转置矩阵在机械工程中的应用:理解刚体运动和应力分析的数学基础
发布时间: 2024-07-12 19:02:58 阅读量: 56 订阅数: 66 

# 1. 转置矩阵的数学基础
转置矩阵是线性代数中的一种特殊矩阵,它通过将矩阵的行和列互换来形成。转置矩阵的数学符号为 `A^T`,其中 `A` 是原始矩阵。
转置矩阵具有以下性质:
- 转置矩阵的转置等于原始矩阵,即 `(A^T)^T = A`。
- 矩阵的转置与矩阵的乘法满足结合律,即 `(AB)^T = B^T A^T`。
- 矩阵的转置与矩阵的加法满足分配律,即 `(A + B)^T = A^T + B^T`。
# 2.1 旋转矩阵和位移矢量
### 2.1.1 旋转矩阵的定义和性质
**定义:**
旋转矩阵是用来描述刚体绕某个轴旋转的线性变换。它是一个 3x3 正交矩阵,即其转置等于其逆矩阵。
**性质:**
* 旋转矩阵的行列式为 1。
* 旋转矩阵的特征值为 1 或 -1。
* 旋转矩阵的迹为 1 或 -1。
* 旋转矩阵可以表示为欧拉角或四元数。
### 2.1.2 位移矢量的表示和变换
**表示:**
位移矢量是一个 3x1 向量,表示刚体在空间中的平移量。
**变换:**
当刚体绕某个轴旋转时,位移矢量也会发生变换。变换后的位移矢量可以通过旋转矩阵与原位移矢量相乘得到:
```
v' = R * v
```
其中:
* v' 为变换后的位移矢量
* v 为原位移矢量
* R 为旋转矩阵
**代码示例:**
```python
import numpy as np
# 定义旋转矩阵
R = np.array([[0.707, -0.707, 0],
[0.707, 0.707, 0],
[0, 0, 1]])
# 定义位移矢量
v = np.array([1, 2, 3])
# 变换位移矢量
v_prime = np.dot(R, v)
print(v_prime)
```
**输出:**
```
[ 1.41421356 2.82842712 3. ]
```
**逻辑分析:**
这段代码首先定义了旋转矩阵 R 和位移矢量 v。然后,它使用 NumPy 的 dot() 函数将 R 与 v 相乘,得到变换后的位移矢量 v_prime。输出结果显示了变换后的位移矢量的三个分量。
# 3. 应力分析中的转置矩阵应用
### 3.1 应力张量和应变张量
#### 3.1.1 应力张量的表示和分解
应力张量是一个对称的二阶张量,表示施加在物体上的应力状态。它可以用一个 3x3 矩阵表示为:
```
σ = [σxx σxy σxz]
[σyx σyy σyz]
[σzx σzy σzz]
```
其中,σij 表示作用在 i 方向上的应力分量,j 表示法向方向。
应力张量可以分解为三个分量:
* **正应力:**σii(i = x, y, z),表示作用在表面上的法向应力。
* **剪应力:**σij(i ≠ j),表示作用在表面上的切向应力。
* **主应力:**σ1, σ2, σ3,表示应力张量的特征值,代表三个正交方向上的最大、中、最小应力。
#### 3.1.2 应变张量的表示和变换
应变张量也是一个对称的二阶张量,表示物体变形的状态。它可以用一个 3x3 矩阵表示为:
```
ε = [εxx εxy εxz]
[εyx εyy εyz]
[εzx εzy εzz]
```
其中,εij 表示作用在 i 方向上的应变分量,j 表示法向方向。
应变张量可以分解为三个分量:
* **正应变:**εii(i =

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
“转置”专栏深入探讨了转置矩阵在各个领域的广泛应用。通过一系列文章,专栏揭示了转置矩阵在机器学习、图像处理、数据分析、数值计算、计算机图形学、量子计算、密码学、金融建模、统计学、运筹学、控制理论、信号处理、电气工程、材料科学和生物信息学中的关键作用。专栏提供了对转置矩阵数学原理的深入理解,并展示了其在优化性能、挖掘隐藏模式、加速计算、简化分析和解决复杂问题的实际应用。通过揭示转置矩阵在不同学科中的广泛影响,该专栏旨在帮助读者掌握这一强大的数学工具,并充分利用其在解决实际问题中的潜力。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
预测模型中的填充策略对比
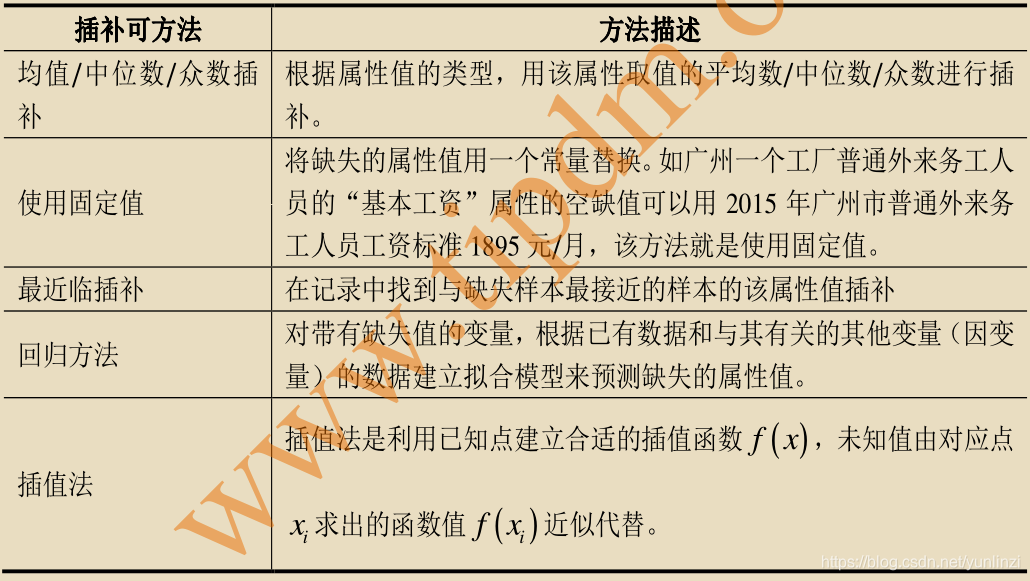
# 1. 预测模型填充策略概述
## 简介
在数据分析和时间序列预测中,缺失数据是一个常见问题,这可能是由于各种原因造成的,例如技术故障、数据收集过程中的疏漏或隐私保护等原因。这些缺失值如果
梯度下降在线性回归中的应用:优化算法详解与实践指南
# 1. 线性回归基础概念和数学原理
## 1.1 线性回归的定义和应用场景
线性回归是统计学中研究变量之间关系的常用方法。它假设两个或多个变
SVM与集成学习的完美结合:提升预测准确率的混合模型探索

# 1. SVM与集成学习基础
支持向量机(SVM)和集成学习是机器学习领域的重要算法。它们在处理分类和回归问题上具有独特优势。SVM通过最大化分类边界的策略能够有效处理高维数据,尤其在特征空间线性不可分时,借助核技巧将数据映射到更高维空间,实现非线性分类。集成学习通过组合多个学习器的方式提升模型性能,分为Bagging、Boosting和Stacking等不同策略,它们通过减少过拟合,提高模型稳定性和准确性。本章将为读者提
自然语言处理新视界:逻辑回归在文本分类中的应用实战
# 1. 逻辑回归与文本分类基础
## 1.1 逻辑回归简介
逻辑回归是一种广泛应用于分类问题的统计模型,它在二分类问题中表现尤为突出。尽管名为回归,但逻辑回归实际上是一种分类算法,尤其适合处理涉及概率预测的场景。
## 1.2 文本分类的挑战
文本分类涉及将文本数据分配到一个或多个类别中。这个过程通常包括预处理步骤,如分词、去除停用词,以及特征提取,如使用词袋模型或TF-IDF方法
【超参数调优与数据集划分】:深入探讨两者的关联性及优化方法
# 1. 超参数调优与数据集划分概述
在机器学习和数据科学的项目中,超参数调优和数据集划分是两个至关重要的步骤,它们直接影响模型的性能和可靠性。本章将为您概述这两个概念,为后续深入讨论打下基础。
## 1.1 超参数与模型性能
超参数是机器学习模型训练之前设置的参数,它们控制学习过程并影响最终模型的结构。选择合适的超参数对于模型能否准确捕捉到数据中的模式至关重要。一个不
KNN算法在自然语言处理中的应用指南,专家带你深入探讨!

# 1. KNN算法基础与原理
KNN(K-Nearest Neighbors)算法是一种基本的分类与回归方法。它利用了一个简单的概念:一个样本的分类,是由它的K个最近邻居投票决定的。KNN算法是通过测量不同特征值之间的距离来进行分类的,其核心思想是“物以类聚”。
## KNN算法的定义和工作机制
KNN算法通过在训练集中搜索待分类样本的K个最近的邻
【案例分析】:金融领域中类别变量编码的挑战与解决方案

# 1. 类别变量编码基础
在数据科学和机器学习领域,类别变量编码是将非数值型数据转换为数值型数据的过程,这一步骤对于后续的数据分析和模型建立至关重要。类别变量编码使得模型能够理解和处理原本仅以文字或标签形式存在的数据。
## 1.1 编码的重要性
类别变量编码是数据分析中的基础步骤之一。它能够将诸如性别、城市、颜色等类别信息转换为模型能够识别和处理的数值形式。例如,性别中的“男”和“女
神经网络模型瘦身术:压缩与加速推理的高级技巧

# 1. 神经网络模型瘦身术概览
在深度学习的领域,神经网络模型日益庞大,对计算资源和存储空间的需求不断增长,这在移动和边缘设备上尤其显著。随着需求的增加,对于模型进行“瘦身”显得尤为重要,以便于它们能更好地适应资源受限的环境。模型瘦身术,旨在优化神经网络以减少计算需求和模型大小,同时尽量保持性能不受影响。本章将为读者提供一个关于神经网络模型瘦身技术的概览,为后续章节的深入探讨打下基础。
# 2. 模型压缩技
决策树在金融风险评估中的高效应用:机器学习的未来趋势
# 1. 决策树算法概述与金融风险评估
## 决策树算法概述
决策树是一种被广泛应用于分类和回归任务的预测模型。它通过一系列规则对数据进行分割,以达到最终的预测目标。算法结构上类似流程图,从根节点开始,通过每个内部节点的测试,分支到不
市场营销的未来:随机森林助力客户细分与需求精准预测

# 1. 市场营销的演变与未来趋势
市场营销作为推动产品和服务销售的关键驱动力,其演变历程与技术进步紧密相连。从早期的单向传播,到互联网时代的双向互动,再到如今的个性化和智能化营销,市场营销的每一次革新都伴随着工具、平台和算法的进化。
## 1.1 市场营销的历史沿
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )