ROS中的无人车与自动驾驶
发布时间: 2024-02-02 22:57:41 阅读量: 76 订阅数: 24 
# 1. 简介
## 1.1 什么是ROS
ROS(Robot Operating System)是一种开源的机器人操作系统,它提供了一系列的软件框架和工具,用于构建机器人应用程序。ROS采用分布式架构,支持模块化开发,方便开发者快速构建各种类型的机器人系统。
## 1.2 无人车的概念
无人车(Autonomous Vehicle),又称自动驾驶汽车,是指能够在无人驾驶的情况下,自主完成车辆控制和行驶任务的车辆。无人车通过感知、决策和执行等模块的协同工作,能够实现自主导航、避障、目标跟踪等功能。
## 1.3 自动驾驶技术的发展
自动驾驶技术是当今汽车行业研究的热点之一,随着人工智能、计算机视觉和传感器技术的不断发展,自动驾驶技术取得了长足的进步。自动驾驶技术的发展不仅将给交通运输带来巨大的变革,还将提升交通安全性、减少拥堵,使出行更加便利和舒适。
在这个背景下,ROS作为一个强大的机器人操作系统,为无人车的研发和应用提供了丰富的工具和库,成为无人车领域的重要技术基础。接下来的章节中,将详细介绍ROS在无人车与自动驾驶领域的应用、无人车模块、自动驾驶算法、无人车仿真以及挑战与前景等方面的内容。
# 2. ROS与无人车
ROS(Robot Operating System)是一个灵活、可扩展的机器人软件开发框架,已经成为无人车领域中最受欢迎的软件平台之一。结合自动驾驶技术,ROS为无人车的开发和研究提供了强大的工具和支持。
#### 2.1 ROS在无人车领域的应用
ROS为无人车提供了丰富的传感器驱动和数据处理功能,包括激光雷达、摄像头、GPS等,同时也提供了路径规划、避障、定位等关键功能的库和工具。无人车开发者可以通过ROS快速地构建、测试和部署他们的系统。
#### 2.2 ROS的优势与特点
在无人车领域,ROS具有模块化、开放源代码、强大的社区支持等特点。这使得开发者能够从开源社区中受益,共享代码和经验,加速无人车技术的发展。
#### 2.3 ROS与无人车技术的结合
ROS为无人车带来了高效的开发框架和丰富的功能模块,同时也为无人车技术的研究和应用提供了强大的支持。通过ROS,无人车开发者可以更专注于算法的研发和实车测试,极大地加速了自动驾驶技术的进步。
# 3. ROS中的无人车模块
在ROS中,无人车的功能被模块化分为感知模块、控制模块、导航模块和规划模块。每个模块负责不同的任务,通过ROS的消息传递机制进行信息交流和协调工作。下面将详细介绍每个模块的功能和实现方式。
#### 3.1 感知模块
感知模块负责无人车对周围环境的感知与理解,一般包括摄像头、激光雷达、雷达等传感器的数据获取与处理。常见的感知任务包括目标检测与识别、障碍物检测与跟踪、环境地图构建等。
在ROS中,常用的感知库包括OpenCV、PCL(点云库)、Apriltags等。通过使用这些库,可以方便地实现车辆对周围环境的感知与认知。
下面是一个简单的使用OpenCV进行目标检测的代码示例:
```python
# 导入所需的库
import cv2
# 加载分类器
face_cascade = cv2.CascadeClassifier('haarcascade_frontalface_default.xml')
# 读取图像
img = cv2.imread('image.jpg')
# 图像灰度化
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 使用分类器进行目标检测
faces = face_cascade.detectMultiScale(gray, 1.3, 5)
# 绘制检测结果
for (x, y, w, h) in faces:
cv2.rectangle(img, (x, y), (x+w, y+h), (255, 0, 0), 2)
# 显示检测结果
cv2.imshow('img', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
通过以上代码,我们可以使用OpenCV进行图像的人脸检测,将检测结果在图像上进行绘制并显示出来。
#### 3.2 控制模块
控制模块负责无人车的动作控制和执行,通过接收来自其他模块的信息,控制车辆进行动作。常见的控制任务包括速度控制、方向控制、姿态控制等。
在ROS中,可以通过使用相应的控制器节点来实现车辆的控制。例如,可以使用`twist_mux`节点来合并多个速度指令,然后将合并后的指令发送给底层控制器。
下面是一个简单的使用`twist_mux`合并速度指令的例子:
```python
# 导入所需的库
import rospy
from geometry_msgs.msg import Twist
# 初始化ROS节点
rospy.init_node('control_node', anonymous=True)
# 创建速度指令发布者
vel_pub = rospy.Publisher('/cmd_vel', Twist, queue_size=10)
# 创建速度指令消息
velocity = Twist()
velocity.linear.x = 0.5
velocity.angular.z = 0.1
# 发布速度指令
vel_pub.publish(velocity)
# 等待1秒后停止
rospy.sleep(1)
# 停止车辆
velocity.linear.x = 0
velocity.angular.z = 0
vel_pub.publish(velocity)
```
通过以上代码,我们可以创建一个ROS节点,发布速度指令给`/cmd_vel`话题,来控制车辆的运动。
#### 3.3 导航模块
导航模块负责实现车辆的路径规划和导航功能,使车辆能够在复杂的环境中自主导航。常见的导航任务包括地图构建、定位、路径规划与跟踪等。
在ROS中,可以使用导航堆栈(Navigation Stack)来实现车辆的导航功能。导航堆栈由一

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《ROS机器人开发基础与应用》是一本全面深入介绍ROS(机器人操作系统)的专栏。该专栏涉及了ROS的各个方面,从ROS的简介及安装配置、消息通信、时间同步、运动控制、感知与环境建模、导航与路径规划、SLAM技术、语音处理与语音识别、机器学习与深度学习、无人机与飞行控制、无人车与自动驾驶,以及人机交互与人工智能等领域。读者将能够掌握ROS的基础知识和开发技能,了解ROS在不同应用领域的实际应用。无论是学习ROS的初学者还是已有一定经验的开发者,都能从该专栏中获得实用的知识和技术,进一步提升在ROS机器人开发领域的能力。本专栏将帮助读者进一步了解ROS机器人操作系统,并在实践中应用它们,从而增强对机器人的开发和应用的理解和掌握。
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
预测模型中的填充策略对比
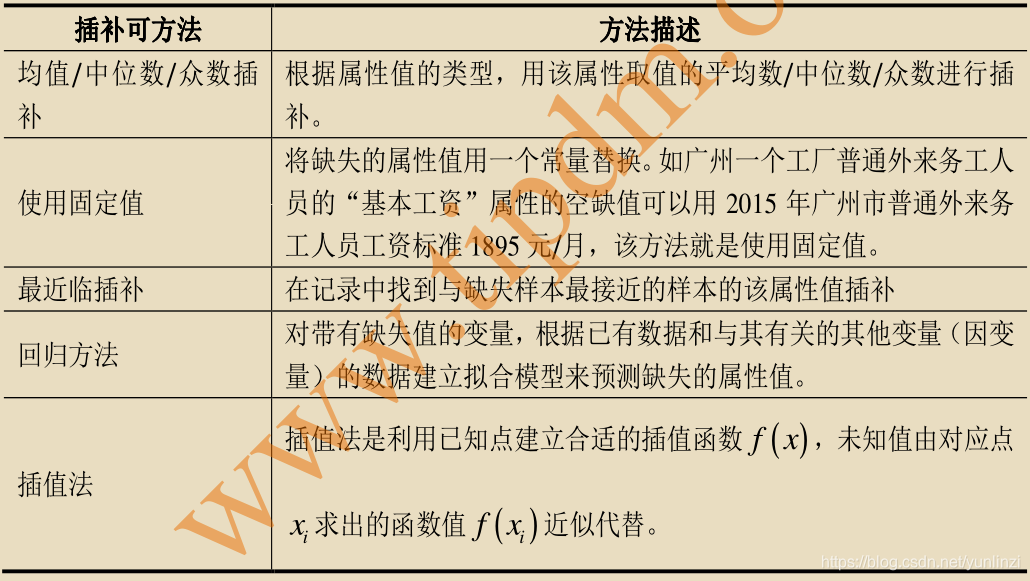
# 1. 预测模型填充策略概述
## 简介
在数据分析和时间序列预测中,缺失数据是一个常见问题,这可能是由于各种原因造成的,例如技术故障、数据收集过程中的疏漏或隐私保护等原因。这些缺失值如果
决策树在金融风险评估中的高效应用:机器学习的未来趋势
# 1. 决策树算法概述与金融风险评估
## 决策树算法概述
决策树是一种被广泛应用于分类和回归任务的预测模型。它通过一系列规则对数据进行分割,以达到最终的预测目标。算法结构上类似流程图,从根节点开始,通过每个内部节点的测试,分支到不
【案例分析】:金融领域中类别变量编码的挑战与解决方案

# 1. 类别变量编码基础
在数据科学和机器学习领域,类别变量编码是将非数值型数据转换为数值型数据的过程,这一步骤对于后续的数据分析和模型建立至关重要。类别变量编码使得模型能够理解和处理原本仅以文字或标签形式存在的数据。
## 1.1 编码的重要性
类别变量编码是数据分析中的基础步骤之一。它能够将诸如性别、城市、颜色等类别信息转换为模型能够识别和处理的数值形式。例如,性别中的“男”和“女
梯度下降在线性回归中的应用:优化算法详解与实践指南
# 1. 线性回归基础概念和数学原理
## 1.1 线性回归的定义和应用场景
线性回归是统计学中研究变量之间关系的常用方法。它假设两个或多个变
市场营销的未来:随机森林助力客户细分与需求精准预测

# 1. 市场营销的演变与未来趋势
市场营销作为推动产品和服务销售的关键驱动力,其演变历程与技术进步紧密相连。从早期的单向传播,到互联网时代的双向互动,再到如今的个性化和智能化营销,市场营销的每一次革新都伴随着工具、平台和算法的进化。
## 1.1 市场营销的历史沿
数据增强实战:从理论到实践的10大案例分析

# 1. 数据增强简介与核心概念
数据增强(Data Augmentation)是机器学习和深度学习领域中,提升模型泛化能力、减少过拟合现象的一种常用技术。它通过创建数据的变形、变化或者合成版本来增加训练数据集的多样性和数量。数据增强不仅提高了模型对新样本的适应能力,还能让模型学习到更加稳定和鲁棒的特征表示。
## 数据增强的核心概念
数据增强的过程本质上是对已有数据进行某种形式的转换,而不改变其底层的分
SVM与其他算法的对比分析:选择SVM的正确时机
# 1. 支持向量机(SVM)基础理论
## 1.1 SVM的定义与核心思想
支持向量机(Support Vector Machines, SVM)是一种常用的监督学习算法,主要用于分类和回归任务。其核心思想是通过找到最优超平面,实现分类的边界最大化。在高维空间中,超平面是一个分隔不同类别的线或者面,使得各类别之间间隔尽可能大,增强模型的泛化能力。
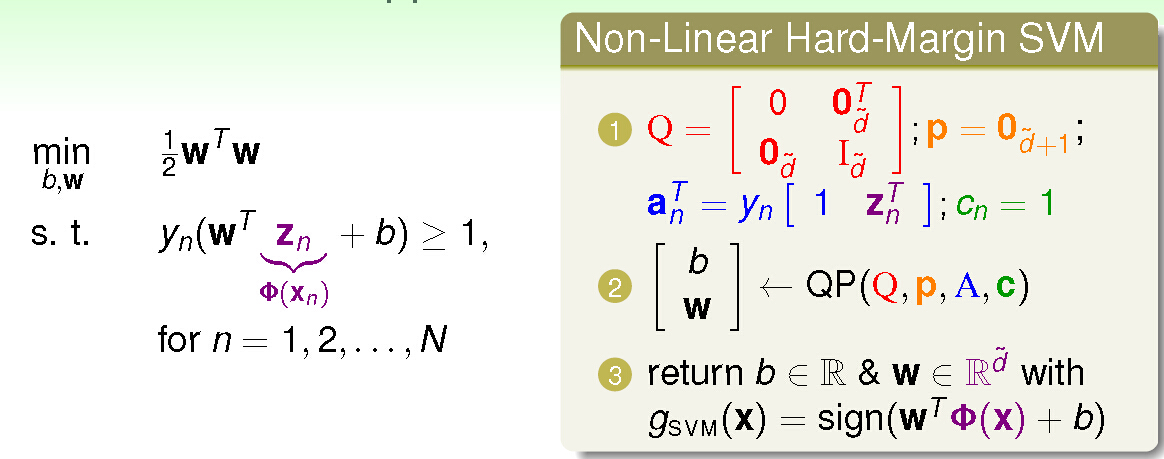
## 1.2 SVM的数学模型
数学上,SVM模型的求解可以转化为一个二次规划问题。对于一个二分类
自然语言处理新视界:逻辑回归在文本分类中的应用实战
# 1. 逻辑回归与文本分类基础
## 1.1 逻辑回归简介
逻辑回归是一种广泛应用于分类问题的统计模型,它在二分类问题中表现尤为突出。尽管名为回归,但逻辑回归实际上是一种分类算法,尤其适合处理涉及概率预测的场景。
## 1.2 文本分类的挑战
文本分类涉及将文本数据分配到一个或多个类别中。这个过程通常包括预处理步骤,如分词、去除停用词,以及特征提取,如使用词袋模型或TF-IDF方法
【聚类算法优化】:特征缩放的深度影响解析
# 1. 聚类算法的理论基础
聚类算法是数据分析和机器学习中的一种基础技术,它通过将数据点分配到多个簇中,以便相同簇内的数据点相似度高,而不同簇之间的数据点相似度低。聚类是无监督学习的一个典型例子,因为在聚类任务中,数据点没有预先标注的类别标签。聚类算法的种类繁多,包括K-means、层次聚类、DBSCAN、谱聚类等。
聚类算法的性能很大程度上取决于数据的特征。特征即是数据的属性或
【超参数调优与数据集划分】:深入探讨两者的关联性及优化方法
# 1. 超参数调优与数据集划分概述
在机器学习和数据科学的项目中,超参数调优和数据集划分是两个至关重要的步骤,它们直接影响模型的性能和可靠性。本章将为您概述这两个概念,为后续深入讨论打下基础。
## 1.1 超参数与模型性能
超参数是机器学习模型训练之前设置的参数,它们控制学习过程并影响最终模型的结构。选择合适的超参数对于模型能否准确捕捉到数据中的模式至关重要。一个不
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )