ROS中的SLAM算法及应用
发布时间: 2024-01-15 07:18:40 阅读量: 232 订阅数: 32 
# 1. 简介
## 1.1 ROS(Robot Operating System)简介
ROS(Robot Operating System)是一个开源的机器人操作系统,提供了一套基础的工具和库,用于构建机器人相关的软件系统。它是一个分布式的架构,具有强大的跨平台性和可扩展性,广泛应用于机器人开发领域。
ROS提供了一系列用于通信、设备驱动、系统控制等功能的包,支持多种编程语言(如C++、Python等),使得开发者可以方便地构建机器人应用程序。同时,ROS还提供了丰富的工具和算法库,用于机器人的感知、运动控制、导航等任务。
## 1.2 SLAM(Simultaneous Localization and Mapping)概述
SLAM(Simultaneous Localization and Mapping)即同时定位与地图构建,是机器人领域中的一个关键技术。它通过机器人在未知环境中移动,利用传感器数据实时感知周围环境,同时估计机器人的位置并构建环境地图。SLAM技术在机器人自主导航、智能交通、虚拟现实等领域具有广泛的应用前景。
SLAM技术的核心问题是通过融合来自不同传感器的数据,如激光雷达、摄像头、惯性测量单元(IMU)等,实现机器人的自主定位和建图。传统的SLAM算法包括基于滤波器的方法(如扩展卡尔曼滤波器)和基于优化的方法(如图优化算法)。
## 1.3 ROS与SLAM的结合意义
ROS作为一个开源的机器人操作系统,为SLAM算法的实现提供了丰富的工具和库。ROS中集成了多个开源的SLAM算法库,如GMapping、Hector SLAM、Cartographer等,开发者可以直接使用这些算法库进行机器人的定位和建图任务。
通过将ROS与SLAM相结合,开发者可以快速搭建起一个完整的机器人系统,实现自主定位和环境建模的功能。同时,ROS还提供了可视化工具和调试接口,方便开发者对SLAM算法进行调试和优化。
总之,ROS与SLAM的结合为机器人开发者提供了一个强大的开发平台,使他们能够更快速、高效地实现机器人的自主定位和环境建模。下面,我们将详细介绍ROS中的SLAM算法以及它们的应用。
# 2. SLAM算法
SLAM(Simultaneous Localization and Mapping)是一种同时实现机器人定位和环境地图构建的技术。在ROS中,SLAM算法是实现移动机器人自主定位和建图的重要组成部分。本章将介绍SLAM算法的基本原理、常见的算法以及在ROS中的实现方式。
### 2.1 基本原理
SLAM算法的基本原理是通过机器人在未知环境中的移动和观测信息,利用概率模型和优化方法估计机器人的位姿和环境的地图。具体而言,SLAM算法包括以下几个关键步骤:
1. 数据获取:通过传感器(如激光雷达、摄像头等)获取机器人在环境中的观测数据。
2. 特征提取:从观测数据中提取有用的特征信息,如地面点、墙面、障碍物等。
3. 数据关联:通过将当前观测数据与之前观测数据进行匹配,确定机器人的位姿。
4. 运动估计:通过比较机器人在两个时间步长的位姿变化,估计机器人的运动模型。
5. 地图构建:将观测到的特征信息与机器人位姿相对应,构建环境的地图模型。
6. 位姿优化:使用优化方法,对机器人的位姿进行调整,提高精度。
### 2.2 常见的SLAM算法
在SLAM算法中,有多种不同的方法和技术可以应用于不同的场景和要求。以下是一些常见的SLAM算法:
- EKF-SLAM(Extended Kalman Filter SLAM):使用扩展卡尔曼滤波器进行位姿估计和地图构建。
- FastSLAM:基于粒子滤波的SLAM算法,可以处理非线性和非高斯分布的动态环境。
- GraphSLAM:将SLAM问题建模为图优化问题,并使用图优化算法求解机器人位姿和地图。
- LSD-SLAM(Large-Scale Direct SLAM):通过直接法在视觉SLAM中进行特征提取和位姿估计,适用于大规模场景。
- ORB-SLAM:结合ORB特征和单目相机的SLAM算法,适用于实时性要求较高的环境。
### 2.3 SLAM算法在ROS中的实现方式
在ROS中,通过使用各种SLAM库和工具包,可以方便地实现SLAM算法。以下是常用的SLAM算法在ROS中的实现方式:
- GMapping:基于概率栅格地图的SLAM算法,可以通过激光雷达数据进行地图构建和定位。
```python
# 示例代码
import rospy
from sensor_msgs.msg import LaserScan
from nav_msgs.msg import OccupancyGrid
from gmapping import GMapping
def scan_callback(scan):
# 处理激光雷达数据
...
def mapping_callback(map):
# 处理地图数据
...
if __name__ == "__main__":
rospy.init_node("gmapping_node")
gmapping = GMapping()
rospy.Subscriber("scan", LaserScan, scan_callback)
rospy.Subscriber("map", OccupancyGrid, mapping_callback)
rospy.spin()
```
- Hector SLAM:基于激光雷达和惯性测量单元(IMU)的SLAM算法,实现了2D和3D建图的功能。
```python
# 示例代码
import rospy
from sensor_msgs.msg import LaserScan, Imu
from hector_slam import HectorSLAM
def scan_callback(scan):
# 处理激光雷达数据
...
def imu_callback(imu):
# 处理IMU数据
...
if __name__ == "__main__":
rospy.init_node("hector_slam_node")
hector_slam = HectorSLAM()
rospy.Subscriber("scan", LaserScan, scan_callback)
rospy.Subscriber("imu", Imu, imu_callback)
hector_slam.start()
rospy.spin()
```
- Cartographer:Google开发的通用2D和3D SLAM算法,可以在多种传感器(如激光雷达、摄像头、IMU等)上进行建图和定位。
```python
# 示例代码
import rospy
from sensor_msgs.msg import LaserScan, Imu, CameraInfo
from cartographer import Cartographer
def scan_callback(scan):
# 处理激光雷达数据
...
def imu_callback(imu):
# 处理IMU数据
...
def camera_callback(camera_info):
# 处理相机数据
...
if __name__ == "__main__":
rospy.init_node("cartographer_node")
cartographer = Cartographer()
rospy.Subscriber("scan", LaserScan, scan_callback)
rospy.Subscriber("imu", Imu, imu_callback)
rospy.Subscriber("camera_info", CameraInfo, camera_callback)
cartographer.start()
rospy.spin()
```
以上是SLAM算法在ROS中的一些实现方式,可以根据具体需求选择适合的算法和库进行开发和应用。SLAM算法的实际应用非常广泛,下一章节将介绍SLAM算法在ROS中的一些具体应用案例。
# 3. ROS中的SLAM库
在ROS中,有许多开源的SLAM库可供使用,下面将介绍其中几个常用的SLAM库及其应用。
#### 3.1 GMapping
GMapping是一种基于激光传感器数据的增量式SLAM算法。它通过利用粒子滤波器来估计机器人在环境中的位置和地图的构建。GMapping算法在ROS中以`gmapping`包的形式提供,可以与ROS中的激光雷达数据进行集成。
以下是一个使用GMapping进行SLAM的示例代码:
```python
import rospy
from sensor_msgs.msg import Laser
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏旨在为读者提供全面、系统的ROS(机器人操作系统)相关知识,从入门到精通,涵盖了ROS机器人的各个方面。首先,我们将介绍ROS机器人的入门指南,帮助读者快速上手。接着,我们详细讲解ROS机器人的安装与配置,让读者轻松搭建开发环境。然后,我们会介绍ROS机器人的基础概念和术语,让读者对ROS的核心概念有更深入的理解。接下来,我们会深入探讨ROS中发布与订阅消息的原理与实现,以及服务与动作的使用方法。我们还将讲解ROS中多机器人通信与协作的实现,以及构建与运行包的方法。此外,我们还将介绍ROS中常用的开发工具和传感器数据处理与使用方法。最后,我们还将深入研究ROS中的导航与路径规划算法,SLAM算法及应用,视觉处理与图像识别,物体检测与跟踪,以及自动驾驶与无人驾驶技术。通过本专栏,读者将全面了解ROS机器人,并掌握相关技术的应用。
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【特征工程稀缺技巧】:标签平滑与标签编码的比较及选择指南
# 1. 特征工程简介
## 1.1 特征工程的基本概念
特征工程是机器学习中一个核心的步骤,它涉及从原始数据中选取、构造或转换出有助于模型学习的特征。优秀的特征工程能够显著提升模型性能,降低过拟合风险,并有助于在有限的数据集上提炼出有意义的信号。
## 1.2 特征工程的重要性
在数据驱动的机器学习项目中,特征工程的重要性仅次于数据收集。数据预处理、特征选择、特征转换等环节都直接影响模型训练的效率和效果。特征工程通过提高特征与目标变量的关联性来提升模型的预测准确性。
## 1.3 特征工程的工作流程
特征工程通常包括以下步骤:
- 数据探索与分析,理解数据的分布和特征间的关系。
- 特
自然语言处理中的独热编码:应用技巧与优化方法
# 1. 自然语言处理与独热编码概述
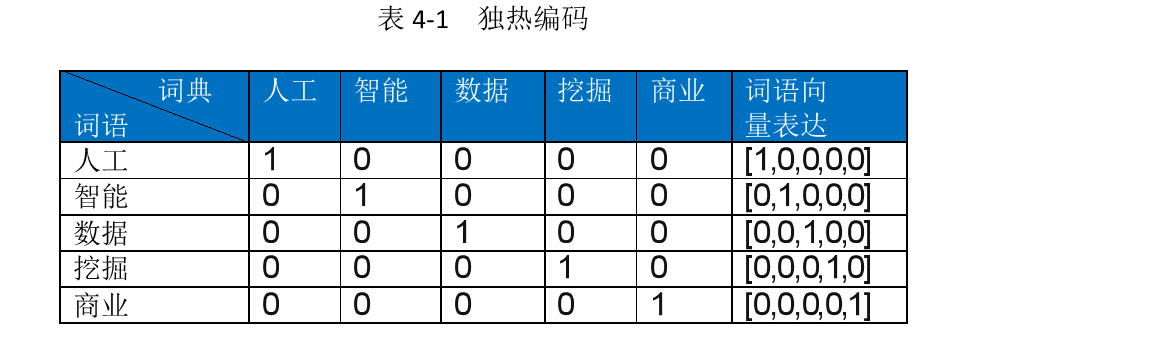
自然语言处理(NLP)是计算机科学与人工智能领域中的一个关键分支,它让计算机能够理解、解释和操作人类语言。为了将自然语言数据有效转换为机器可处理的形式,独热编码(One-Hot Encoding)成为一种广泛应用的技术。
## 1.1 NLP中的数据表示
在NLP中,数据通常是以文本形式出现的。为了将这些文本数据转换为适合机器学习模型的格式,我们需要将单词、短语或句子等元
【统计学意义的验证集】:理解验证集在机器学习模型选择与评估中的重要性
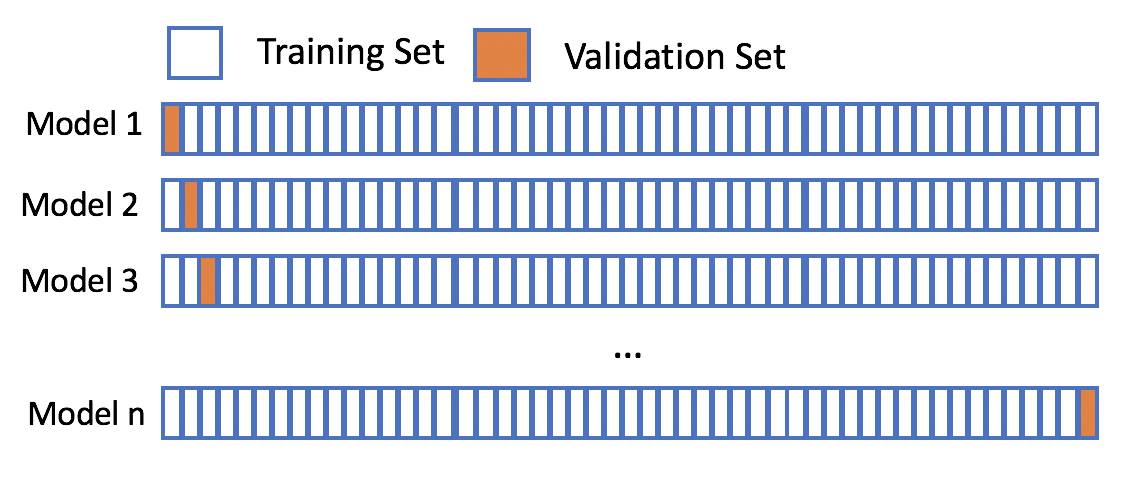
# 1. 验证集的概念与作用
在机器学习和统计学中,验证集是用来评估模型性能和选择超参数的重要工具。**验证集**是在训练集之外的一个独立数据集,通过对这个数据集的预测结果来估计模型在未见数据上的表现,从而避免了过拟合问题。验证集的作用不仅仅在于选择最佳模型,还能帮助我们理解模型在实际应用中的泛化能力,是开发高质量预测模型不可或缺的一部分。
```markdown
## 1.1 验证集与训练集、测试集的区
【PCA算法优化】:减少计算复杂度,提升处理速度的关键技术

# 1. PCA算法简介及原理
## 1.1 PCA算法定义
主成分分析(PCA)是一种数学技术,它使用正交变换来将一组可能相关的变量转换成一组线性不相关的变量,这些新变量被称为主成分。
## 1.2 应用场景概述
PCA广泛应用于图像处理、降维、模式识别和数据压缩等领域。它通过减少数据的维度,帮助去除冗余信息,同时尽可能保
【交互特征的影响】:分类问题中的深入探讨,如何正确应用交互特征
# 1. 交互特征在分类问题中的重要性
在当今的机器学习领域,分类问题一直占据着核心地位。理解并有效利用数据中的交互特征对于提高分类模型的性能至关重要。本章将介绍交互特征在分类问题中的基础重要性,以及为什么它们在现代数据科学中变得越来越不可或缺。
## 1.1 交互特征在模型性能中的作用
交互特征能够捕捉到数据中的非线性关系,这对于模型理解和预测复杂模式至关重要。例如
探索性数据分析:训练集构建中的可视化工具和技巧
# 1. 探索性数据分析简介
在数据分析的世界中,探索性数据分析(Exploratory Dat
过拟合的统计检验:如何量化模型的泛化能力

# 1. 过拟合的概念与影响
## 1.1 过拟合的定义
过拟合(overfitting)是机器学习领域中一个关键问题,当模型对训练数据的拟合程度过高,以至于捕捉到了数据中的噪声和异常值,导致模型泛化能力下降,无法很好地预测新的、未见过的数据。这种情况下的模型性能在训练数据上表现优异,但在新的数据集上却表现不佳。
## 1.2 过拟合产生的原因
过拟合的产生通常与模
失败是成功之母:从欠拟合案例中学到的经验
# 1. 欠拟合的定义和影响
## 1.1 欠拟合的基本概念
在机器学习领域,欠拟合(Underfitting)是一个常见的问题,它发生在模型无法捕捉到数据中
【时间序列分析】:如何在金融数据中提取关键特征以提升预测准确性

# 1. 时间序列分析基础
在数据分析和金融预测中,时间序列分析是一种关键的工具。时间序列是按时间顺序排列的数据点,可以反映出某
测试集在兼容性测试中的应用:确保软件在各种环境下的表现

# 1. 兼容性测试的概念和重要性
## 1.1 兼容性测试概述
兼容性测试确保软件产品能够在不同环境、平台和设备中正常运行。这一过程涉及验证软件在不同操作系统、浏览器、硬件配置和移动设备上的表现。
## 1.2 兼容性测试的重要性
在多样的IT环境中,兼容性测试是提高用户体验的关键。它减少了因环境差异导致的问题,有助于维护软件的稳定性和可靠性,降低后
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )