【STM32F103VCT6新手必读】:手把手教你从零开始构建嵌入式项目
发布时间: 2024-12-24 15:51:42 阅读量: 9 订阅数: 13 
# 摘要
本文详细介绍了STM32F103VCT6微控制器的应用开发流程,涵盖了从开发环境搭建到项目综合应用案例的全面分析。首先,文章概述了STM32F103VCT6的基本特性,接着深入指导如何配置Keil MDK-ARM开发环境和ST-Link驱动,以及如何使用STM32CubeMX工具进行项目初始化。在基础编程实践方面,本文讲解了寄存器操作、HAL库应用、以及中断与定时器的编程方法。随后,文章重点介绍了串口通信、ADC和DAC的应用、以及I2C与SPI通信协议的实践。最后,本文探讨了项目构建与调试技巧,包括调试准备、错误排查解决以及系统性能优化,并通过综合应用案例展示了如何开发简易示波器、基于触摸屏的用户界面和蓝牙数据通信。本论文旨在为开发者提供全面、系统的STM32F103VCT6开发指南,促进学习者掌握高效、可靠的嵌入式系统开发技能。
# 关键字
STM32F103VCT6;Keil MDK-ARM;ST-Link驱动;STM32CubeMX;HAL库;中断;定时器;串口通信;ADC/DAC;I2C/SPI;调试技巧;性能优化;蓝牙通信
参考资源链接:[STM32F103VCT6原理图详解:集成与接口模块详析](https://wenku.csdn.net/doc/6462ec265928463033bc816f?spm=1055.2635.3001.10343)
# 1. STM32F103VCT6概述
STM32F103VCT6是STMicroelectronics生产的一款基于ARM Cortex-M3内核的高性能微控制器。这款MCU在资源和性能之间取得了良好的平衡,支持广泛的工业应用,包括电机控制、医疗和便携式设备等。其丰富的外设和内存配置,为开发者提供了极大的灵活性,无论是从基础的GPIO操作,还是复杂的通信协议实现,它都能胜任。
该款MCU包含了诸如ADC、DAC、多种通信接口(包括I2C、SPI、UART),以及高级定时器等特性,这些功能的结合使STM32F103VCT6成为物联网、数据采集和处理等多种应用的理想选择。
了解这款微控制器的基本架构对于开发人员至关重要,因为这将直接影响到软件设计和硬件选择。接下来的章节将详细探讨如何搭建开发环境、基础编程实践以及如何通过实际案例来深化理解。
# 2. 开发环境的搭建与配置
### 2.1 安装并配置Keil MDK-ARM开发环境
Keil MDK-ARM是ARM公司推出的适用于ARM处理器的集成开发环境,它提供了针对ARM处理器的软件开发和调试工具。Keil MDK-ARM集成了编译器、宏汇编器、链接器、库管理器、调试器等组件,是开发STM32F103VCT6项目的一个理想选择。
#### 2.1.1 下载安装Keil MDK-ARM
首先,访问Keil官方网站(http://www.keil.com/)下载最新版本的Keil MDK-ARM软件包。在选择产品版本时,务必确保选择与STM32F103VCT6处理器兼容的版本。安装过程中需要接受许可协议,然后遵循安装向导完成安装。通常,推荐安装在默认路径下,以避免潜在的环境变量问题。
#### 2.1.2 创建STM32F103VCT6项目
安装完成后,启动Keil MDK-ARM。首先,创建一个新的项目目录,然后在Keil软件中选择"Project"菜单,点击"New uVision Project..."。接下来,根据向导指定项目名称和路径,并选择目标设备STM32F103VCT6。
在项目创建向导中,你需要为项目添加必要的文件和组件。这通常包括但不限于启动文件、STM32F103VCT6的特定配置文件以及初始化代码。添加完成后,Keil MDK-ARM会生成一个项目骨架,你可以在此基础上进行代码编写和项目配置。
#### 2.1.3 配置项目选项和工具链
完成项目创建后,需要配置项目选项以确保编译器和链接器设置正确。在项目视图中双击"Options for Target"。在"Target"选项卡中设置晶振频率等硬件相关的参数;在"C/C++"选项卡中可以配置编译器的优化等级和其他预处理器定义;在"Output"选项卡中可以设置生成的输出文件类型,如二进制文件和十六进制文件。
确保工具链(Toolchain)设置为"Use MicroLIB",因为MicroLIB是针对资源受限的嵌入式系统设计的。这样配置后,编译器将生成更小的代码,有助于节省STM32F103VCT6有限的RAM和Flash资源。
完成这些配置后,你的Keil MDK-ARM开发环境就准备就绪,可以开始编写代码并进行编译调试了。
### 2.2 安装并配置ST-Link驱动
ST-Link是ST公司开发的用于STM32系列微控制器的调试器/编程器,与Keil MDK-ARM配合使用可以实现对STM32F103VCT6的快速编程和调试。
#### 2.2.1 下载安装ST-Link驱动程序
访问ST官网(https://www.st.com/)下载ST-Link驱动程序。按照向导指示完成安装。在安装过程中,建议使用管理员权限运行安装程序以避免权限问题。安装完成后,通常无需进行复杂的配置,因为ST-Link驱动程序会自动进行配置。
#### 2.2.2 测试ST-Link连接
安装好ST-Link驱动程序后,可以使用ST-Link Utility工具测试ST-Link与STM32F103VCT6之间的连接是否成功。启动ST-Link Utility,检查设备管理器中的ST-Link驱动程序是否正确加载,确保没有错误提示。
使用ST-Link Utility的"Connect"功能尝试连接目标设备。如果连接成功,说明ST-Link驱动程序配置正确,接下来你就可以在Keil MDK-ARM中进行项目的调试工作了。
### 2.3 熟悉STM32CubeMX工具
STM32CubeMX是ST公司推出的一个图形化工具,它可以帮助开发者快速配置STM32的硬件特性,并生成初始化代码。
#### 2.3.1 STM32CubeMX的安装与界面介绍
从ST公司官网下载STM32CubeMX安装包,遵循安装向导完成安装。STM32CubeMX界面分为几个主要区域:项目概览区域、配置区域、代码生成和项目管理区域。用户可以通过简单的点击操作配置微控制器的不同参数,如时钟树、GPIO配置、外设初始化等。
#### 2.3.2 使用STM32CubeMX进行项目初始化
在STM32CubeMX中创建一个新项目,选择相应的STM32F103VCT6芯片型号。接下来,使用图形化界面配置你的项目需求。比如,配置GPIO为输出模式用于LED控制,配置时钟树以满足项目对时钟频率的需求。
配置完成后,可以使用STM32CubeMX生成项目代码。在代码生成选项中,你可以指定生成的代码格式和框架,如是否使用HAL库。点击"GENERATE CODE"按钮,STM32CubeMX将根据你的配置生成完整的项目文件,这些文件可以直接导入Keil MDK-ARM中。
#### 2.3.3 生成代码和配置文件
生成的代码中包含了必要的头文件、源文件以及系统配置文件。在这些文件中,你会找到STM32F103VCT6的配置代码,包括时钟配置、外设初始化代码等。这些文件可以直接在Keil MDK-ARM中打开和编辑。
生成的配置文件(如stm32f1xx_hal_conf.h)中包含了HAL库的配置选项,例如是否启用某些外设的低功耗模式。仔细检查这些设置以确保它们符合你的项目需求。代码生成完成后,你就可以在Keil MDK-ARM中编译并调试项目了。
至此,开发环境的搭建与配置基本完成。接下来,你可以开始针对STM32F103VCT6进行基础编程实践,深入学习STM32的寄存器操作、使用HAL库编写应用程序、配置中断和定时器等。
# 3. 基础编程实践
## 3.1 熟悉STM32F103VCT6的寄存器操作
### 3.1.1 访问寄存器的方法
STM32F103VCT6的微控制器拥有众多可配置寄存器,理解这些寄存器是进行低级编程的基础。每个寄存器都与微控制器的不同功能相绑定,从简单的通用输入/输出(GPIO)到复杂的通信接口,例如USART、I2C和SPI。
要访问STM32的寄存器,开发者通常需要直接操作内存地址。在C语言中,这可以通过指针来实现。举一个例子,如果想通过位操作来控制GPIO的输出:
```c
#define GPIOC_ODR *(volatile uint32_t *)(0x48000800 + 0x14) // GPIO端口输出数据寄存器地址
#define GPIOC_MODER *(volatile uint32_t *)(0x48000800 + 0x00) // GPIO端口模式寄存器地址
// 设置GPIOC的第10位为输出模式
GPIOC_MODER &= ~(0b11 << (10*2));
GPIOC_MODER |= (0b01 << (10*2));
// 将GPIOC的第10位设置为高电平
GPIOC_ODR |= (1 << 10);
```
在此代码中,我们定义了两个指针,一个指向输出数据寄存器(ODR),另一个指向模式寄存器(MODER)。通过位操作,我们将GPIOC的第10位设置为推挽输出模式,并最终将其输出高电平。
### 3.1.2 基本的GPIO操作
GPIO(通用输入/输出)端口是微控制器中最基础且使用最广泛的部分。掌握GPIO的编程对于开发任何嵌入式系统至关重要。
最基本的操作包括配置GPIO引脚模式、输出类型、输出速度、上拉/下拉电阻等。以下是通过寄存器操作控制GPIO的一个例子:
```c
#define RCC_APB2ENR *(volatile uint32_t *)(0x40021018) // 使能GPIOC时钟
#define GPIOC_CRL *(volatile uint32_t *)(0x48000800) // GPIOC配置寄存器低8位
void GPIO_Config(void) {
RCC_APB2ENR |= (1 << 4); // 使能GPIOC时钟
GPIOC_CRL &= ~(0xF << (4*4)); // 清除第12到15位
GPIOC_CRL |= (0x2 << (4*4)); // 设置为模式2 (配置为推挽输出)
}
```
在上述代码中,我们首先通过修改RCC_APB2ENR寄存器,使能GPIOC的时钟。然后,我们通过操作GPIOC_CRL寄存器的相应位,将GPIOC的第12至15位配置为推挽输出模式。
## 3.2 利用HAL库编写简单的应用程序
### 3.2.1 HAL库的初始化流程
STM32 HAL库是一系列高级抽象API,它们封装了直接寄存器操作的复杂性,使开发者能够更快速、高效地开发。HAL库的初始化流程包括系统时钟配置、外设初始化和主循环控制等。
初始化流程一般如下:
```c
int main(void) {
HAL_Init(); // 初始化HAL库
SystemClock_Config(); // 配置系统时钟
MX_GPIO_Init(); // 初始化GPIO
while(1) {
// 主循环代码
}
}
void HAL_MspInit(void) {
__HAL_RCC_AFIO_CLK_ENABLE();
__HAL_RCC_PWR_CLK_ENABLE();
// 时钟配置...
}
void SystemClock_Config(void) {
// 设置系统时钟...
}
```
`HAL_Init()`函数初始化HAL库,配置时钟源,`SystemClock_Config()`函数负责设置系统时钟,而`MX_GPIO_Init()`则是初始化GPIO的具体函数。
### 3.2.2 编写一个简单的LED闪烁程序
在初始化LED所连接的GPIO之后,编写一个简单的LED闪烁程序就是HAL库编程的一个实际例子:
```c
void MX_GPIO_Init(void) {
GPIO_InitTypeDef GPIO_InitStruct = {0};
// 启用GPIO端口时钟
__HAL_RCC_GPIOC_CLK_ENABLE();
// 配置GPIOC第13号引脚为输出模式
GPIO_InitStruct.Pin = GPIO_PIN_13;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
}
int main(void) {
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
while(1) {
HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_13); // 切换GPIOC第13号引脚状态
HAL_Delay(500); // 延时500ms
}
}
```
在此程序中,`HAL_GPIO_TogglePin()`函数用于切换GPIO引脚的状态,`HAL_Delay()`函数用于延时,以便我们能够看到LED闪烁的效果。
## 3.3 中断与定时器的使用
### 3.3.1 配置和使用中断
中断允许微控制器响应紧急事件,例如外部信号或者内部事件的变化。正确配置和使用中断,对于实时系统尤其重要。
配置中断的过程一般包括:
1. 使能中断控制器的时钟。
2. 配置中断优先级。
3. 使能中断通道。
4. 实现中断服务函数。
```c
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef *htim) {
if (htim->Instance == TIM2) {
__HAL_RCC_TIM2_CLK_ENABLE();
HAL_NVIC_SetPriority(TIM2_IRQn, 1, 0);
HAL_NVIC_EnableIRQ(TIM2_IRQn);
}
}
void TIM2_IRQHandler(void) {
HAL_TIM_IRQHandler(&htim2);
}
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) {
if (htim->Instance == TIM2) {
// 执行周期性任务
}
}
```
在本例中,我们使能了TIM2的时钟并配置了中断优先级。在发生定时器中断时,`TIM2_IRQHandler()`会被调用,而`HAL_TIM_IRQHandler()`和`HAL_TIM_PeriodElapsedCallback()`则是HAL库中用于处理中断的标准函数。
### 3.3.2 定时器的设置和回调函数实现
定时器是微控制器中重要的定时功能模块。通过配置定时器,可以实现精确的时间控制和定时任务。
以下是使用HAL库配置定时器的步骤:
```c
void MX_TIM2_Init(void) {
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
htim2.Instance = TIM2;
htim2.Init.Prescaler = 83; // 预分频器值
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 9999; // 自动重装载寄存器的值
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
HAL_TIM_Base_Init(&htim2);
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
HAL_TIM_ConfigClockSource(&htim2, &sClockSourceConfig);
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig);
}
int main(void) {
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_TIM2_Init();
HAL_TIM_Base_Start_IT(&htim2); // 启动定时器中断
while(1) {
// 主循环代码
}
}
```
在该段代码中,`MX_TIM2_Init()`函数首先初始化定时器TIM2,并通过`HAL_TIM_Base_Init()`设置预分频器和自动重装载寄存器的值。然后通过`HAL_TIM_Base_Start_IT()`函数启动定时器中断。
这样,当定时器计数达到预设的周期时,就会触发中断,并在`HAL_TIM_PeriodElapsedCallback()`函数中执行回调逻辑。
请注意,以上代码仅作为示例,根据不同的应用场景,代码的配置项可能需要相应地调整。
# 4. 外围设备的应用开发
## 4.1 串口通信的实现
串口通信是微控制器与外部设备进行数据交换的重要方式之一。这一节我们将深入了解如何在STM32F103VCT6上实现串口通信。
### 4.1.1 串口初始化和配置
在开发板上,STM32F103VCT6通常提供多个USART(通用同步/异步收发传输器)接口,用于串口通信。初始化串口涉及配置波特率、数据位、停止位和校验位等参数。以下是串口初始化的基本步骤:
- **确定引脚映射**:首先确定使用哪一对引脚作为TX(发送)和RX(接收)。
- **配置时钟**:为USART外设配置并启用时钟。
- **配置GPIO**:将用于TX和RX的GPIO引脚设置为复用功能模式。
- **初始化USART**:配置USART工作参数,并启用其。
- **中断或轮询**:选择是否使用中断来处理接收到的数据,还是使用轮询方式。
代码块示例如下:
```c
/* 代码初始化USART1 */
#include "stm32f1xx_hal.h"
void USART1_Init(void) {
/* 定义一个USART_HandleTypeDef类型的结构体 */
USART_HandleTypeDef huart1;
/* 开启GPIOA和USART1时钟 */
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_USART1_CLK_ENABLE();
/* 配置USART1 TX为复用推挽输出 */
GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.Pin = GPIO_PIN_9; // PA9 作为TX
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* 配置USART1 RX为输入浮空 */
GPIO_InitStruct.Pin = GPIO_PIN_10; // PA10 作为RX
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* 配置USART1 */
huart1.Instance = USART1;
huart1.Init.BaudRate = 9600; // 设置波特率
huart1.Init.WordLength = UART_WORDLENGTH_8B; // 数据位为8位
huart1.Init.StopBits = UART_STOPBITS_1; // 1个停止位
huart1.Init.Parity = UART_PARITY_NONE; // 无奇偶校验位
huart1.Init.Mode = UART_MODE_TX_RX; // 收发模式
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE; // 无硬件流控制
huart1.Init.OverSampling = UART_OVERSAMPLING_16; // 16倍过采样
if (HAL_UART_Init(&huart1) != HAL_OK) {
/* 初始化错误处理 */
}
}
```
参数说明:
- `BaudRate`:设置通信的波特率,例如9600。
- `WordLength`:设置数据帧的长度,8位表示一帧数据包含8个数据位。
- `StopBits`:设置停止位的数量。
- `Parity`:设置奇偶校验位的类型。
- `Mode`:设置USART的模式,例如仅发送(TX),仅接收(RX),或者两者都用。
- `HwFlowCtl`:设置硬件流控制的类型,本例中不使用。
- `OverSampling`:设置过采样倍数,16倍为常用设置。
### 4.1.2 实现串口数据收发
在初始化串口之后,我们可以使用`HAL_UART_Transmit`和`HAL_UART_Receive`等函数来发送和接收数据。在实际项目中,我们可能会编写相应的中断服务例程(ISR),或者使用DMA(Direct Memory Access)来处理大量数据的发送和接收。
以下是使用轮询方式发送和接收数据的简单示例:
```c
/* 发送数据 */
uint8_t data[] = "Hello, UART!";
HAL_UART_Transmit(&huart1, data, sizeof(data), 1000);
/* 接收数据 */
uint8_t buffer[10];
HAL_UART_Receive(&huart1, buffer, sizeof(buffer), 1000);
```
参数说明:
- `huart1`:在上一步初始化中创建的`USART_HandleTypeDef`类型的句柄。
- `data`:指向要发送的数据的指针。
- `sizeof(data)`:要发送的数据字节数。
- `1000`:超时时间,单位毫秒。
## 4.2 ADC和DAC的应用
### 4.2.1 ADC的配置和数据读取
模拟数字转换器(ADC)是将模拟信号转换为数字信号的接口,而数字模拟转换器(DAC)则是将数字信号转换为模拟信号。STM32F103VCT6内部集成了12位分辨率的ADC和DAC。
配置ADC包括以下步骤:
- **确定引脚**:选择相应的引脚作为ADC通道。
- **配置时钟和GPIO**:为ADC和相应的GPIO外设开启时钟,并将引脚设置为模拟输入。
- **初始化ADC**:设置ADC的分辨率、扫描模式、数据对齐方式等参数,并使能ADC。
- **开始转换**:启动ADC进行数据采样。
数据读取可以使用阻塞方式或中断方式:
```c
/* 配置ADC */
void ADC_Configuration(void) {
/* ADC初始化代码 */
}
/* 开始ADC转换 */
void ADC_StartConversion(ADC_HandleTypeDef* hadc) {
HAL_ADC_Start(hadc);
}
/* 等待转换完成并读取数据 */
uint32_t ADC_ReadData(ADC_HandleTypeDef* hadc) {
HAL_ADC_PollForConversion(hadc, HAL_MAX_DELAY);
return HAL_ADC_GetValue(hadc);
}
```
### 4.2.2 DAC的配置和输出实现
DAC的配置和ADC类似,主要区别在于设置DAC而非ADC的外设。
- **配置时钟和GPIO**:为DAC开启时钟,并将相应的GPIO引脚配置为模拟输出。
- **初始化DAC**:设置DAC的工作模式和输出缓冲。
- **输出模拟值**:通过写入DAC数据寄存器设置输出值。
```c
/* 配置DAC */
void DAC_Configuration(void) {
/* DAC初始化代码 */
}
/* 设置DAC输出值 */
void DAC_SetValue(DAC_HandleTypeDef* hdac, uint16_t value) {
HAL_DAC_SetValue(hdac, value);
}
```
## 4.3 I2C与SPI通信协议的实践
### 4.3.1 I2C设备的配置和数据传输
I2C(Inter-Integrated Circuit)是一种多主机的串行通信总线。STM32F103VCT6支持硬件I2C接口,可以通过`HAL_I2C_Mem_Write`和`HAL_I2C_Mem_Read`等函数实现对I2C设备的读写操作。
配置I2C的步骤包括:
- **确定引脚**:选择SCL(时钟线)和SDA(数据线)对应的GPIO引脚。
- **配置时钟和GPIO**:为I2C外设和相应的GPIO引脚开启时钟,并设置引脚为复用开漏输出。
- **初始化I2C**:设置I2C的工作速率(如100 kHz)和地址模式(7位或10位)。
- **进行数据传输**:根据需要实现读或写操作。
```c
/* 配置I2C */
void I2C_Configuration(void) {
/* I2C初始化代码 */
}
/* 写入I2C设备 */
HAL_StatusTypeDef I2C_Write(uint16_t DevAddress, uint16_t MemAddress, uint8_t *pData, uint16_t Size) {
return HAL_I2C_Mem_Write(&hi2c1, DevAddress, MemAddress, I2C_MEMADD_SIZE_8BIT, pData, Size, HAL_MAX_DELAY);
}
/* 从I2C设备读取 */
HAL_StatusTypeDef I2C_Read(uint16_t DevAddress, uint16_t MemAddress, uint8_t *pData, uint16_t Size) {
return HAL_I2C_Mem_Read(&hi2c1, DevAddress, MemAddress, I2C_MEMADD_SIZE_8BIT, pData, Size, HAL_MAX_DELAY);
}
```
### 4.3.2 SPI设备的配置和数据通信
SPI(Serial Peripheral Interface)是一种高速、全双工、同步的通信总线。STM32F103VCT6也支持硬件SPI接口,配置SPI设备同样涉及引脚、时钟和GPIO的配置。
配置SPI的步骤包括:
- **确定引脚**:选择SPI总线上的SCK(时钟线)、MISO(主设备数据输入线)、MOSI(主设备数据输出线)和CS(片选信号)对应的GPIO引脚。
- **配置时钟和GPIO**:为SPI外设和相应的GPIO引脚开启时钟,并设置相应的复用功能。
- **初始化SPI**:设置SPI的通信参数,如主从模式、时钟极性和相位、数据帧大小(8位或16位)等。
- **进行数据通信**:通过`HAL_SPI_Transmit`、`HAL_SPI_Receive`和`HAL_SPI_TransmitReceive`等函数实现数据的发送和接收。
```c
/* 配置SPI */
void SPI_Configuration(void) {
/* SPI初始化代码 */
}
/* SPI数据发送 */
HAL_StatusTypeDef SPI_Transmit(SPI_HandleTypeDef* hspi, uint8_t *pData, uint16_t Size, uint32_t Timeout) {
return HAL_SPI_Transmit(hspi, pData, Size, Timeout);
}
/* SPI数据接收 */
HAL_StatusTypeDef SPI_Receive(SPI_HandleTypeDef* hspi, uint8_t *pData, uint16_t Size, uint32_t Timeout) {
return HAL_SPI_Receive(hspi, pData, Size, Timeout);
}
```
通过本章的介绍,我们了解了如何在STM32F103VCT6上实现串口、ADC/DAC以及I2C/SPI通信协议的应用开发。这些基础外围设备的掌握将为实现更复杂的功能打下坚实的基础。在下一章中,我们将进一步探讨项目构建、调试技巧以及综合应用案例。
# 5. 项目构建与调试技巧
## 5.1 调试前的准备工作
在开始项目调试之前,充分的准备工作是必不可少的。它不仅有助于提高调试的效率,还能在一定程度上保证调试过程的顺利进行。
### 5.1.1 编写测试用例
编写测试用例是项目开发中不可忽视的步骤。测试用例的编写应基于项目需求和功能点,包含但不限于所有模块的边界值和异常情况。这些用例将用于验证功能的正确性,以及潜在的性能问题。
```c
// 示例代码:编写测试用例框架
#include "unity.h"
void setUp(void) {
// 初始化测试环境
}
void tearDown(void) {
// 清理测试环境
}
void test_led_initialization(void) {
// 测试LED初始化功能
TEST_ASSERT_EQUAL(1, LED_Init());
}
void test_button_press(void) {
// 测试按钮按下功能
TEST_ASSERT_EQUAL(1, Button_Press());
}
int main(void) {
UNITY_BEGIN();
RUN_TEST(test_led_initialization);
RUN_TEST(test_button_press);
return UNITY_END();
}
```
代码解析:在上述示例中,使用了Unity测试框架来编写测试用例。`setUp`和`tearDown`函数分别在每个测试函数前后运行,用于设置和清理测试环境。`RUN_TEST`宏用于运行各个测试函数。
### 5.1.2 使用逻辑分析仪辅助调试
逻辑分析仪是一种强大的调试工具,它能帮助开发者观察和记录多通道数字信号的变化。在调试STM32F103VCT6时,可以将逻辑分析仪连接到MCU的引脚,观察程序运行时的信号波形,帮助定位问题所在。
逻辑分析仪的应用通常包括以下几个步骤:
1. 选择合适的采样速率。
2. 将逻辑分析仪的探头连接到目标引脚。
3. 配置逻辑分析仪的触发条件。
4. 开始捕获数据并分析波形。
## 5.2 常见错误的排查和解决方法
在开发过程中,难免会遇到各种问题,这些错误可能会导致程序崩溃、性能下降或功能失效。
### 5.2.1 内存泄漏和栈溢出问题
内存泄漏和栈溢出是嵌入式开发中常见的问题。STM32F103VCT6作为资源有限的MCU,这些问题会导致系统不稳定。
排查方法:
- 使用静态代码分析工具检测内存泄漏。
- 监控堆内存使用情况。
- 通过栈溢出检查器来监控栈的使用。
解决策略:
- 优化内存管理,避免不必要的动态内存分配。
- 使用内存池管理。
- 设置合理的栈大小。
### 5.2.2 中断优先级配置错误
中断优先级配置错误会导致中断响应不正确,可能导致程序行为异常或系统不稳定。
排查方法:
- 检查中断优先级配置是否符合预期。
- 使用调试器查看中断状态和优先级配置。
- 分析程序逻辑确保中断服务程序的执行不会被意外中断。
解决策略:
- 理解并正确配置STM32的中断优先级机制。
- 将关键中断优先级设置高于非关键中断。
- 避免嵌套中断处理中出现的优先级反转问题。
## 5.3 系统性能的优化技巧
性能优化是开发过程中不断进行的任务,旨在提升系统的响应速度和运行效率。
### 5.3.1 代码优化
代码优化可以从多个角度进行,包括但不限于算法优化、循环优化、函数调用优化等。
优化方法:
- 选择高效的算法和数据结构。
- 减少不必要的计算和循环。
- 使用内联函数减少函数调用开销。
- 避免在中断服务程序中使用延时函数。
### 5.3.2 外设时序的优化
STM32F103VCT6的外设时序对系统性能有很大影响。正确的外设时序配置可以提高数据传输的效率。
优化方法:
- 根据外设数据手册配置时序参数。
- 使用DMA(直接内存访问)减少CPU负担。
- 优化外设驱动程序,减少上下文切换和中断延迟。
通过以上方法,可以有效提升系统的性能和稳定性,确保最终产品的质量。
以上内容展示了项目构建与调试技巧的详细讲解,从测试用例编写、逻辑分析仪的使用、常见错误排查到系统性能优化的多个方面进行了深入的分析和说明。这些技巧在实际开发过程中是提高开发效率和程序性能的关键。接下来的内容将继续深入介绍如何应用这些技巧解决实际问题,以及优化项目开发流程。
# 6. 综合应用案例分析
## 6.1 制作一个基于STM32F103VCT6的简易示波器
在这一节中,我们将一起制作一个简易示波器,它能够作为学习和测试工具用于多种场合。这个项目不仅能够帮助我们加深对STM32F103VCT6微控制器的理解,还可以让我们熟悉示波器的基本工作原理。
### 6.1.1 硬件设计要点
要创建一个简易示波器,我们需要以下几个硬件组件:
1. **STM32F103VCT6微控制器**: 作为处理核心,用于采样模拟信号并进行处理。
2. **ADC模块**: 必须具有足够的采样速率和精度来采集模拟信号。
3. **显示屏**: 用于实时显示采集到的波形数据。可以选择OLED或LCD屏幕。
4. **用户输入**: 如按钮或触摸屏,以便用户可以调整设置,如增益、偏移和采样速率。
5. **电源管理模块**: 确保系统稳定供电。
在设计时,考虑到STM32F103VCT6的引脚分配和ADC的性能参数,我们选择STM32自带的ADC模块,并使用SPI接口连接到LCD显示屏。
### 6.1.2 软件设计思路和实现
#### 软件架构
我们的软件将分为几个部分:
1. **初始化**: 包括系统时钟、ADC模块、SPI接口和显示屏。
2. **采样循环**: 持续采集输入信号,并实时更新显示屏。
3. **用户交互**: 处理用户输入,调整示波器设置。
#### 代码实现
下面是一个简化的代码示例,展示如何初始化STM32F103VCT6的ADC模块和显示屏。
```c
// ADC初始化函数
void ADC_Init(void) {
// ADC时钟使能
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1, ENABLE);
// ADC1配置
ADC_InitTypeDef ADC_InitStructure;
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent;
ADC_InitStructure.ADC_ScanConvMode = DISABLE;
ADC_InitStructure.ADC_ContinuousConvMode = ENABLE;
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None;
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;
ADC_InitStructure.ADC_NbrOfChannel = 1;
ADC_Init(ADC1, &ADC_InitStructure);
// 配置ADC通道
ADC_RegularChannelConfig(ADC1, ADC_Channel_10, 1, ADC_SampleTime_55Cycles5);
// 启动ADC
ADC_Cmd(ADC1, ENABLE);
// 初始化ADC校准寄存器
ADC_ResetCalibration(ADC1);
while(ADC_GetResetCalibrationStatus(ADC1));
// 开始ADC校准
ADC_StartCalibration(ADC1);
while(ADC_GetCalibrationStatus(ADC1));
}
// 显示屏初始化函数
void Display_Init(void) {
// 初始化SPI接口
// 初始化显示屏控制引脚
// 发送初始化指令到显示屏
// 显示屏进入绘图模式
}
// 主函数
int main(void) {
SystemInit(); // 系统初始化
ADC_Init(); // ADC初始化
Display_Init(); // 显示屏初始化
while(1) {
// 主循环
// 读取ADC值
// 更新显示屏
}
}
```
以上代码只是一个框架,实际项目中需要根据硬件配置详细编写初始化参数和数据处理逻辑。
## 6.2 开发一个基于触摸屏的用户界面
用户界面是应用程序中最重要的部分之一,尤其是当用户通过触摸屏与设备交互时。接下来,我们将探讨如何为STM32F103VCT6开发一个基于触摸屏的用户界面。
### 6.2.1 触摸屏的初始化和驱动
触摸屏的初始化包括硬件接口的初始化和触摸屏控制器的初始化。硬件接口通常为SPI或I2C,而控制器可能有专用的初始化代码。以下是一个触摸屏初始化的代码片段:
```c
// 触摸屏控制器初始化函数
void TouchScreen_Init(void) {
// 初始化I2C或SPI接口
// 配置触摸屏控制器
// 激活触摸屏控制器
}
```
在实际应用中,触摸屏的初始化还涉及与STM32的中断系统结合,以响应触摸事件。
### 6.2.2 用户界面的搭建与交互逻辑
在开发用户界面时,我们需要设计界面布局和响应触摸事件的逻辑。以下是一个简单的交互逻辑的示例:
```c
// 触摸事件处理函数
void TouchEvent_Handler(void) {
if (IsTouchDetected()) {
// 获取触摸坐标
int x, y;
GetTouchCoordinates(&x, &y);
// 根据坐标判断触摸了哪个控件,执行相应的逻辑
if (x > SOME_X_THRESHOLD) {
// 执行一个动作
}
}
}
```
实现用户界面不仅需要编写代码,还需要设计图形元素,如按钮、滑动条等,来帮助用户实现与设备的交互。
## 6.3 实现蓝牙模块的数据通信
蓝牙技术的集成可以让我们的设备与其它蓝牙设备无线通信,为设备扩展更多功能。
### 6.3.1 蓝牙模块的选型与连接
对于STM32F103VCT6,我们可以选择如HC-05或HC-06这样的蓝牙模块进行连接。连接方式通常是通过串口进行的。硬件连接后,我们需要配置微控制器的串口来与蓝牙模块通信。
```c
// 串口初始化函数
void USART_Init(void) {
// 串口时钟使能
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART1, ENABLE);
// USART配置
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1, &USART_InitStructure);
// 启动串口
USART_Cmd(USART1, ENABLE);
}
```
### 6.3.2 蓝牙通信协议的实现
蓝牙通信协议的实现包括了数据的打包、发送、接收和解析。下面是一个简单的数据发送示例:
```c
// 发送数据到蓝牙设备
void SendDataToBluetooth(uint8_t* data, uint16_t size) {
for(uint16_t i = 0; i < size; i++) {
while(USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET);
USART_SendData(USART1, data[i]);
}
}
```
在实际应用中,还需要处理接收数据的情况,并根据应用的需求解析接收到的数据。
在本章中,我们通过示波器、触摸屏用户界面和蓝牙通信三个不同领域的应用案例,讨论了STM32F103VCT6的综合应用开发。这些案例能够帮助我们从不同角度深入理解STM32F103VCT6的开发实践。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
SQL Server 2014性能调优指南:5大技巧让你的数据库飞起来
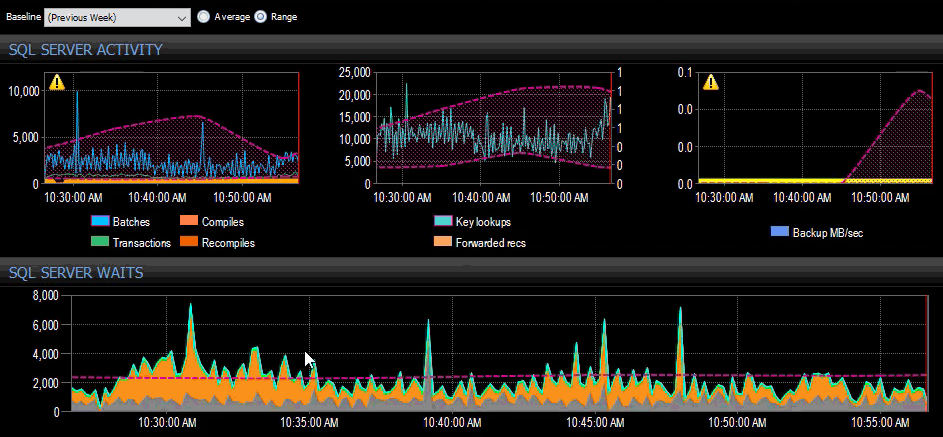
# 摘要
本文针对SQL Server 2014的性能调优进行了全面概述,旨在帮助数据库管理员和开发人员提高数据库性能和管理效率。文章首先介绍了性能调优的基本概念和关键性能指标,然后深入探讨了如何识别性能瓶颈,并利用各种监控工具和资源管理方法对系统性能进行评估。在此基础上,文章详细阐述了优化SQL Server配置的策略,包括实例级配置、数据库文件配置以及存储过程和索引的优化。此外
Xshell7串口会话管理:多任务并发处理的艺术
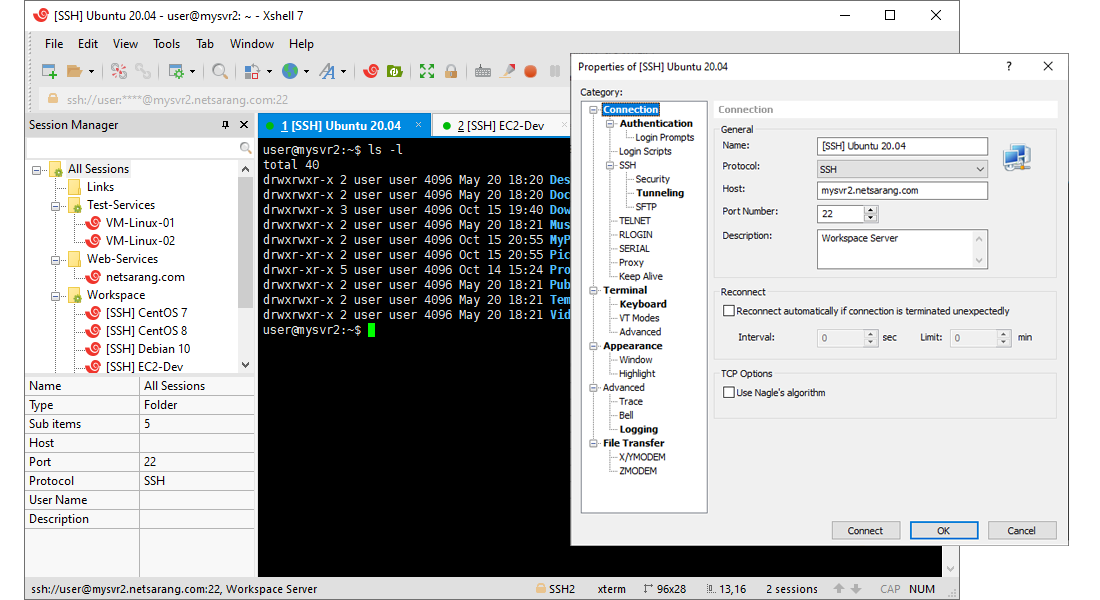
# 摘要
本文旨在深入探讨Xshell7在串口会话管理中的应用与优化,重点分析多任务并发处理的基础知识及其在串口通信中的实际应用。通过对Xshell7的基本配置、高级技巧以及性能优化策略的讨论,阐述了如何有效地管理串口会话,并确保会话的稳定性和安全性。文章还进一步探讨了安全策略在会话管理中的重要性,以及如何处理多任务并发时的资源冲突。最后,文章展望了未来技术趋势,包括云计算和人工智能在串口会话管理中的潜在创新应用。
【Layui-laydate时间日历控件入门】:快速上手与基础应用技巧揭秘
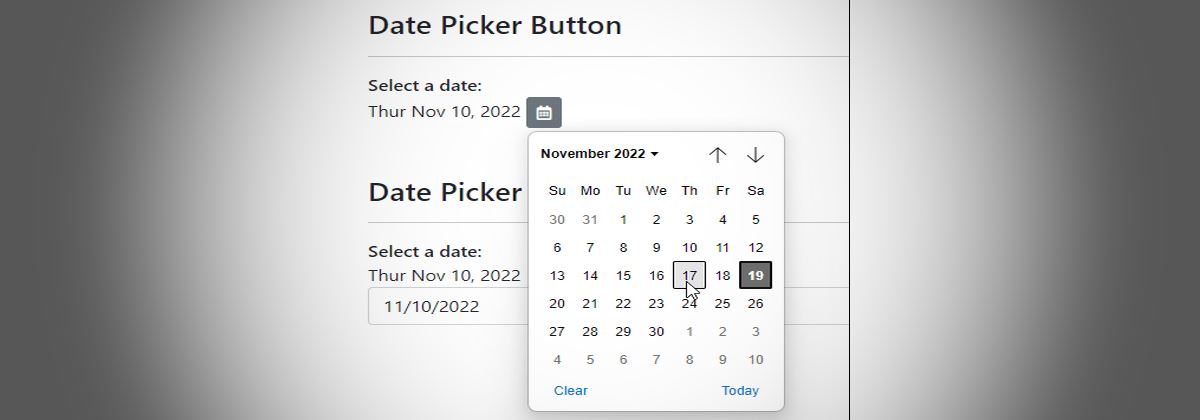
# 摘要
Layui-laydate是一个流行的前端JavaScript时间日历控件,广泛应用于网页中提供用户友好的日期选择功能。本文对Layui-laydate的核心概念、工作原理、配置、初始化以及日期格式和本地化支持进行了详细概述。同时,本文介绍了Layui-laydate的基本使用方法,包括
【HDMI转EDP开发环境搭建指南】:必备步骤与精选工具
# 摘要
HDMI转EDP技术的转换在显示设备领域具有重要意义,能够实现不同数字接口之间的有效连接。本文首先对HDMI转EDP技术进行了概述,接着详细介绍了开发环境的搭建,包括硬件连接、软件环境配置和开发工具链的安装。随后,文章深入探讨了HDMI转EDP开发实践,涵盖了驱动程序开发基础、转换协议理解和应用、以及性能优化与故障排除。高级开发工具和技巧章节,介绍了仿真、调试和自动化开发过程的工具使用。最后,通过
MySQL权威故障解析:一次搞懂ERROR 1045 (28000)

# 摘要
ERROR 1045 (28000)是MySQL数据库中一个常见的用户认证错误,此错误通常与用户权限管理不当有关。本文首先介绍了MySQL的基本概念和ERROR 1045错误的概况,然后深入分析了ERROR 1045产生的理论基础,包括用户认证流程、权限系统的结构及其错误处理机制。在此基
交互至上:数字密码锁用户界面设计优化指南

# 摘要
本文深入探讨数字密码锁用户界面设计的关键要素,从设计原则到实践方法进行了全面阐述。首先介绍了用户界面设计的基本原则,用户体验理论,以及界面设计与用户认知的关系。然后详细讨论了界面设计的实践方法,包括用户研究、需求分析、设计流程、原型设计和用户测试。在优化实践部分,重点分析了界面布局、交互元素设计,以及安全性和隐私保护。第五章探讨了高级设计技巧和新兴趋势,而最后章节着重于评估与迭代过程,强调了数据驱动的优化和案例
紧急升级!IBM SVC 7.8兼容性问题解决方案大全
# 摘要
本文详细探讨了IBM SVC 7.8版本的兼容性问题,分析了问题的根源,并讨论了其对系统性能和数据完整性的潜在影响。通过提出兼容性测试、评估报告、临时解决方案以及根本解决方案等多种预防和应对措施,文章为解决IBM SVC 7.8的兼容性问题提供了一套完整的实践方案。案例研究表明,正确诊断和应对兼容性问题能够显著降低风险,提升系统稳定性。文章最后展望了兼容性问题的未来发展趋势,并提出了相应的预防和管理
SARScape高级应用必修课:复杂场景下精确裁剪的秘密

# 摘要
本文对SARScape软件进行全面介绍和深入分析,涵盖了软件核心算法、应用场景的处理技巧以及高级实践应用。SARScape算法的理论框架及其与现实世界数据的关联被详细解析,强调了参数调优对于不同应用场景的重要性,并通过实际案例展示算法性能。此
揭秘网络变压器:5大核心参数与应用诀窍,提升设计效率
# 摘要
网络变压器作为电子和通信设备中不可或缺的组件,其性能直接关系到数据传输的效率和质量。本文从基础概念与分类出发,详细阐述了网络变压器的核心参数,包括阻抗匹配、隔离度与共模抑制、频率范围与带宽、插损与传输效率以及温度稳定性与寿命。通过对这些参数的深入解析,本文进一步探讨了网络变压器在以太网、无线通信和工业自动化等不同领域的应用,并分析了其在设计与实践中应注意的问题。文章最后展望了网络变压器的创新设计趋势,如新型材料的运用、智能化与模块化设计以及节能减排技术,旨在为行业提供指导和参考。
# 关键字
网络变压器;阻抗匹配;隔离度;频率范围;传输效率;智能化设计
参考资源链接:[网络变压器
【Qt串口通信进阶技能】:高级数据封装与解封装,提升编程效率

# 摘要
本文回顾了Qt串口通信的基础知识,并深入探讨了数据封装与解封装的理论和技术细节。通过分析数据封解装的重要性、方法、算法和性能影响因素,文章阐述了在Qt环境下实现数据封解装的技术和应用实例。接着,提出了优化Qt串口通信编程效率的多种技巧,包括编码优化策略、使用Qt工具与库的高级应用,以及性能调优与故障排查。最后,本文通过一个实战案例,展示了数据封解装在实际项目中的
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )