ESP32与其他MCU通信协议:串口、I2C、SPI应用详解
发布时间: 2024-12-14 06:51:05 阅读量: 2 订阅数: 3 

ESP32_I2C_Slave:ESP32的I2C从属库
参考资源链接:[ESP32技术参考手册:应用开发工程师全面指南](https://wenku.csdn.net/doc/6412b776be7fbd1778d4a63a?spm=1055.2635.3001.10343)
# 1. ESP32与其他MCU通信协议概述
## 1.1 通信协议在嵌入式系统中的作用
在物联网(IoT)和嵌入式系统领域,多个微控制器单元(MCU)之间的通信是实现功能的核心。ESP32作为一款功能强大的MCU,支持多种通信协议,使得开发者能够轻松地与其他设备进行数据交换。了解ESP32支持的通信协议可以帮助开发者做出更有效的设计选择,实现更复杂的通信场景。
## 1.2 ESP32支持的主要通信协议
ESP32作为一款高性能的MCU,它内嵌了多种通信接口,可以支持诸如串口(USART)、I2C、SPI等协议。这些协议各自有不同的特点,如串口简单易用,I2C节省引脚,SPI速度较快。开发者可以根据应用场合的不同需求,选择最合适的通信协议。
## 1.3 选择通信协议的考量因素
在选择通信协议时,需要考虑多个因素,包括但不限于传输距离、数据速率、系统资源消耗、可用的物理引脚数量等。例如,若项目对功耗有严格要求,可能会优先考虑I2C通信协议;而如果对数据传输速率有较高要求,则可能会选择SPI协议。在实践中,往往会根据项目需求进行权衡选择。
在下一章节中,我们将详细探讨ESP32中串口通信协议的应用,包括串口的工作原理,以及如何在ESP32中配置和使用串口。
# 2. 串口通信协议在ESP32中的应用
## 2.1 串口通信基础
### 2.1.1 串口通信的工作原理
串口通信,即串行通信,是一种在设备之间以按位顺序传输数据的方式,通常通过TX(发送)和RX(接收)两条线进行。在数据传输过程中,串口通信将数据的每一位依次发送出去,这种方式对于硬件要求较低,实现简单,因而广泛用于嵌入式系统中。
ESP32是具有双核处理器的高性能MCU,其内置了多个串行通信控制器,支持主从模式,能够与其他设备进行串口通信。ESP32的串口通信符合通用异步收发传输器(UART)的标准,但需要正确的配置工作参数(如波特率、数据位、停止位、校验位等),才能保证与外设进行可靠的通信。
### 2.1.2 ESP32中串口的配置与初始化
配置ESP32串口的基本步骤如下:
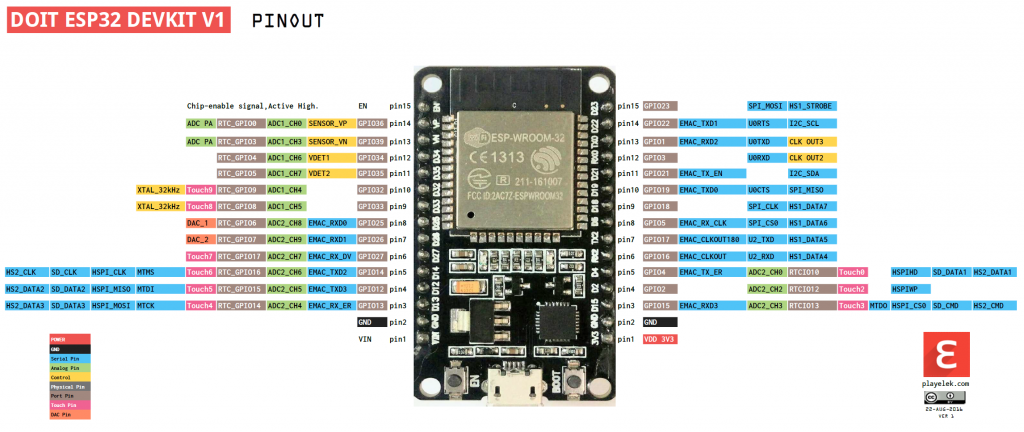
1. 选择合适的GPIO引脚作为TX和RX线。
2. 设置串口工作参数,包括波特率、数据位、停止位和校验位。
3. 初始化串口,启用中断或轮询模式,配置接收缓冲区。
4. 编写发送和接收函数,实现数据的传输。
以下代码演示了如何初始化ESP32的串口1,并设置基本通信参数:
```c
#include "driver/uart.h"
void app_main() {
uart_config_t uart_config = {
.baud_rate = 115200,
.data_bits = UART_DATA_8_BITS,
.parity = UART_PARITY_DISABLE,
.stop_bits = UART_STOP_BITS_1,
.flow_ctrl = UART_HW_FLOWCTRL_DISABLE
};
// Configure UART parameters
uart_param_config(UART_NUM_1, &uart_config);
// Set UART pins(TX: GPIO_NUM_1, RX: GPIO_NUM_3)
uart_set_pin(UART_NUM_1, GPIO_NUM_1, GPIO_NUM_3, UART_PIN_NO_CHANGE, UART_PIN_NO_CHANGE);
// Install UART driver, and get the queue handle
uart_driver_install(UART_NUM_1, 256, 256, 0, NULL, 0);
}
```
初始化过程中,我们首先定义了一个`uart_config_t`结构体,用于配置通信参数,包括波特率、数据位、校验位、停止位等。然后调用`uart_param_config`函数配置这些参数。通过`uart_set_pin`设置TX和RX的GPIO引脚。最后,`uart_driver_install`用于安装串口驱动,并创建一个队列以处理串口数据。
## 2.2 串口数据传输与处理
### 2.2.1 字符串的发送和接收
ESP32串口数据传输中最基本的操作就是字符串的发送和接收。发送字符串通常通过`uart_write_bytes`函数完成,而接收字符串则可选择中断模式或轮询模式。
以下是发送和接收字符串的示例代码:
```c
void send_string(uart_port_t uart_num, const char *str) {
uart_write_bytes(uart_num, str, strlen(str));
}
void receive_string(uart_port_t uart_num) {
const int uart_buffer_size = (1024);
uint8_t* data = (uint8_t*) malloc(uart_buffer_size);
while(1) {
int len = uart_read_bytes(uart_num, data, uart_buffer_size, 20 / portTICK_RATE_MS);
if(len > 0) {
for(int i = 0; i < len; i++) {
if(data[i] == '\n') {
data[i] = '\0';
printf("Received: %s\n", data);
memset(data, 0, len);
}
}
}
}
}
```
在发送字符串函数中,`uart_write_bytes`函数的第三个参数是字符串的长度,用于指定发送的字节数。接收字符串时,我们通过`uart_read_bytes`函数读取数据到缓冲区,然后在接收到换行符`\n`时,认为是一个完整的字符串,并进行处理。
### 2.2.2 数据缓冲和流控制
在高吞吐量或高延迟的通信场景中,数据缓冲和流控制是重要的考虑因素。ESP32提供了灵活的缓冲机制,可以设置接收缓冲区的大小,并通过硬件流控制(RTS/CTS)防止数据溢出。
以下是如何配置ESP32串口缓冲区以及启用硬件流控制的示例:
```c
void set_buffer_size(uart_port_t uart_num, uint16_t rx_buffer_size) {
// Allocate buffer
uint8_t* buffer = (uint8_t*) heap_caps_malloc(rx_buffer_size * sizeof(uint8_t), MALLOC_CAP_INTERNAL | MALLOC_CAP_8BIT);
uart_driver_install(uart_num, rx_buffer_size, 0, 0, NULL, 0);
uart_set_rx_buffer_size(uart_num, buffer, rx_buffer_size);
}
void set_flow_control(uart_port_t uart_num) {
// Set RTS/CTS flow control pins
uart_set_rts(uart_num, GPIO_NUM_4);
uart_set_cts(uart_num, GPIO_NUM_5);
uart_set_flow_ctrl(uart_num, UART_HW_FLOWCTRL_CTS_RTS);
}
```
在这段代码中,`set_buffer_size`函数用于分配接收缓冲区,并通过`uart_set_rx_buffer_size`函数设置缓冲区大小。`set_flow_control`函数展示了如何设置RTS和CTS引脚并启用硬件流控制。
## 2.3 串口通信中的常见问题及解决
### 2.3.1 波特率不匹配问题
波特率是串口通信中最关键的参数之一。如果通信双方的波特率不一致,会导致数据接收错误或完全无法通信。因此,在实际应用中,需要确保双方使用相同的波特率进行通信。
解决波特率不匹配问题的步骤通常包括:
1. 检查并确认双方的波特率设置。
2. 重新初始化串口,确保波特率设置正确。
3. 在发送端添加适当延时,避免发送速率过快。
### 2.3.2 串口冲突及避免策略
串口冲突通常发生在多个设备使用相同或相近的串口设置进行通信时。为了避免串口冲突,可以采取以下策略:
1. 为每个设备分配唯一的串口号和通信参数。
2. 使用不同的TX和RX引脚,或者通过软件区分不同的通信通道。
3. 确保软件中正确处理多个串口的并发操作和数据流控制。
## 2.4 串口通信的高级特性
ESP32提供的串口通信不仅限于基本的数据传输,还支持一些高级特性,如硬件流控制、调制解调控制信号(RTS/CTS)以及可配置的信号引脚。利用这些高级特性可以实现更复杂的通信协议和更稳定的通信环境。
## 2.5 实际应用案例
在实际的物联网应用中,串口通信经常用于与传感器、GPS模块等低速外设进行数据交换。ESP32强大的串口功能使得开发者可

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【LTspice IV:电路仿真从零到精通】:20年经验技术大佬带你解锁仿真秘密

参考资源链接:[LTspiceIV教程.pdf](https://wenku.csdn.net/doc/6401ad20cce7214c316ee642?spm=
故障无处遁形:三菱 MR-J2S-B故障排除手册的终极解决步骤

参考资源链接:[三菱伺服放大器MR-J2S-B中文说明书:参数与故障代码解析](https://wenku.csdn.net/doc/6401ab96cce7214c316e8c80?spm=1055.2635.3001.10343)
# 1. MR-J2S-B伺服驱动器简介
## 1.1 MR-J2S-B伺服驱动器概述
MR-J2S-B伺服驱动器是三菱电机推出的一款高性能伺服系统,广泛应用于工业
Teamcenter集成SolidWorks完整教程:从新手到专家的进阶之路
参考资源链接:[Teamcenter与Solidworks集成详尽教程:步步操作](https://wenku.csdn.net/doc/6412b77dbe7fbd1778d4a7c8?s
现代通信的电磁场理论:《Field and Wave Electromagnetics》的实用指南
参考资源链接:[電磁學-Field and Wave Electromagnetics solution manual 2th(David.K.Chen).pdf](https://wenku.csdn.net/doc/6401ad0ccce7214c316ee17f?spm=1055.2635.3001.10343)
PJLink协议应用指南:实现多品牌投影机无缝控制的终极秘诀

参考资源链接:[PJlink投影机控制协议详解](https://wenku.csdn.net/doc/6412b733be7fbd1778d49726?spm=1055.2635.3001.10343)
# 1. PJLink协议概述与基础
PJLink协议是投影仪和相关设备远程控制领域中广
语法错误不再有:北京科技大学MOOC提供的科技论文纠错全攻略

参考资源链接:[北京科技大学研究生科技论文写作MOOC参考答案大全](https://wenku.csdn.net/doc/2kwju12dzh?spm=1055.2635.3001.10343)
# 1. 科技论文纠错的必要性与重要性
在科技迅猛发展的今天,科技论文作为学术交流的重要媒介,其准确性和规范性显得尤为重要。科技论文纠错不仅仅是为
工程师必备:Evans偏微分方程解决方案的计算方法与应用
参考资源链接:[Evans-PDE-Solution-Chapter-5-Sobolev.pdf](https://wenku.csdn.net/doc/646199185928463033b1a874?spm=1055.2635.3001.10343)
# 1. Evans偏微分方程概述
在现代科学技术领域,偏微分方程(Partial Differential Equations,简称PDEs)
【故障排查】:PATRAN-NASTRAN常见问题与解决方案,让你轻松应对各种问题

参考资源链接:[PATRAN-NASTRAN使用手册:从几何建模到高级分析](https://wenku.csdn.net/doc/7spfhn8huq?spm=1055.2635.3001.10343)
# 1. PATRAN-NASTRAN软件概述
在工程仿真领域,PATRAN-NASTRAN软件扮演着至关重要的角色。本章旨在
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )