ESP32多线程编程高效术:提升任务处理的终极技巧
发布时间: 2024-12-14 06:25:22 阅读量: 3 订阅数: 3 

ESP32 Python MQTT多线程应用

参考资源链接:[ESP32技术参考手册:应用开发工程师全面指南](https://wenku.csdn.net/doc/6412b776be7fbd1778d4a63a?spm=1055.2635.3001.10343)
# 1. ESP32多线程编程概述
在现代嵌入式系统开发中,ESP32作为一个功能强大的微控制器,其多线程编程能力是开发高性能应用程序的关键。ESP32不仅集成了Wi-Fi和蓝牙功能,还提供了双核处理器和丰富的外设接口,使得开发者可以在处理复杂任务时,通过创建多个线程来提高程序效率和响应速度。
在本章中,我们将介绍ESP32多线程编程的必要性和优势。同时,会概述ESP-IDF(Espressif IoT Development Framework)中提供的多线程API和编程模式。为了更好地掌握ESP32的多线程编程,建议读者具备基础的C语言编程知识和对ESP-IDF框架有基本了解。我们将从下一章开始,逐步深入探讨ESP32多线程编程的理论基础和实践技巧,最终达到能够设计和优化多线程应用程序的目标。
# 2. 多线程编程基础理论
### 2.1 多线程编程概念解析
#### 2.1.1 线程与进程的区别
在操作系统中,进程和线程是两个核心概念,它们在多线程编程中有着根本的不同。进程是程序的一次执行过程,拥有独立的内存空间和系统资源,可以视为独立的运行环境。线程则是进程中的一个执行单元,是CPU调度和分派的基本单位,共享进程内的资源,如内存和文件句柄。
一个进程可以包含一个或多个线程,而线程之间的切换比进程间的切换开销要小得多,因此,在多线程编程中,可以利用多线程来实现并行处理,提高程序的执行效率和响应速度。然而,由于线程共享进程的资源,这也带来了线程安全和同步的问题,需要程序员格外注意。
#### 2.1.2 多线程的优势与挑战
多线程的优势在于它能提高CPU利用率,使得在等待I/O操作完成时,CPU能够运行其他线程处理其他任务。此外,多线程也有助于改善应用程序的响应性和可伸缩性,这对于开发复杂的、需要处理大量并发操作的应用程序来说至关重要。
然而,多线程编程也面临着挑战,最主要的是线程安全问题。当多个线程同时访问和修改共享资源时,如果没有适当的同步机制,很容易产生数据不一致和竞态条件。此外,线程的创建和管理也需要额外的开销,因此过多的线程数量反而可能导致效率降低。
### 2.2 多线程模型详解
#### 2.2.1 用户线程与内核线程
多线程模型有用户级线程(User-Level Threads, ULTs)和内核级线程(Kernel-Level Threads, KLTs)之分。用户线程由用户空间的线程库管理,不需要操作系统内核的支持,因此它的创建和切换速度较快,但也有无法利用多核处理器并行执行的局限。内核线程由操作系统内核直接支持和管理,可以运行在多核处理器上,并且具有更好的并发性,但其创建和管理的开销相对较大。
#### 2.2.2 线程同步机制
线程同步机制用于协调多个线程对共享资源的访问,避免冲突。常见的同步机制有互斥锁(Mutexes)、信号量(Semaphores)、条件变量(Condition Variables)和读写锁(Read-Write Locks)等。互斥锁保证同一时刻只有一个线程可以访问资源;信号量通常用来控制对共享资源的访问数量;条件变量则用于线程间的协作,当条件不满足时线程可以挂起;读写锁允许多个读操作并行执行,但写操作时会独占资源。
#### 2.2.3 线程调度策略
线程调度是指操作系统如何决定哪个线程得到CPU的执行时间。常见的调度策略有轮转调度(Round-Robin)、优先级调度(Priority Scheduling)和多级反馈队列(Multilevel Feedback Queue)等。轮转调度为每个线程分配一个时间片,时间片用完后,线程进入等待队列的尾部。优先级调度则根据线程的优先级来决定调度顺序,通常高优先级的线程会先于低优先级的线程执行。多级反馈队列结合了轮转调度和优先级调度的优点,能够对不同类型的线程进行优化调度。
通过本节的讲解,我们可以了解到多线程编程的基本概念、模型以及可能面临的问题和挑战。下一章我们将深入ESP32多线程编程实践,了解如何在ESP32这个平台上进行多线程编程。
# 3. ESP32多线程编程实践
ESP32作为一个功能强大的微控制器,其支持多线程能力,意味着开发者可以利用其多核心架构来同时处理多个任务,从而提高应用的效率和响应能力。本章将深入探讨ESP32多线程编程实践,从线程的创建和管理到线程间通信,再到多线程的高级应用和性能优化。
## 3.1 ESP32线程创建与管理
### 3.1.1 初始化线程和参数传递
在ESP32中创建线程需要使用FreeRTOS的API。一个线程的创建涉及到提供线程的入口函数和初始参数。入口函数是指该线程执行时调用的函数,而初始参数则是传给该函数的参数。
下面是一段示例代码,演示了如何在ESP32中创建一个简单的线程:
```c
#include <stdio.h>
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
// 线程入口函数
void thread_function(void *arg) {
int received_value = (int)arg;
printf("This is thread %d\n", received_value);
}
void app_main() {
// 创建一个线程
xTaskCreate(&thread_function, /* Function to implement the task */
"Thread 1", /* Name of the task */
1024 * 2, /* Stack size in words */
(void *)1, /* Task input parameter */
10, /* Priority of the task */
NULL); /* Task handle */
}
```
在这个例子中,`thread_function`是线程的入口函数。`app_main`函数中的`xTaskCreate()`API用于创建一个新的任务。其参数依次为:任务函数、任务名称、任务堆栈大小、传递给任务函数的参数、任务的优先级和任务句柄。
代码逻辑逐行解读:
- `#include "freertos/task.h"`引入了FreeRTOS任务相关的头文件。
- `void thread_function(void *arg)`定义了一个线程入口函数,它接受一个泛型参数`arg`,这允许我们传递任何数据给线程。
- `app_main()`函数是ESP32应用的入口点,在这里调用`xTaskCreate()`。
- `xTaskCreate()`创建了一个新任务,指定了线程的入口函数、名称、堆栈大小、传入的参数、优先级和任务句柄(这里设置为`NULL`表示不需要返回任务句柄)。
这个简单的例子展示了如何在ESP32上初始化一个线程,并通过参数传递机制向线程传递初始化数据。
### 3.1.2 线程的优先级与调度
在多线程编程中,线程优先级和调度是两个核心概念。线程优先级指定了线程相对于其他线程的优先程度,而线程调度是指操作系统如何在多个线程之间分配CPU时间片。
ESP32支持配置不同的线程优先级,并允许开发者根据应用的需求为不同线程设置优先级。这在一些对实时性要求较高的应用中非常重要,因为高优先级的任务可以抢占低优先级任务的执行时间。
下面的代码展示了如何设置和获取线程优先级:
```c
// 设置任务优先级
vTaskPrioritySet(xTaskHandle hTaskToQuery, UBaseType_t uxBPriority);
// 获取任务优先级
UBaseType_t uxTaskPriorityGet(xTaskHandle hTaskToQuery);
```
这两个函数分别用于设置和获取任务的优先级,其中`hTaskToQuery`是需要查询或设置的任务句柄,`uxBPriority`是新的优先级值。
在多线程环境下,FreeRTOS使用了时间片轮转调度算法(Round-Robin Scheduling)以及可配置的优先级。每个任务都有一个固定时间的时间片去运行。如果一个任务在时间片用完前没有完成,它将会被放回就绪队列的末尾,等待下一次调度。
线程调度策略需要开发者根据实际应用场景进行选择,通常涉及到实时性能的平衡和资源的合理分配。
## 3.2 ESP32线程间通信
### 3.2.1 信号量的使用与实例

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
必看!WASP软件:风资源分析新手的终极指南

参考资源链接:[WASP风资源分析软件实战教程:风机选址与发电量预测](https://wenku.csdn.net/doc/1kbz
S32K144串行通信大全:UART、SPI和I2C协议深入解读
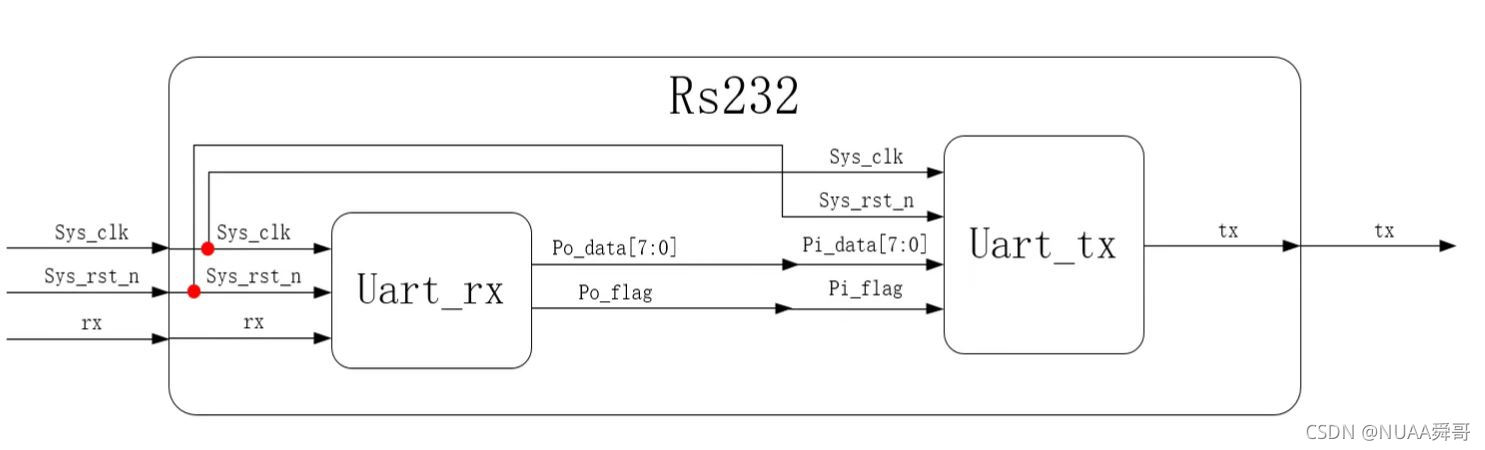
参考资源链接:[S32K144 reference manual](https://wenku.csdn.net/doc/6
eMMC 5.1性能优化:10分钟内掌握JEDEC文档的实战指南
参考资源链接:[官方EMMC5.1规范文档:JESD84-B51详解](https://wenku.csdn.net/doc/7dt0yhbxg8?spm=1055.2635.3001.10343)
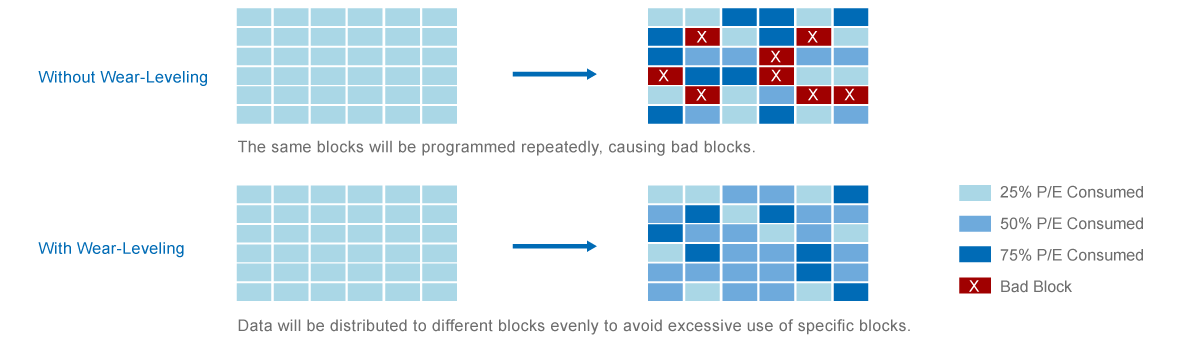
# 1. eMMC 5.1简介与性能潜力
## 1.1 eMMC 5.1简介
eMMC(嵌入式多媒体卡)是一种广泛应用于移动设备中的存储技术,它集成了N
刘次华笔记:如何将随机过程理论完美应用于实践

参考资源链接:[随机过程:刘次华版教材详解与应用](https://wenku.csdn.net/doc/7bhr4euvps?spm=1055.2635.3001.10343)
# 1. 随机过程理论概述
随机过程是研究随机现象随时间发展变化的一门数学分支,
AI-518温度控制算法深度解析:揭秘智能调节背后的技术
参考资源链接:[宇电AI-518/518P人工智能温度控制器V8.0使用详解与功能介绍](https://wenku.csdn.net/doc/64632e3b543f8444889b5d38?spm=1055.2635.3001.10343)
# 1. AI-518温度控制算法概述
## 1.1 温度控制的重要性
温度控制是维持设备运行稳定性和延长使用寿命的关键。在工业制造、生物医疗和智能家居等众多领域,精确的温度控制能确保产品质量和过程安全。
## 1.2 AI-518算法的简介
AI-518温度控制算法是一种先进的人工智能算法,结合了传统PID控制技术与机器学习优化功能。该算法致力于
【高效电源设计秘籍】:揭秘STM32F334同步整流技术

参考资源链接:[STM32F334驱动的同步整流BUCK-BOOST数字电源设计详解](https://wenku.csdn.net/doc/6412b4a3be7fbd1778d40495?spm=1055.2635.3001.10343)
# 1. STM32F334同步整流技术概述
同步整流技术在现代电子设计中变得越来越重要。通过使用STM32F334微控制器,我们可
【IBM i2 Analyst's Notebook 高级分析】:专家揭秘顶级技巧与最佳实践

参考资源链接:[IBM i2 Analyst's Notebook 中文入门:强大可视化分析工具](https://wenku.csdn.net/doc/6412b5b2be7fbd1778d4411d?spm=1055.2635.3001.10343)
# 1. IBM i2 Analyst's Notebook 简介
IBM i2 Analy
F5 One Connect应用剖析:深入理解其在多层应用中的角色与效能

参考资源链接:[F5负载均衡的One Connect原理与工作机制详解](https://wenku.csdn.net/doc/6412b495be7fbd1778d40189?spm=1055.2635.3001.10343)
# 1. F5 One Connect技术概览
在数字化时代,企业网络的效率和性能成为关键的竞争优势。F5 Networks公司的O
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )