【STM32F103VCT6 CAN总线实现】:汽车级通信协议详解
发布时间: 2024-12-24 17:19:42 阅读量: 26 订阅数: 18 

STM32F103VCT6核心板硬件资料.rar_STM32F103VCT6核心板硬件资料_stm32f103vct6 pcb_

# 摘要
本文详细介绍了STM32F103VCT6微控制器在CAN总线通信中的应用,包括硬件接口、编程实践、网络设计、驱动开发、错误诊断与调试技术,以及安全机制的实现。首先,概述了CAN总线基础与汽车通信协议,然后深入分析了STM32F103VCT6的CAN模块架构、时钟与电源管理、初始化和配置方法。接着,论文探讨了CAN帧结构、通信模式、状态控制和高级特性编程,以及实际应用中网络设计、驱动开发和调试策略。此外,本文还着重分析了CAN总线安全标准、加密技术应用以及安全性能的测试与案例研究。最后,展望了STM32F103VCT6在智能汽车领域和嵌入式系统中CAN总线的发展趋势与新标准的应用。
# 关键字
STM32F103VCT6;CAN总线;通信协议;硬件接口;安全机制;汽车电子
参考资源链接:[STM32F103VCT6原理图详解:集成与接口模块详析](https://wenku.csdn.net/doc/6462ec265928463033bc816f?spm=1055.2635.3001.10343)
# 1. CAN总线基础与汽车通信协议概述
## 1.1 CAN总线的起源与发展
CAN(Controller Area Network)总线最初由德国Bosch公司在20世纪80年代提出,主要应用于汽车电子控制系统中。它是一种多主机的串行通信协议,以其高可靠性和灵活性在汽车行业得到了广泛的应用。随着技术的发展,CAN协议也在不断地进行改进,形成了如CAN FD(Flexible Data-rate)等更高效的新标准。
## 1.2 CAN总线的特点与优势
CAN总线的设计以实时性、可靠性、抗干扰性强而著称。它的非破坏性仲裁技术确保了网络中的数据包在冲突时不会被破坏,而位填充技术和循环冗余校验(CRC)进一步增强了数据传输的准确性。CAN协议还允许网络上的节点在不降低网络效率的情况下,动态地改变其优先级,这为汽车通信提供了极大的灵活性。
## 1.3 汽车通信协议的分类
汽车通信协议按照不同的标准可以被分类为多个类型,例如按照网络拓扑可以分为星型、总线型和环型等。按照通信速度可以分为低速、中速和高速总线。在这些分类中,CAN总线因其高性能而被广泛应用在动力总成控制、底盘控制、车身控制等多个汽车电子领域中。此外,LIN(Local Interconnect Network)和FlexRay等协议也在某些特定场合与CAN总线并存,满足不同的通信需求。
通过本章内容,我们对CAN总线有了初步的认识,接下来将深入了解STM32F103VCT6微控制器上的CAN模块实现,进一步展开对汽车通信协议编程的探索。
# 2. STM32F103VCT6硬件接口详解
### 2.1 STM32F103VCT6 CAN模块架构
#### 2.1.1 CAN模块硬件组成
STM32F103VCT6是STMicroelectronics公司生产的一款高性能的ARM Cortex-M3微控制器,广泛应用于汽车、工业自动化等领域。其中,CAN模块是该微控制器中极为重要的通信接口之一,主要用于实现车辆内部不同设备间的高速数据交换。
CAN模块的硬件组成主要包括:CAN协议控制器、CAN收发器(Transceiver)、和相关的硬件滤波器。
- **CAN协议控制器**:负责实现CAN协议的所有功能,例如帧的生成、发送、接收、错误检测和处理等。
- **CAN收发器**:负责物理层的信号转换,将控制器产生的数字信号转换为差分信号发送到总线上,并将总线上的差分信号转换回数字信号供控制器处理。
- **硬件滤波器**:过滤掉不需要处理的消息,减少CPU的负担。
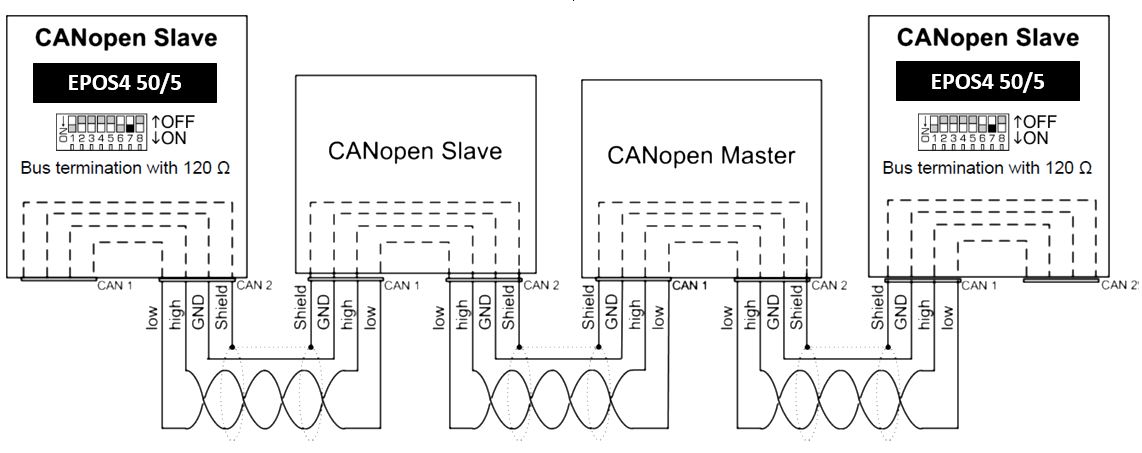
#### 2.1.2 CAN模块引脚功能与配置
STM32F103VCT6提供两个独立的CAN控制器,分别称为CAN1和CAN2。每个控制器都通过至少两个引脚与外部CAN收发器连接:一个是CAN发送引脚(通常标记为`CAN umieję`),另一个是CAN接收引脚(通常标记为`CAN_Rx`)。
通过这些引脚,STM32F103VCT6能够与CAN总线网络进行物理层连接。在进行物理连接之前,需要根据实际硬件需求对这些引脚进行正确的功能配置,包括设置为复用功能、配置为推挽或开漏输出等。
### 2.2 STM32F103VCT6时钟与电源管理
#### 2.2.1 CAN模块的时钟配置
STM32F103VCT6的CAN模块需要通过独立的时钟源来保证数据传输的同步性。通常,这个时钟源来自于微控制器内部的高速时钟(HSI)或者外部的高速时钟(HSE),经过内部的相位锁定环(PLL)调整后,输出给CAN模块使用。
在配置CAN模块的时钟时,需要确保时钟的频率符合CAN协议所要求的速率(比如500Kbps或者1Mbps等)。典型的配置代码如下:
```c
RCC->APB1ENR |= RCC_APB1ENR_CAN1EN; // Enable CAN1 clock
CAN1->MCR |= CAN_MCR_INRQ; // Enter initialization mode
CAN1->BTR = 0x001C000C; // Set baud rate to 500 kbps
CAN1->MCR &= ~CAN_MCR_INRQ; // Exit initialization mode
```
在上述代码中,通过修改`RCC->APB1ENR`寄存器,我们启用了CAN1的时钟。接着通过修改`CAN1->MCR`和`CAN1->BTR`寄存器,我们可以进入初始化模式,然后设置波特率。最后退出初始化模式,CAN模块就可以正常工作了。
#### 2.2.2 电源优化策略
电源管理是微控制器设计中的一个重要方面,特别是对于功耗要求较高的汽车电子应用。STM32F103VCT6提供了多种低功耗模式,包括待机模式、睡眠模式等。
在设计时,需要根据实际应用场景对电源进行优化。例如,如果CAN通信不需要一直保持激活状态,可以在不需要通信的时候将CAN模块置于低功耗模式。在代码中实现如下:
```c
CAN1->MCR |= CAN_MCR_SLAK; // Initiate sleep mode
```
这段代码将CAN1模块置于睡眠模式,从而降低功耗。
### 2.3 STM32F103VCT6 CAN初始化与配置
#### 2.3.1 CAN初始化流程
初始化CAN模块是一个非常关键的步骤,需要按照严格的顺序和正确的方法进行,以保证模块能够正常工作。
初始化流程通常包括:时钟使能、复位CAN模块、配置波特率、设置滤波器以及设置中断(如果需要)等步骤。
```c
RCC->APB1ENR |= RCC_APB1ENR_CAN1EN; // Enable CAN1 clock
CAN1->MCR |= CAN_MCR_INRQ; // Enter initialization mode
CAN1->BTR = 0x001C000C; // Set baud rate to 500 kbps
CAN1->MCR &= ~CAN_MCR_INRQ; // Exit initialization mode
```
以上示例代码展示了CAN模块的基本初始化步骤,具体参数的设置需要根据实际硬件和需求来配置。
#### 2.3.2 CAN滤波器和屏蔽器设置
在多主CAN网络中,消息滤波器和屏蔽器是实现消息过滤的关键。它们可以设置特定的ID来选择性接收消息,从而减少不必要的CPU负载。
在STM32F103VCT6中,可以通过编程`FMR`和`FM1R`寄存器来启用滤波器模式,并通过`Filter Register`和`Filter Mask Register`来设置具体的过滤规则。
```c
CAN1->FMR |= CAN_FMR_FINIT; // Enter filter initialization mode
CAN1->FA1R = 0x01; // Enable filter 0
CAN1->FS1R = 0x01; // Set filter scale to 32-bit
CAN1->FM1R = 0x00; // Set filter mode to identifier list mode
CAN1->sFilterRegister[0].FR1 = 0x123; // Filter ID
CAN1->sFilterMaskRegister[0].FR1 = 0xFFC; // Mask for ID
CAN1->FMR &= ~CAN_FMR_FINIT; // Exit filter initialization mode
```
在这段代码中,我们首先设置了滤波器的初始化模式,接着启用第一个滤波器,设置其为32位格式,并设置为识别器列表模式。然后,我们设置了过滤器ID和相应的掩码,最后退出了滤波器的初始化模式。
通过以上二级章节的介绍,我们深入了解了STM32F103VCT6 CAN模块的硬件架构、时钟和电源管理、以及初始化和配置方法。这些基础知识点为后续章节中深入探讨CAN通信协议编程、实践应用、安全机制以及未来发展趋势提供了坚实的基础。在下一章节,我们将继续探索STM32F103VCT6在CAN通信协议编程方面的应用和实践。
# 3. STM32F103VCT6 CAN通信协议编程
在本章中,我们将深入探讨STM32F103VCT6的CAN通信协议编程,揭示如何高效地实现数据的封装、传输和接收。通过本章节的介绍,读者将掌握CAN帧结构、通信模式和状态控制以及高级通信特性的实现方法,为实践应用和深入研究打下坚实的基础。
## 3.1 CAN帧结构与数据封装
### 3.1.1 标准帧和扩展帧格式
CAN协议支持两种帧格式:标准帧和扩展帧。标准帧的标识符为11位,而扩展帧为29位。每种帧格式都有其特定的使用场景和优势。在STM32F103VCT6中,通过配置CAN控制器寄存器,可以选择支持标准帧或扩展帧。
### 3.1.2 数据封装和解析方法
数据封装和解析是CAN通信的关键环节。STM32F103VCT6的CAN模块允许用户将数据封装到标准或扩展帧中,并在接收端进行准确的解析。
以下是封装和解析数据的代码示例:
```c
void CAN_SendData(uint8_t id, uint8_t* data, uint8_t length) {
CAN_TxMsg TxMessage;
TxMessage.StdId = id; // 设置标准ID
TxMessage.ExtId = 0x01; // 若使用扩展帧,则设置扩展ID
TxMessage.IDE = CAN_ID_STD; // 标准帧
TxMessage.RTR = CAN_RTR_DATA; // 数据帧
TxMessage.DLC = length; // 数据长度
for (uint8_t i = 0; i < length; i++) {
TxMessage.Data[i] = data[i]; // 填充数据
}
// 发送CAN消息
if (CAN_Transmit(CAN1, &TxMessage) == CAN_SUC
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
CANopen与Elmo协同工作:自动化系统集成的终极指南
# 摘要
本文综合介绍了CANopen协议和Elmo伺服驱动器的基础知识、集成和协同工作实践,以及高级应用案例研究。首先,概述了CANopen通信模型、消息对象字典、数据交换和同步机制,接着详细讲解了Elmo伺服驱动器的特点、配置优化和网络通信。文章深入探讨了CANopen与Elmo在系统集成、配置和故障诊断方面的协同工作,并通过案例研究,阐述了其在高级应用中的协同功能和性能调优。最后,展望了
【CAT021报文实战指南】:处理与生成,一步到位

# 摘要
CAT021报文作为特定领域内的重要通信协议,其结构和处理技术对于相关系统的信息交换至关重要。本文首先介绍了CAT021报文的基本概览和详细结构,包括报文头、数据字段和尾部的组成及其功能。接着,文章深入探讨了CAT021报文的生成技术,包括开发环境的搭建、编
【QoS终极指南】:7个步骤精通服务质量优化,提升网络性能!
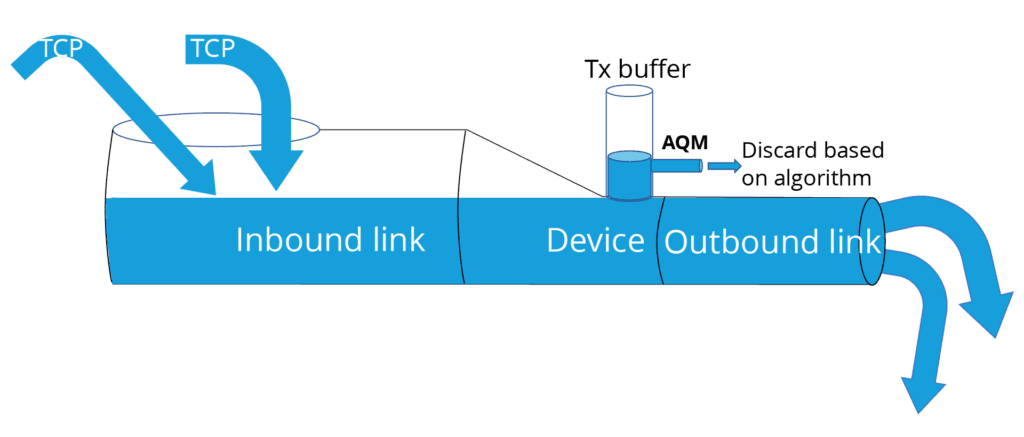
# 摘要
服务质量优化(QoS)是网络管理和性能保障的核心议题,对确保数据传输效率和用户体验至关重要。本文首先介绍了QoS的基础知识,包括其概念、重要性以及基本模型和原理。随后,文章详细探讨了流量分类、标记以及QoS策略的实施和验证方法。在实战技巧部分,本文提供了路由器和交换机上QoS配置的实战指导,包括VoIP和视频流量的优化技术。案例研究章节分析了QoS在不同环境下的部署和
【必备技能】:从零开始的E18-D80NK传感器与Arduino集成指南
# 摘要
本论文旨在介绍E18-D80NK传感器及其与Arduino硬件平台的集成应用。文章首先简要介绍E18-D80NK传感器的基本特性和工作原理,随后详细阐述Arduino硬件和编程环境,包括开发板种类、IDE安装使用、C/C++语言应用、数字和模拟输入输出操作。第三章深入探讨了传感器与Arduino硬件的集成,包括硬件接线、安全
ArcGIS空间数据分析秘籍:一步到位掌握经验半变异函数的精髓
# 摘要
空间数据分析是地理信息系统(GIS)研究的关键组成部分,而半变异函数作为分析空间自相关性的核心工具,在多个领域得到广泛应用。本文首先介绍了空间数据分析与半变异函数的基本概念,深入探讨了其基础理论和绘图方法。随后,本文详细解读了ArcGIS空间分析工具在半变异函数分析中的应用,并通过实际案例展示了其在环境科学和土地资源管理中的实用性。文章进一步探讨了半变异函数模型的构建、空间插值与预测,以及空间数据模拟的高
【Multisim14实践案例全解】:如何构建现实世界与虚拟面包板的桥梁
# 摘要
本文详细介绍了Multisim 14软件的功能与应用,包括其基本操作、高级应用以及与现实世界的对接。文章首先概述了Multisim 14的界面布局和虚拟元件的使用,然后探讨了高级电路仿真技术、集成电路设计要点及故障诊断方法。接着,文章深入分析了如何将Multisim与实际硬件集成,包括设计导出、PCB设计与制作流程,以及实验案例分析。最后,文章展望了软件的优化、扩展和未来发展方向,涵
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )