、UART、SPI、I2C、CAN总线等,可以满足各种应用需求。
STM32单片机通常使用C语言进行编程,并提供了一系列开发工具,如STM32CubeMX、IAR Embedded Workbench和Keil MDK,简化了开发过程。
# 2. DMA(直接内存访问)**
**2.1 DMA的工作原理和配置**
DMA(直接内存访问)是一种外设与内存之间进行数据传输的机制,它可以绕过CPU,直接在外部设备和内存之间传输数据,从而提高数据传输效率。
**DMA的工作原理:**
1. **DMA请求:**外设向DMA控制器发送DMA请求信号,表明需要进行数据传输。
2. **DMA配置:**DMA控制器根据配置的源地址、目的地址、传输长度等参数,设置DMA传输通道。
3. **数据传输:**DMA控制器控制数据总线,直接在源地址和目的地址之间传输数据,无需CPU干预。
4. **DMA中断:**数据传输完成后,DMA控制器会产生中断信号,通知CPU传输完成。
**DMA的配置:**
DMA控制器需要配置以下参数:
- **源地址:**数据源的起始地址。
- **目的地址:**数据目的地的起始地址。
- **传输长度:**需要传输的数据字节数。
- **传输模式:**单次传输、循环传输或乒乓传输。
- **数据宽度:**8位、16位或32位。
- **优先级:**DMA请求的优先级。
**代码块:**
```c
// DMA配置
DMA_InitTypeDef DMA_InitStructure;
// 配置源地址
DMA_InitStructure.DMA_MemoryBaseAddr = (uint32_t)sourceBuffer;
// 配置目的地址
DMA_InitStructure.DMA_PeripheralBaseAddr = (uint32_t)&USARTx->DR;
// 配置传输长度
DMA_InitStructure.DMA_BufferSize = BUFFERSIZE;
// 配置传输模式
DMA_InitStructure.DMA_Mode = DMA_Mode_Normal;
// 配置数据宽度
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte;
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_Byte;
// 配置优先级
DMA_InitStructure.DMA_Priority = DMA_Priority_High;
// 初始化DMA
DMA_Init(DMAx_Channelx, &DMA_InitStructure);
```
**逻辑分析:**
该代码块配置了DMA传输通道。它将源地址设置为sourceBuffer,目的地址设置为USARTx->DR(USART数据寄存器),传输长度为BUFFERSIZE,传输模式为单次传输,数据宽度为8位,优先级为高。
**2.2 DMA的应用场景和优势**
DMA广泛应用于需要高速数据传输的场景,例如:
- **传感器数据采集:**DMA可以快速将传感器数据从外设传输到内存,避免CPU因数据传输而阻塞。
- **图像处理:**DMA可以高效地将图像数据从内存传输到显示器或其他外设。
- **网络通信:**DMA可以加快网络数据包的传输速度,提高网络吞吐量。
**DMA的优势:**
- **提高数据传输效率:**DMA绕过CPU,直接在外部设备和内存之间传输数据,大大提高了数据传输效率。
- **减轻CPU负担:**DMA无需CPU干预,可以释放CPU资源,使其专注于其他任务。
- **降低功耗:**DMA传输数据时不需要CPU参与,可以降低功耗。
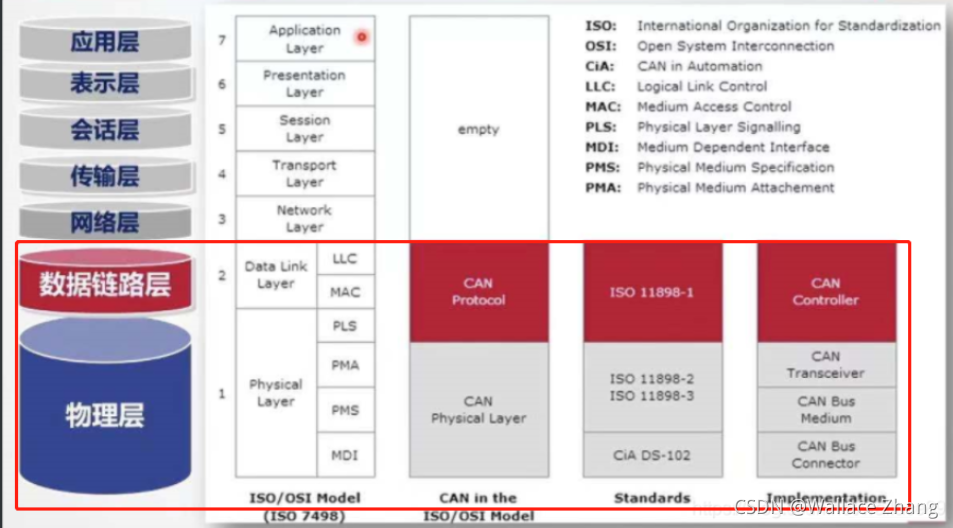
# 3.1 CAN总线的协议和特点
CAN(控制器局域网络)总线是一种广泛应用于工业自动化、汽车电子和医疗设备等领域的串行通信协议。它以其高可靠性、高实时性和抗干扰能力而著称。
**协议特点**
CAN总线采用多主总线结构,每个节点都可以发送和接收消息。消息通过称为“帧”的特定格式进行传输,帧中包含以下字段:
- 起始位:标识帧的开始。
- 仲裁场:决定哪个节点可以发送消息。
- 控制场:指定消息的类型和长度。
- 数据场:包含消息数据。
- CRC校验场:用于检测传输错误。
- 结束位:标识帧的结束。
**仲裁机制**
CAN总线采用非破坏性仲裁机制,当多个节点同时尝试发送消息时,具有最高优先级的节点将获得发送权。仲裁场中包含一个11位的标识符,标识符值越小,优先级越高。
**容错机制**
CAN总线具有强大的容错机制,包括:
- 奇偶校验:用于检测数据传输中的错误。
- CRC校验:用于检测帧中数据的完整性。
- 错误计数器:用于跟踪节点发送或接收错误消息的次数。
- 错误帧:当检测到错误时,节点将发送错误帧,通知其他节点停止传输。
### 3.2 CAN总线在STM32单片机上的实现
STM32单片机集成了CAN控制器外设,支持CAN总线通信。CAN控制器外设提供了以下功能:
- 多个CAN控制器:每个STM32单片机通常包含多个CAN控制器,允许同时连接多个CAN网络。
- 可配置的比特率:可以配置CAN控制器以支持不同的比特率,从10kbps到1Mbps。
- 灵活的消息缓冲区:CAN控制器具有多个消息缓冲区,允许存储和管理多个消息。
- 中断支持:CAN控制器支持中断,当有消息到达或发生错误时触发中断。
### 3.3 CAN总线的应用实例
CAN总线在工业自动化、汽车电子和医疗设备等领域有广泛的应用。一些常见的应用实例包括:
- 工业自动化:CAN总线用于连接传感器、执行器和控制器,实现设备之间的通信和控制。
- 汽车电子:CAN总线用于连接汽车中的各种电子模块,如发动机控制模块、变速箱控制模块和车身控制模块。
- 医疗设备:CAN总线用于连接医疗设备,如监护仪、输液泵和呼吸机。
# 4.1 USB通信的原理和协议
### USB通信概述
USB(通用串行总线)是一种广泛应用于计算机、外围设备和嵌入式系统之间的串行通信协议。它提供了一种标准化的接口,允许设备通过单根电缆进行数据传输和电源供电。
### USB通信协议
USB通信协议是一个分层结构,包括以下层:
- **物理层:**定义电气连接、信号传输和数据速率。
- **数据链路层:**负责数据帧的封装、传输和错误检测。
- **传输层:**提供可靠的数据传输,包括流量控制和错误恢复机制。
- **应用层:**定义特定设备的通信协议,例如HID(人机界面设备)和CDC(通信设备类)。
### USB通信模式
USB通信支持两种模式:
- **主机模式:**控制USB总线并与外围设备通信。
- **设备模式:**连接到主机并响应主机的请求。
STM32单片机通常配置为设备模式,与主机(例如PC或微控制器)通信。
### USB通信速度
USB通信支持多种数据速率,包括:
- **低速(LS):**1.5 Mbps
- **全速(FS):**12 Mbps
- **高速(HS):**480 Mbps
- **超高速(SS):**5 Gbps
STM32单片机通常支持全速或高速USB通信。
# 5.1 中断处理和优先级设置
中断是一种硬件机制,当发生特定事件时,它会暂停当前正在执行的程序,并跳转到一个称为中断服务程序(ISR)的特殊函数。中断处理在实时系统中至关重要,因为它允许系统快速响应外部事件,例如传感器输入或通信请求。
### 中断处理流程
STM32单片机支持多达 80 个中断源,每个中断源都有一个唯一的向量表地址。当发生中断时,处理器会自动跳转到与该中断源对应的向量表地址,然后执行中断服务程序。中断服务程序负责处理中断事件,并采取适当的措施,例如读取传感器数据或发送数据包。
### 中断优先级
STM32单片机支持中断优先级,这意味着不同的中断可以具有不同的优先级。当多个中断同时发生时,优先级较高的中断将被优先处理。中断优先级可以通过NVIC(嵌套向量中断控制器)寄存器进行配置。
### 中断配置
要配置中断,需要执行以下步骤:
1. **使能中断源:**通过设置 NVIC 中的相应位来使能中断源。
2. **设置中断优先级:**通过设置 NVIC 中的相应寄存器来设置中断优先级。
3. **编写中断服务程序:**编写一个 ISR 函数来处理中断事件。ISR 函数必须位于 .isr_vector 节中。
### 代码示例
以下代码示例展示了如何配置中断和编写 ISR 函数:
```c
// 使能中断源
NVIC_EnableIRQ(EXTI0_IRQn);
// 设置中断优先级
NVIC_SetPriority(EXTI0_IRQn, 2);
// 中断服务程序
void EXTI0_IRQHandler(void) {
// 清除中断标志位
EXTI->PR = EXTI_PR_PR0;
// 处理中断事件
// ...
}
```
### 优化中断处理
为了优化中断处理,可以采用以下策略:
* **使用中断分组:**将具有相似优先级的中断分组到一起,以减少中断处理时间。
* **使用中断嵌套:**允许高优先级中断打断低优先级中断,以确保及时响应关键事件。
* **优化 ISR 函数:**保持 ISR 函数简短高效,只执行必要的任务。
* **使用 DMA:**对于需要大量数据传输的中断,可以使用 DMA 来提高效率。
# 6. STM32单片机应用实例**
**6.1 基于DMA的传感器数据采集**
DMA(直接内存访问)是一种允许外设直接访问内存的机制,无需CPU干预。这大大提高了数据传输效率,特别是在处理大量数据时。
在STM32单片机中,DMA可以通过DMA控制器(DMAx)配置和控制。DMAx包含多个通道,每个通道可以连接到不同的外设。
**配置DMA数据采集**
1. 初始化DMA控制器和通道。
2. 配置DMA传输参数,包括源地址、目标地址、数据长度和传输方向。
3. 配置外设以触发DMA传输。
4. 启动DMA传输。
**代码示例:**
```c
#include "stm32f1xx_hal.h"
DMA_HandleTypeDef hdma_adc;
void HAL_ADC_ConvCpltCallback(ADC_HandleTypeDef *hadc) {
// DMA传输完成后的回调函数
// 从ADC外设读取数据并存储到内存中
}
void DMA_Config() {
// 初始化DMA控制器和通道
HAL_DMA_Init(&hdma_adc);
// 配置DMA传输参数
hdma_adc.Instance = DMAx_Channelx;
hdma_adc.Init.Direction = DMA_PERIPH_TO_MEMORY;
hdma_adc.Init.PeriphInc = DMA_PINC_DISABLE;
hdma_adc.Init.MemInc = DMA_MINC_ENABLE;
hdma_adc.Init.PeriphDataAlignment = DMA_PDATAALIGN_HALFWORD;
hdma_adc.Init.MemDataAlignment = DMA_MDATAALIGN_HALFWORD;
hdma_adc.Init.Mode = DMA_NORMAL;
hdma_adc.Init.Priority = DMA_PRIORITY_MEDIUM;
// 配置外设以触发DMA传输
HAL_ADC_Start_DMA(&hadc_adc, (uint32_t *)buffer, buffer_size);
// 启动DMA传输
HAL_DMA_Start(&hdma_adc);
}
```
**6.2 CAN总线网络中的节点通信**
CAN总线是一种用于工业自动化和汽车领域的串行通信总线。它以其高可靠性、低延迟和抗干扰性而著称。
在STM32单片机中,CAN总线可以通过CAN控制器(CANx)实现。CAN控制器负责处理CAN总线通信协议和数据传输。
**配置CAN总线节点**
1. 初始化CAN控制器。
2. 配置CAN总线波特率和通信参数。
3. 配置CAN总线过滤器以接收特定消息。
4. 注册CAN总线中断处理函数。
**代码示例:**
```c
#include "stm32f1xx_hal.h"
CAN_HandleTypeDef hcan;
void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan) {
// CAN总线接收中断回调函数
// 处理接收到的CAN总线消息
}
void CAN_Config() {
// 初始化CAN控制器
HAL_CAN_Init(&hcan);
// 配置CAN总线波特率和通信参数
hcan.Init.Mode = CAN_MODE_NORMAL;
hcan.Init.Prescaler = 1;
hcan.Init.SyncJumpWidth = CAN_SJW_1TQ;
hcan.Init.TimeSeg1 = CAN_BS1_1TQ;
hcan.Init.TimeSeg2 = CAN_BS2_1TQ;
hcan.Init.TimeTriggeredMode = DISABLE;
// 配置CAN总线过滤器
CAN_FilterTypeDef filter;
filter.FilterIdHigh = 0x0000;
filter.FilterIdLow = 0x0000;
filter.FilterMaskIdHigh = 0x0000;
filter.FilterMaskIdLow = 0x0000;
filter.FilterFIFOAssignment = CAN_RX_FIFO0;
filter.FilterActivation = ENABLE;
filter.FilterBank = 0;
filter.SlaveStartFilterBank = 0;
HAL_CAN_ConfigFilter(&hcan, &filter);
// 注册CAN总线中断处理函数
HAL_CAN_ActivateNotification(&hcan, CAN_IT_RX_FIFO0_MSG_PENDING);
// 启动CAN总线
HAL_CAN_Start(&hcan);
}
```
**6.3 USB通信的上位机控制**
USB(通用串行总线)是一种广泛用于计算机和外围设备之间通信的总线。它提供高速数据传输和电源供应。
在STM32单片机中,USB通信可以通过USB控制器(USBx)实现。USB控制器负责处理USB通信协议和数据传输。
**配置USB上位机控制**
1. 初始化USB控制器。
2. 配置USB通信参数。
3. 注册USB事件处理函数。
4. 创建USB端点以接收和发送数据。
**代码示例:**
```c
#include "stm32f1xx_hal.h"
USB_HandleTypeDef husb;
void HAL_USB_RxCpltCallback(USB_HandleTypeDef *husb) {
// USB接收中断回调函数
// 处理接收到的USB数据
}
void HAL_USB_TxCpltCallback(USB_HandleTypeDef *husb) {
// USB发送中断回调函数
// 处理发送的USB数据
}
void USB_Config() {
// 初始化USB控制器
HAL_USB_Init(&husb);
// 配置USB通信参数
husb.Init.DeviceClass = USB_DEVICE_CLASS_CDC;
husb.Init.DeviceSubclass = USB_DEVICE_SUBCLASS_CDC_ACM;
husb.Init.DeviceProtocol = USB_DEVICE_PROTOCOL_CDC_COM;
husb.Init.MaxPacketSize = 64;
husb.Init.Speed = USB_SPEED_FULL;
// 注册USB事件处理函数
HAL_USB_RegisterCallback(&husb, HAL_USB_EVENT_RX_CPLT_CB, HAL_USB_RxCpltCallback);
HAL_USB_RegisterCallback(&husb, HAL_USB_EVENT_TX_CPLT_CB, HAL_USB_TxCpltCallback);
// 创建USB端点
USB_EndpointTypeDef ep_rx;
USB_EndpointTypeDef ep_tx;
ep_rx.Endpoint = 1;
ep_rx.Type = USB_EP_TYPE_BULK;
ep_rx.MaxPacketSize = 64;
ep_rx.Interval = 0;
ep_tx.Endpoint = 1;
ep_tx.Type = USB_EP_TYPE_BULK;
ep_tx.MaxPacketSize = 64;
ep_tx.Interval = 0;
HAL_USB_Endpoint_Init(&husb, &ep_rx);
HAL_USB_Endpoint_Init(&husb, &ep_tx);
// 启动USB通信
HAL_USB_Start(&husb);
}
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《STM32单片机程序教程》专栏是STM32单片机开发人员的宝贵资源。它涵盖了从入门到高级的广泛主题,包括编程入门、DMA、CAN总线、USB通信、项目实战、调试技巧、优化编程、应用案例、开发环境配置、库函数详解、固件升级、安全编程、故障分析、性能优化、多任务编程、图形界面开发、传感器编程、电机控制、图像处理和人工智能应用。无论您是初学者还是经验丰富的开发人员,本专栏都提供了全面而深入的指导,帮助您掌握STM32单片机的各个方面,并将其应用于各种实际项目中。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
微机接口技术深度解析:串并行通信原理与实战应用
# 摘要
微机接口技术是计算机系统中不可或缺的部分,涵盖了从基础通信理论到实际应用的广泛内容。本文旨在提供微机接口技术的全面概述,并着重分析串行和并行通信的基本原理与应用,包括它们的工作机制、标准协议及接口技术。通过实例介绍微机接口编程的基础知识、项目实践以及在实际应用中的问题解决方法。本文还探讨了接口技术的新兴趋势、安全性和兼容
【进位链技术大剖析】:16位加法器进位处理的全面解析
# 摘要
进位链技术是数字电路设计中的基础,尤其在加法器设计中具有重要的作用。本文从进位链技术的基础知识和重要性入手,深入探讨了二进制加法的基本规则以及16位数据表示和加法的实现。文章详细分析了16位加法器的工作原理,包括全加器和半加器的结构,进位链的设计及其对性能的影响,并介绍了进位链优化技术。通过实践案例,本文展示了进位链技术在故障诊断与维护中的应用,并探讨了其在多位加法器设计以及多处理器系统中的高级应用。最后,文章展望了进位链技术的未来,
【均匀线阵方向图秘籍】:20个参数调整最佳实践指南
# 摘要
均匀线阵方向图是无线通信和雷达系统中的核心技术之一,其设计和优化对系统的性能至关重要。本文系统性地介绍了均匀线阵方向图的基础知识,理论基础,实践技巧以及优化工具与方法。通过理论与实际案例的结合,分析了线阵的基本概念、方向图特性、理论参数及其影响因素,并提出了方向图参数调整的多种实践技巧。同时,本文探讨了仿真软件和实验测量在方向图优化中的应用,并介绍了最新的优化算法工具。最后,展望了均匀线阵方向图技术的发展趋势,包括新型材料和技术的应用、智能化自适应方向图的研究,以及面临的技术挑战与潜在解决方案。
# 关键字
均匀线阵;方向图特性;参数调整;仿真软件;优化算法;技术挑战
参考资源链
ISA88.01批量控制:制药行业的实施案例与成功经验

# 摘要
ISA88.01标准为批量控制系统提供了框架和指导原则,尤其是在制药行业中,其应用能够显著提升生产效率和产品质量控制。本文详细解析了ISA88.01标准的概念及其在制药工艺中的重要
实现MVC标准化:肌电信号处理的5大关键步骤与必备工具

# 摘要
本文探讨了MVC标准化在肌电信号处理中的关键作用,涵盖了从基础理论到实践应用的多个方面。首先,文章介绍了
【FPGA性能暴涨秘籍】:数据传输优化的实用技巧
# 摘要
本文全面介绍了FPGA在数据传输领域的应用和优化技巧。首先,对FPGA和数据传输的基本概念进行了介绍,然后深入探讨了FPGA内部数据流的理论基础,包
PCI Express 5.0性能深度揭秘:关键指标解读与实战数据分析

# 摘要
PCI Express(PCIe)技术作为计算机总线标准,不断演进以满足高速数据传输的需求。本文首先概述PCIe技术,随后深入探讨PCI Express 5.0的关键技术指标,如信号传输速度、编码机制、带宽和吞吐量的理论极限以及兼容性问题。通过实战数据分析,评估PCI Express
CMW100 WLAN指令手册深度解析:基础使用指南揭秘
# 摘要
CMW100 WLAN指令是业界广泛使用的无线网络测试和分析工具,为研究者和工程师提供了强大的网络诊断和性能评估能力。本文旨在详细介绍CMW100 WLAN指令的基础理论、操作指南以及在不同领域的应用实例。首先,文章从工作原理和系统架构两个层面探讨了CMW100 WLAN指令的基本理论,并解释了相关网络协议。随后,提供了详细的操作指南,包括配置、调试、优化及故障排除方法。接着,本文探讨了CMW100 WLAN指令在网络安全、网络优化和物联网等领域的实际应用。最后,对CMW100 WLAN指令的进阶应用和未来技术趋势进行了展望,探讨了自动化测试和大数据分析中的潜在应用。本文为读者提供了
三菱FX3U PLC与HMI交互:打造直觉操作界面的秘籍
# 摘要
本论文详细介绍了三菱FX3U PLC与HMI的基本概念、工作原理及高级功能,并深入探讨了HMI操作界面的设计原则和高级交互功能。通过对三菱FX3U PLC的编程基础与高级功能的分析,本文提供了一系列软件集成、硬件配置和系统测试的实践案例,以及相应的故障排除方法。此外,本文还分享了在不同行业应用中的案例研究,并对可能出现的常见问题提出了具体的解决策略。最后,展望了新兴技术对PLC和HMI
【透明度问题不再难】:揭秘Canvas转Base64时透明度保持的关键技术

# 摘要
本文旨在全面介绍Canvas转Base64编码技术,从基础概念到实际应用,再到优化策略和未来趋势。首先,我们探讨了Canvas的基本概念、应用场景及其重要性,紧接着解析了Base64编码原理,并重点讨论了透明度在Canvas转Base64过程中的关键作用。实践方法章节通过标准流程和技术细节的讲解,提供了透明度保持的有效编码技巧和案例分析。高级技术部分则着重于性能优化、浏览器兼容性问题以及Ca
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )