神经网络控制在工业自动化中的应用:案例研究
发布时间: 2024-07-02 18:15:09 阅读量: 122 订阅数: 47 

神经网络PID控制器在跳汰机自动排料系统中应用

# 1. 神经网络基础**
神经网络是一种受生物神经系统启发的机器学习模型,它由相互连接的节点(神经元)组成。每个神经元接收输入信号,并根据其权重和偏置计算输出信号。神经网络通过训练过程调整这些权重和偏置,以学习复杂模式和做出预测。
神经网络通常由输入层、隐藏层和输出层组成。输入层接收原始数据,隐藏层处理数据并提取特征,输出层产生最终预测。通过使用反向传播算法,神经网络可以学习从输入数据到期望输出之间的映射关系。
# 2. 神经网络控制原理**
神经网络控制是一种利用神经网络模型进行控制系统设计的技术。与传统控制方法不同,神经网络控制不需要对系统进行精确的数学建模,而是通过学习输入输出数据之间的关系来实现控制目标。
**2.1 神经网络控制模型**
神经网络控制模型通常采用前馈神经网络或递归神经网络。前馈神经网络是一种单向的网络结构,其中输入层通过隐含层传递到输出层,而递归神经网络则允许信息在网络中循环流动,从而可以处理时序数据。
**2.2 控制算法设计**
神经网络控制算法的设计主要分为两类:反向传播算法和强化学习算法。
**2.2.1 反向传播算法**
反向传播算法是一种监督学习算法,通过最小化输出误差来调整神经网络的权重。具体步骤如下:
- **正向传播:**将输入数据传递到网络中,计算输出值。
- **误差计算:**计算输出值与目标值之间的误差。
- **反向传播:**将误差反向传播到网络中,计算每个权重的梯度。
- **权重更新:**根据梯度更新权重,减小误差。
```python
import numpy as np
def backpropagation(X, y, model, learning_rate):
# 正向传播
y_pred = model.predict(X)
# 误差计算
error = y_pred - y
# 反向传播
gradients = model.calculate_gradients(X, error)
# 权重更新
model.update_weights(gradients, learning_rate)
```
**2.2.2 强化学习算法**
强化学习算法是一种无监督学习算法,通过与环境交互并获得奖励来学习控制策略。具体步骤如下:
- **初始化:**随机初始化神经网络的权重。
- **探索:**在环境中采取动作,并观察奖励。
- **利用:**利用当前的权重,选择最优的动作。
- **更新:**根据奖励,更新神经网络的权重。
```python
import gym
env = gym.make('CartPole-v0')
def reinforcement_learning(env, model, episodes):
for episode in range(episodes):
# 初始化状态
state = env.reset()
# 探索和利用
while True:
action = model.choose_action(state)
next_state, reward, done, _ = env.step(action)
# 更新权重
model.update_weights(state, action, reward, next_state, done)
state = next_state
if done:
break
```
# 3. 神经网络控制实践**
### 3.1 工业过程建模
**3.1.1 系统识别方法**
工业过程建模是神经网络控制的关键步骤,其目的是建立一个准确反映真实过程动态的数学模型。常用的系统识别方法包括:
- **时域方法:**基于输入-输出数据的时域响应来建立模型,如自回归移动平均(ARMA)模型和状态空间模型。
- **频域方法:**基于输入-输出数据的频域响应来建立模型,如频率响应函数(FRF)和传递函数模型。
- **非参数方法:**直接从输入-输出数据中提取模型,无需假设模型结构,如神经网络模型和支持向量机(SVM)模型。
**3.1.2 神经网络模型选择**
神经网络模型的选择取决于工业过程的复杂性和可获得的数据。常用的神经网络模型包括:
- **前馈神经网络(FFNN):**具有输入层、隐藏层和输出层,层与层之间通过权重和偏置连接,适用于非线性系统建模。
- **递归神经网络(RNN):**具有反馈连接,可以处理序列数据和时间依赖性,适用于预测和时序建模。
- **卷积神经网络(CNN):**具有卷积层,可以提取图像和信号中的空间特征,适用于图像识别和信号处理。
### 3.2 神经网络控制器设计
**3.2.1 控制目标设定**
神经网络控制器的设计首先要明确控制目标,如稳定性、跟踪性能、鲁棒性等。根据控制目标,可以确定控制算法和神经网络结构。
**3.2.2 控制器结构与参数优化**
神经网络控制器通常采用反馈控制结构,其中神经网络模型作为控制器,根据系统状态和参考信号计算控制输出。控制器结构和参数的优化是关键步骤,可以通过以下方法实现:
- **反向传播算法:**基于梯度下降,通过最小化误差函数来更新神经网络权重和偏置,适用于FFNN和RNN模型。
- **强化学习算法:**基于试错和奖励机制,通过与环境交互来学习最佳控制策略,适用于复杂和不确定的系统。
**代码块:**
```python
import tensorflow as tf
# 定义神经网络控制器
class NeuralNetworkController:
def __init__(self, input_dim, output_dim):
self.model = tf.keras.Sequential([
tf.keras.layers.Dense(128, activation='relu'),
tf.keras.layers.Dense(output_dim, activation='linear')
])
def predict(self, state):
return self.model.predict(state)
# 定义控制算法
de
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
“神经网络控制”专栏深入探讨了神经网络在控制系统中的应用。从基础知识到高级算法,该专栏涵盖了神经网络控制的各个方面,包括自适应性、鲁棒性、稳定性、实时实现和实际应用。通过案例分析、最佳策略和深入解析,该专栏提供了从小白到高手的进阶攻略。它还探索了神经网络控制在工业自动化、机器人技术、无人驾驶汽车、医疗保健、金融科技、能源管理、交通管理、环境监测、网络安全、国防、太空探索和制造业等领域的应用。该专栏旨在帮助读者了解神经网络控制的潜力,并将其应用于各种领域,从而实现更好的控制、更智能的决策和更高的效率。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【软件管理系统设计全攻略】:从入门到架构的终极指南
# 摘要
随着信息技术的飞速发展,软件管理系统成为支持企业运营和业务创新的关键工具。本文从概念解析开始,系统性地阐述了软件管理系统的需求分析、设计、数据设计、开发与测试、部署与维护,以及未来的发展趋势。重点介绍了系统需求分析的方法论、系统设计的原则与架构选择、数据设计的基础与高级技术、以及质量保证与性能优化。文章最后
【硬盘修复的艺术】:西数硬盘检测修复工具的权威指南(全面解析WD-L_WD-ROYL板支持特性)
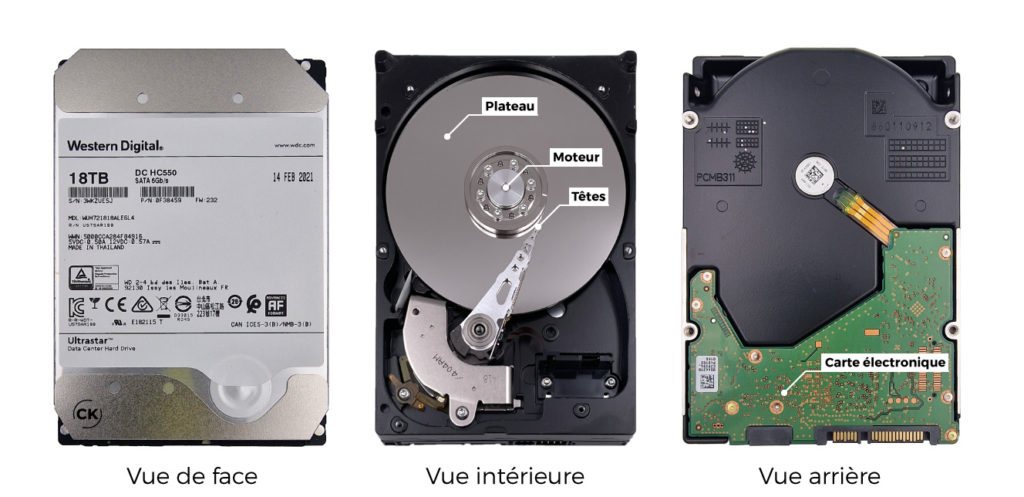
# 摘要
本文深入探讨了硬盘修复的基础知识,并专注于西部数据(西数)硬盘的检测修复工具。首先介绍了西数硬盘的内部结构与工作原理,随后阐述了硬盘故障的类型及其原因,包括硬件与软件方面的故障。接着,本文详细说明了西数硬盘检测修复工具的检测和修复理论基础,以及如何实践安装、配置和
【sCMOS相机驱动电路信号完整性秘籍】:数据准确性与稳定性并重的分析技巧

# 摘要
本文针对sCMOS相机驱动电路信号完整性进行了系统的研究。首先介绍了信号完整性理论基础和关键参数,紧接着探讨了信号传输理论,包括传输线理论基础和高频信号传输问题,以及信号反射、串扰和衰减的理论分析。本文还着重分析了电路板布局对信号完整性的影响,提出布局优化策略以及高速数字电路的布局技巧。在实践应用部分,本文提供了信号完整性测试工具的选择,仿真软件的应用,
能源转换效率提升指南:DEH调节系统优化关键步骤
# 摘要
能源转换效率对于现代电力系统至关重要,而数字电液(DEH)调节系统作为提高能源转换效率的关键技术,得到了广泛关注和研究。本文首先概述了DEH系统的重要性及其基本构成,然后深入探讨了其理论基础,包括能量转换原理和主要组件功能。在实践方法章节,本文着重分析了DEH系统的性能评估、参数优化调整,以及维护与故障排除策略。此外,本文还介绍了DEH调节系统的高级优化技术,如先进控制策略应用、系统集成与自适应技术,并讨论了节能减排的实现方法。最后,本文展望了DEH系统优化的未来趋势,包括技术创新、与可再生能源的融合以及行业标准化与规范化发展。通过对DEH系统的全面分析和优化技术的研究,本文旨在为提
【AT32F435_AT32F437时钟系统管理】:精确控制与省电模式

# 摘要
本文系统性地探讨了AT32F435/AT32F437微控制器中的时钟系统,包括其基本架构、配置选项、启动与同步机制,以及省电模式与能效管理。通过对时钟系统的深入分析,本文强调了在不同应用场景中实现精确时钟控制与测量的重要性,并探讨了高级时钟管理功能。同时,针对时钟系统的故障预防、安全机制和与外围设备的协同工作进行了讨论。最后,文章展望了时
【MATLAB自动化脚本提升】:如何利用数组方向性优化任务效率
# 摘要
本文深入探讨MATLAB自动化脚本的构建与优化技术,阐述了MATLAB数组操作的基本概念、方向性应用以及提高脚本效率的实践案例。文章首先介绍了MATLAB自动化脚本的基础知识及其优势,然后详细讨论了数组操作的核心概念,包括数组的创建、维度理解、索引和方向性,以及方向性在数据处理中的重要性。在实际应用部分,文章通过案例分析展示了数组方向性如何提升脚本效率,并分享了自动化
现代加密算法安全挑战应对指南:侧信道攻击防御策略
# 摘要
侧信道攻击利用信息泄露的非预期通道获取敏感数据,对信息安全构成了重大威胁。本文全面介绍了侧信道攻击的理论基础、分类、原理以及实际案例,同时探讨了防御措施、检测技术以及安全策略的部署。文章进一步分析了侧信道攻击的检测与响应,并通过案例研究深入分析了硬件和软件攻击手段。最后,本文展望了未来防御技术的发展趋势,包括新兴技术的应用、政策法规的作用以及行业最佳实践和持续教育的重要性。
# 关键字
侧信道攻击;信息安全;防御措施;安全策略;检测技术;防御发展趋势
参考资源链接:[密码编码学与网络安全基础:对称密码、分组与流密码解析](https://wenku.csdn.net/doc/64
【科大讯飞语音识别技术完全指南】:5大策略提升准确性与性能
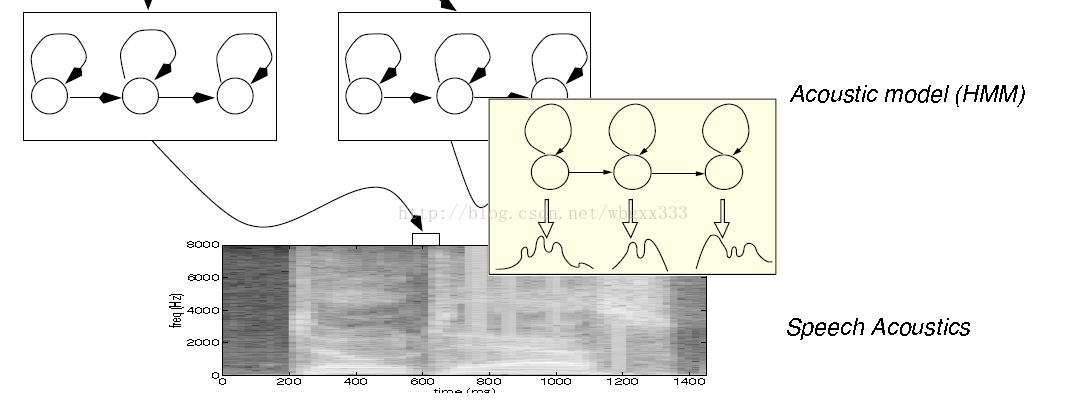
# 摘要
本论文综述了语音识别技术的基础知识和面临的挑战,并着重分析了科大讯飞在该领域的技术实践。首先介绍了语音识别技术的原理,包括语音信号处理基础、自然语言处理和机器学习的应用。随
【现场演练】:西门子SINUMERIK测量循环在多样化加工场景中的实战技巧
# 摘要
本文旨在全面介绍西门子SINUMERIK测量循环的理论基础、实际应用以及优化策略。首先概述测量循环在现代加工中心的重要作用,继而深入探讨其理论原理,包括工件测量的重要性、测量循环参数设定及其对工件尺寸的影响。文章还详细分析了测量循环在多样化加工场景中的应用,特别是在金属加工和复杂形状零件制造中的挑战,并提出相应的定制方案和数据处理方法。针对多轴机床的测量循环适配,探讨了测量策略和同步性问题。此外,本文还探讨了测量循环的优化方法、提升精确度的技巧,以及西门子SINUMERIK如何融合新兴测量技术。最后,本文通过综合案例分析与现场演练,强调了理论与实践的结合,并对未来智能化测量技术的发展
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )