GRBL自动化工作流程:创建与优化自动化脚本的实践指南
发布时间: 2024-12-14 00:24:08 阅读量: 4 订阅数: 6 

FTP上传下载工具,支持上传下载文件夹、支持进度更新.7z

参考资源链接:[GRBL设置与Arduino UNO操作指南](https://wenku.csdn.net/doc/6401ac64cce7214c316ebad2?spm=1055.2635.3001.10343)
# 1. GRBL自动化工作流程概述
在当今制造业和DIY爱好者中,GRBL已成为CNC机床自动化的首选解决方案。本章节旨在介绍GRBL自动化工作流程的核心要素,为读者提供一个全面的概览。
## 1.1 GRBL自动化简介
GRBL是一个开源固件,专门为CNC机器设计,它将计算机或微控制器的G代码指令转换成精确的电机运动。通过利用GRBL,可以从简单的DIY项目到复杂的工业应用中实现高效、成本效益高的自动化。
## 1.2 工作流程概述
GRBL自动化工作流程可以概括为以下几个步骤:
1. 设计或导入所需加工的零件的CAD图纸。
2. 利用CAM软件将CAD设计转换成G代码。
3. 将G代码文件传输到运行GRBL固件的微控制器。
4. 在CNC机床上加载GRBL固件,根据G代码进行自动加工。
这个流程涉及从设计到最终产品产出的每一个阶段,确保每一步都是精确和高效的。接下来的章节将详细解析GRBL的基础配置,以及如何将它与CNC机床集成。
# 2. GRBL基础与配置
## 2.1 GRBL软件介绍
### 2.1.1 GRBL的功能和应用场景
GRBL是一个开源的、基于Arduino平台的固件,旨在将常见的步进电机和伺服电机转换成精确的运动控制系统。这些系统通常用于CNC(计算机数控)机床,如铣床、激光切割机和3D打印机。GRBL的主要功能是将G代码(一种用于控制CNC机器的语言)转换为电机的实时运动控制。
GRBL在小型工作室和爱好者中非常流行,因为它小巧、易于安装、配置简单且功能强大。由于其开源性质,GRBL拥有一个活跃的社区,不断对其进行改进和增加新功能。从个人爱好者到小型生产企业的各种应用场景中,GRBL都能提供相对较高的性能,对于需要低成本且高效的数控解决方案的用户来说是一个理想选择。
### 2.1.2 GRBL的硬件要求和兼容性
为了运行GRBL固件,你的硬件平台必须具备以下基本要求:
- **Arduino兼容板**: GRBL通常运行在诸如Arduino Uno、Arduino Mega等兼容板上。
- **步进电机**: 用于控制机床的运动。
- **驱动器**: 如步进电机驱动器,用于提供足够的电流和电压。
- **电源**: 为Arduino和电机驱动器供电。
GRBL与其他一些硬件的兼容性也非常好,例如A4988、DRV8825等步进电机驱动器,和诸如GRBL-Shield这样的专门制作的控制板。对于接口,GRBL可以支持串行、USB转串行适配器,甚至可以通过WiFi模块实现无线控制。重要的是,为了充分发挥GRBL的潜力,所有的硬件组件都应保证质量并配置得当。
## 2.2 GRBL参数设置与调整
### 2.2.1 参数配置的理论基础
GRBL参数调整是控制CNC机床性能的关键。参数设置包括速度、加速度、步进电机的微步数等,这些都直接影响到机床的工作效率和精度。GRBL使用了若干个参数变量,通过修改这些变量值,可以精确控制CNC机床的运动。
了解这些参数意味着需要深入理解GRBL的工作原理。例如,参数`$110`控制着X轴的最大速率,而`$111`控制Y轴的最大速率。这些参数必须根据实际硬件的能力进行调整,以避免过载或精度损失。
### 2.2.2 实际操作:调整GRBL参数
调整GRBL参数通常需要使用串行终端程序,如PuTTY或Tera Term。首先,你需要通过串行连接将计算机与Arduino板连接起来。然后,使用控制台命令来查看和修改参数。下面是一个简单的步骤:
1. 连接GRBL到计算机:
```shell
// 打开串行终端并连接至指定串行端口
$$$
// 进入GRBL的配置模式
```
2. 查看当前的参数设置:
```shell
? // 查询所有参数的当前值
```
3. 修改一个参数的值,如调整X轴最大速度:
```shell
$110=1000 // 将X轴的最大速度设置为1000mm/min
```
4. 保存并恢复默认设置:
```shell
$RST // 重置GRBL到默认设置
$X // 存储设置并重启系统
```
调整参数时,每次修改后都应测试其影响,确保新设置不会导致机床超负荷或精度问题。
## 2.3 GRBL与CNC机床的整合
### 2.3.1 连接GRBL到CNC机床
将GRBL连接到CNC机床,是将软件固件与硬件设备结合的第一步。首先,你需要正确连接Arduino板到步进电机驱动器以及必要的外围设备。然后,配置GRBL使其与机床的电气特性相匹配。
整合过程大致分为以下几个步骤:
1. **布线**:确保所有组件正确且安全地连接。步进电机线应连接到驱动器,然后将驱动器连接到Arduino的步进电机输出端口。
2. **供电**:给步进电机和驱动器提供合适的电源,并确保Arduino板也接通了电源。
3. **初始化连接**:将Arduino板连接到计算机,使用串行终端软件与GRBL建立通信。
4. **测试通信**:通过发送命令`$$$`来测试连接是否成功,并通过`?`来检查是否能够从GRBL获取响应。
5. **进行配置**:根据CNC机床的具体参数配置GRBL的相关设置。
### 2.3.2 校准和测试整合流程
整合GRBL到CNC机床是一个校准和测试的过程,目的是确保所有的组件能够协同工作,输出的机械动作符合预期。这一阶段的关键步骤包括:
1. **轴校准**:调整各轴的原点位置,确保机床的运动与GRBL发出的指令同步。
2. **运动测试**:逐一测试X、Y、Z轴的运动,检查步进电机是否响应正确,运动是否平滑。
3. **速度和加速度测试**:通过实际操作调整GRBL参数,如`$110`和`$111`,测试不同的速度和加速度值,以找到最佳的性能平衡点。
4. **软件集成测试**:如果使用CAM软件,确保GRBL能够接收并正确执行生成的G代码。
5. **最终测试和调整**:全面测试整合后的CNC机床,包括复杂路径、尺寸精度和运行稳定性,根据测试结果进行必要的调整。
以上步骤完成后,GRBL和CNC机床的整合应已完成,接下来就可进行实际的生产操作。
在本章节中,我们介绍了GRBL软件的基础知识,并对如何配置和调整GRBL进行了深入的探讨,这些都是实现CNC机床自动化控制的重要步骤。在下一章中,我们将深入学习如何通过GRBL进行自动化脚本编程,这是将GRBL与CNC机床整合之后迈向实际应用的下一步。
# 3. GRBL自动化脚本编程
GRBL自动化脚本编程赋予了CNC机床更强大的智能化与自动化能力。通过掌握G代码的基础知识,结合GRBL的高级功能,可以编写出功能强大的自动化脚本,显著提升生产效率和加工精度。本章节将深入探讨G代码的结构、语法规则、以及如何通过GRBL进行脚本的编写、编辑、调试和测试。
## 3.1 G代码基础知识
### 3.1.1 G代码的结构和语法规则
G代码是数控编程语言,用于指导机床进行各种操作,包括移动、切割、设置和改变工具等。了解其结构和语法规则,对于编写自动化脚本至关重要。
首先,G代码由一系列指令组成,这些指

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏提供 GRBL 设置的全面指南,涵盖从入门到高级技巧。从快速设置和调试到故障排除和通信协议,您将掌握 GRBL 的方方面面。此外,专栏还探讨了 GRBL 与 CNC 机器人的集成,以及如何优化硬件以提升步进电机精度。安全升级和回滚策略确保您的机器稳定可靠。深入了解 GRBL 的安全特性,防止失控并维护机器稳定性。I_O 控制和传感器部分提供扩展模块的应用指南。专栏还介绍了高速加工方案,提升生产效率。最后,您将了解 GRBL 开源社区,获得最佳技术支持和帮助。
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
小米鲁班MTB软件深度剖析:掌握设计精髓,实现高效开发

参考资源链接:[小米手机鲁班MTB V6.0.5-13-33软件参数调整指南](https://wenku.csdn.net/doc/jmd7inyjra?spm=1055.2635.3001.10343)
# 1. 小米鲁班MTB软件概述
小米鲁班MTB软件作为小米公司的新一代管理工具,为企业的项目管
【RX N5多任务处理】:提升性能的4项关键策略

参考资源链接:[Nextchip N5 RX规格书v0.0版本发布](https://wenku.csdn.net/doc/45bayfzh7a?spm=1055.2635.3001.10343)
# 1. 多任务处理在RX N5中的重要性
多任务处理是现代操作系统和微处理器设计的关键组成部分。随着计算机科学的
三菱M70参数全面解读:5步优化设备性能的秘密武器

参考资源链接:[三菱M70关键参数详解:系统、轴数与控制设置](https://wenku.csdn.net/doc/249i46rdgf?spm=1055.2635.3001.10343)
# 1. 三菱M70数控系统的概述
数控系统是现代制造业的核心,它决定着机械设备运行的精度与效率。三菱M70数控系统作为业界一款较为先进的数控系统,广泛应用于各种精密加工设备中。它具备多种高级功能,如自适应控制、多
ELMO驱动器故障急救手册:10大常见问题及快速解决方案
参考资源链接:[ELMO驱动器配置与故障排除指南](https://wenku.csdn.net/doc/6462df54543f844488998bf7?spm=1055.2635.3001.
Sentinel-1 数据集分析:SNAP 遥感数据处理的高效之道

参考资源链接:[SNAP教程:哨兵-1 SAR数据处理入门与关键操作](https://wenku.csdn.net/doc/6401abc5cce7214c316e9718?spm=1055.2635.3001.10343)
# 1. 遥感数据处理概述
遥感技术是通过不
GeoDa坐标系转换完全指南:地理空间数据坐标体系掌握
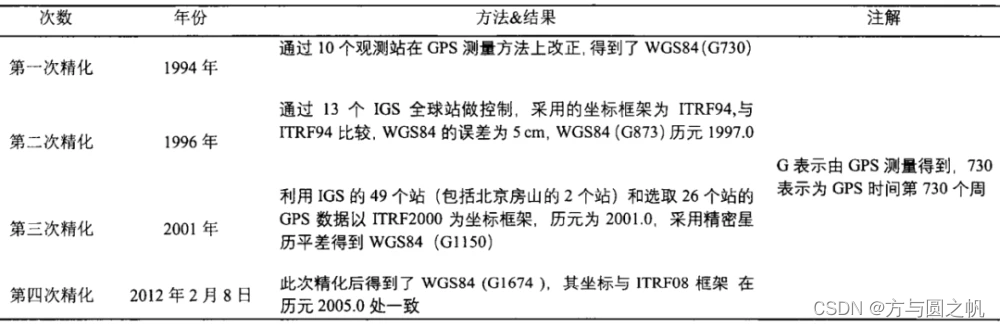
参考资源链接:[GeoDa使用手册(中文版)](https://wenku.csdn.net/doc/6412b654be7fbd1778d4655b?spm=1055.2635.3001.10343)
# 1. 坐标系转换的基础理论
在地理信息系统(GIS)应用中,坐标系转换是一个至关重要且广泛存在的技术需求。本章将为读者提供坐标系转换的基本概念、数学模型和分类方法,作为深入理解GeoDa等GIS
APT与PPA管理:Ubuntu 14.04软件控制的艺术
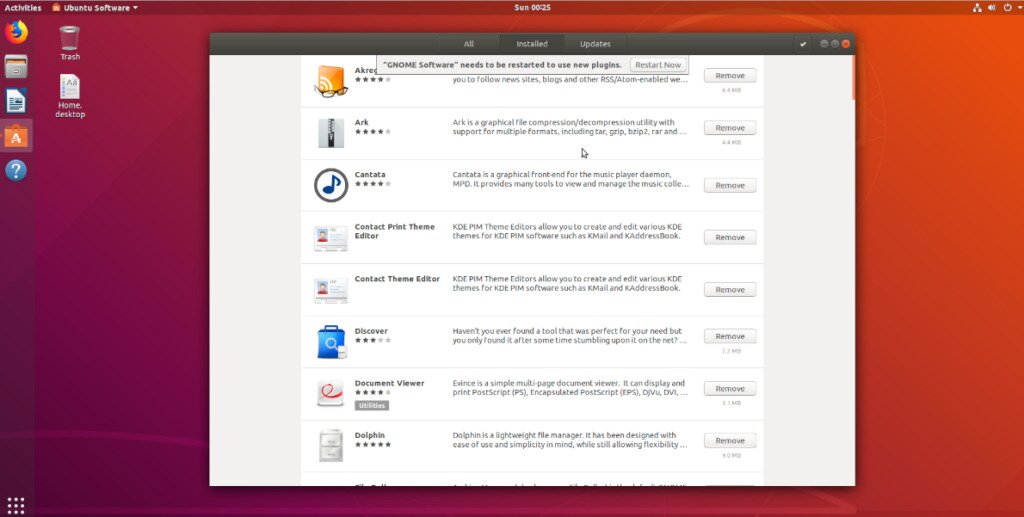
参考资源链接:[ubuntu-14.04-desktop-amd64.iso(网盘链接,永久有效)](https://wenku.csdn.net/doc/6412b76ebe7fbd1778d4a452?spm=1055.2635.3001.10343)
# 1. APT与PPA在Ubuntu中的角色与重要性
## 1.1 Ubuntu软件管理概述
Ubunt
EIDORS文档样式定制:个性化外观的终极指南

参考资源链接:[EIDORS教程:电阻抗层析成像步骤解析](https://wenku.csdn.net/doc/62x8x7s0q8?spm=1055.2635.3001.10343)
# 1. EIDORS文档样式定制概述
在信息技术不断进步的今天,文档的样式定制已经成为提升用户体验和品牌价值的重要手段。EIDORS文档样式
【深度学习模型部署】:深入模型转换的实践技术

参考资源链接:[MARS使用教程:代码与数据导出](https://wenku.csdn.net/doc/5vsdzkdy26?spm=1055.2635.3001.10343)
# 1. 深度学习模型部署
【数据质量控制】:云总线平台确保数据准确性的实践方法
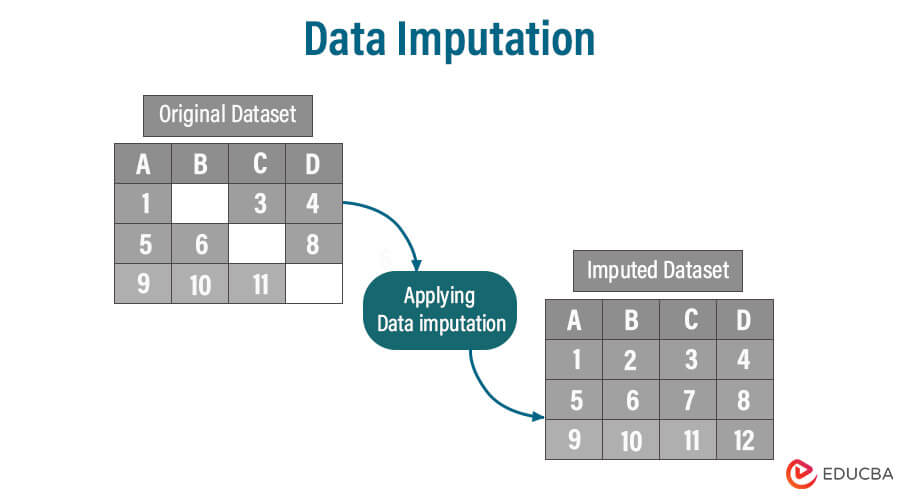
参考资源链接:[阿里云服务总线CSB操作手册](https://wenku.csdn.net/doc/7gabnevyke?spm=1055.2635.3001.10343)
# 1. 数据质量控制在云总线平台的重要性
在当今大数据时代,数据已成为企业和组织最为重要的资产之一。随着企业上云和数字化转型的不断推进,数据质量控制在云总线平台中的作用愈发重要。数据质量直接影响到决策
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )