MATLAB三维数组与计算机视觉:赋予计算机“视觉”,解锁人工智能新应用
发布时间: 2024-06-08 03:15:14 阅读量: 77 订阅数: 39 

MATLAB三维数组详解与应用
# 1. MATLAB三维数组基础**
MATLAB三维数组是一种数据结构,用于存储三维数据,例如图像、体积和点云。与一维和二维数组类似,三维数组使用索引来访问其元素,但它具有额外的维度,允许表示三维空间。
创建三维数组时,可以使用`zeros()`、`ones()`或`rand()`函数,并指定数组的三个维度。例如,以下代码创建一个大小为10x10x10的三维数组,其中元素值均为0:
```matlab
A = zeros(10, 10, 10);
```
访问三维数组中的元素时,可以使用三个索引,分别对应于数组的三个维度。例如,以下代码访问数组`A`中(5, 5, 5)位置的元素:
```matlab
element_value = A(5, 5, 5);
```
# 2. 三维数组在计算机视觉中的应用
三维数组在计算机视觉中扮演着至关重要的角色,为计算机提供了“视觉”能力,使其能够感知和理解图像和视频中的信息。在这一章节中,我们将深入探讨三维数组在计算机视觉中的广泛应用,包括图像处理、特征提取、三维重建和建模。
### 2.1 图像处理和增强
三维数组在图像处理和增强中有着广泛的应用。
#### 2.1.1 图像平滑和锐化
图像平滑和锐化是图像处理中常用的技术,用于去除噪声并增强图像细节。三维数组可以有效地表示图像的像素值,从而方便地进行平滑和锐化操作。
**代码块:**
```matlab
% 创建一个三维数组表示图像
image_array = imread('image.jpg');
% 高斯平滑
smoothed_image = imgaussfilt(image_array, 2);
% 拉普拉斯锐化
sharpened_image = imsharpen(image_array, 'Amount', 1);
```
**逻辑分析:**
* `imread` 函数读取图像并将其存储在三维数组 `image_array` 中。
* `imgaussfilt` 函数使用高斯滤波器对图像进行平滑,`2` 表示滤波器核的大小。
* `imsharpen` 函数使用拉普拉斯算子对图像进行锐化,`Amount` 参数控制锐化程度。
#### 2.1.2 图像变换和拼接
三维数组还可以用于执行图像变换和拼接操作。
**代码块:**
```matlab
% 旋转图像
rotated_image = imrotate(image_array, 45);
% 拼接图像
stitched_image = stitch(image_array1, image_array2);
```
**逻辑分析:**
* `imrotate` 函数将图像旋转 45 度,并将其存储在 `rotated_image` 中。
* `stitch` 函数将两个三维数组 `image_array1` 和 `image_array2` 拼接在一起,形成一个新的三维数组 `stitched_image`。
### 2.2 特征提取和匹配
特征提取和匹配是计算机视觉中至关重要的任务,用于识别和分类图像中的对象。
#### 2.2.1 局部特征描述符
局部特征描述符用于提取图像中特定区域的特征,这些区域对图像的识别具有鲁棒性。三维数组可以有效地表示这些局部特征。
**代码块:**
```matlab
% 使用 SIFT 算法提取局部特征
sift_features = vl_sift(image_array);
```
**逻辑分析:**
* `vl_sift` 函数使用尺度不变特征变换 (SIFT) 算法提取图像中的局部特征,并将其存储在 `sift_features` 中。
#### 2.2.2 特征匹配和识别
特征匹配和识别是将提取的特征与已知对象或场景进行匹配的过程。三维数组可以方便地存储和比较这些特征。
**代码块:**
```matlab
% 匹配特征
matches = matchFeatures(sift_features1, sift_features2);
% 识别对象
object_class = classifyObject(matches);
```
**逻辑分析:**
* `matchFeatures` 函数将 `sift_features1` 和 `sift_features2` 中的特征进行匹配,并返回一个匹配列表 `matches`。
* `classifyObject` 函数使用匹配列表 `matches` 识别图像中的对象,并返回其类别 `object_class`。
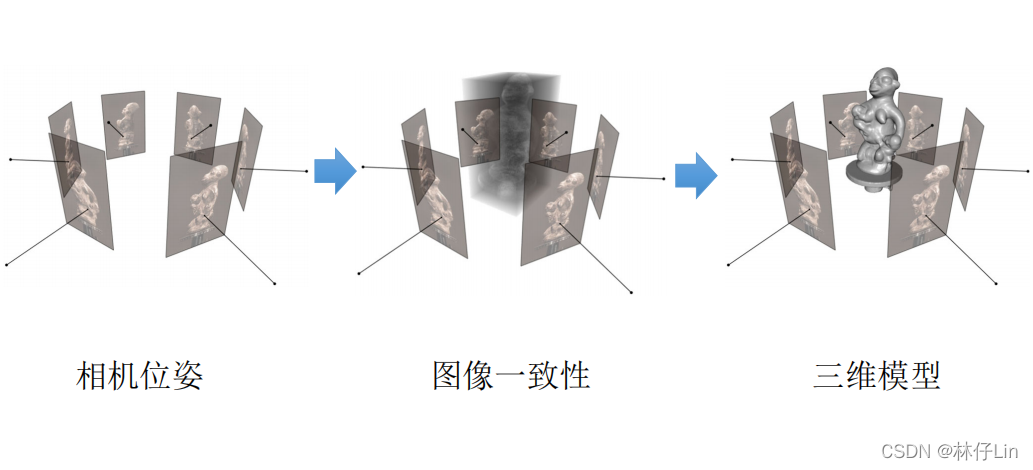
### 2.3 三维重建和建模
三维重建和建模是将图像或视频序列转换为三维模型的过程。三维数组在这一过程中起着至关重要的作用,因为它可以表示三维空间中的点和表面。
#### 2.3.1 点云处理和重建
点云是三维空间中点的集合,三维数组可以有效地存储和

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
MATLAB 三维数组专栏深入探讨了三维数组在 MATLAB 中的强大功能。从数组操作的更高维度到数据处理的优化,再到图像处理、机器学习、数据分析、科学计算、工程模拟、医学成像、地球科学、遥感、计算机视觉、机器人技术、自动驾驶、无人机技术、虚拟现实和增强现实等领域的应用,专栏提供了全面的指南。通过深入理解数组结构和操作,读者可以解锁数据处理的新境界,提升模型性能,发现隐藏的趋势,解决复杂问题,构建逼真的模型,探索人体的新维度,揭示地球奥秘,提取卫星图像信息,赋予计算机“视觉”,控制和导航智能机器人,解锁自动驾驶潜力,探索空中新领域,创造身临其境的体验,并将数字世界与现实世界融合。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【电子打印小票的前端实现】:用Electron和Vue实现无缝打印

# 摘要
电子打印小票作为商业交易中不可或缺的一部分,其需求分析和实现对于提升用户体验和商业效率具有重要意义。本文首先介绍了电子打印小票的概念,接着深入探讨了Electron和Vue.js两种前端技术的基础知识及其优势,阐述了如何将这两者结合,以实现高效、响应
【EPLAN Fluid精通秘籍】:基础到高级技巧全覆盖,助你成为行业专家
# 摘要
EPLAN Fluid是针对工程设计的专业软件,旨在提高管道和仪表图(P&ID)的设计效率与质量。本文首先介绍了EPLAN Fluid的基本概念、安装流程以及用户界面的熟悉方法。随后,详细阐述了软件的基本操作,包括绘图工具的使用、项目结构管理以及自动化功能的应用。进一步地,本文通过实例分析,探讨了在复杂项目中如何进行规划实施、设计技巧的运用和数据的高效管理。此外,文章还涉及了高级优化技巧,包括性能调优和高级项目管理策略。最后,本文展望了EPLAN Fluid的未来版本特性及在智能制造中的应用趋势,为工业设计人员提供了全面的技术指南和未来发展方向。
# 关键字
EPLAN Fluid
小红书企业号认证优势大公开:为何认证是品牌成功的关键一步
# 摘要
小红书企业号认证是品牌在小红书平台上的官方标识,代表了企业的权威性和可信度。本文概述了小红书企业号的市场地位和用户画像,分析了企业号与个人账号的区别及其市场意义,并详细解读了认证过程与要求。文章进一步探讨了企业号认证带来的优势,包括提升品牌权威性、拓展功能权限以及商业合作的机会。接着,文章提出了企业号认证后的运营策略,如内容营销、用户互动和数据分析优化。通过对成功认证案例的研究,评估
【用例图与图书馆管理系统的用户交互】:打造直观界面的关键策略

# 摘要
本文旨在探讨用例图在图书馆管理系统设计中的应用,从基础理论到实际应用进行了全面分析。第一章概述了用例图与图书馆管理系统的相关性。第二章详细介绍了用例图的理论基础、绘制方法及优化过程,强调了其在系统分析和设计中的作用。第三章则集中于用户交互设计原则和实现,包括用户界面布局、交互流程设计以及反馈机制。第四章具体阐述了用例图在功能模块划分、用户体验设计以及系统测试中的应用。
FANUC面板按键深度解析:揭秘操作效率提升的关键操作
# 摘要
FANUC面板按键作为工业控制中常见的输入设备,其功能的概述与设计原理对于提高操作效率、确保系统可靠性及用户体验至关重要。本文系统地介绍了FANUC面板按键的设计原理,包括按键布局的人机工程学应用、触觉反馈机制以及电气与机械结构设计。同时,本文也探讨了按键操作技巧、自定义功能设置以及错误处理和维护策略。在应用层面,文章分析了面板按键在教育培训、自动化集成和特殊行业中的优化策略。最后,本文展望了按键未来发展趋势,如人工智能、机器学习、可穿戴技术及远程操作的整合,以及通过案例研究和实战演练来提升实际操作效率和性能调优。
# 关键字
FANUC面板按键;人机工程学;触觉反馈;电气机械结构
华为SUN2000-(33KTL, 40KTL) MODBUS接口安全性分析与防护

# 摘要
本文深入探讨了MODBUS协议在现代工业通信中的基础及应用背景,重点关注SUN2000-(33KTL, 40KTL)设备的MODBUS接口及其安全性。文章首先介绍了MODBUS协议的基础知识和安全性理论,包括安全机制、常见安全威胁、攻击类型、加密技术和认证方法。接着,文章转入实践,分析了部署在SUN2
【高速数据传输】:PRBS的优势与5个应对策略

# 摘要
本文旨在探讨高速数据传输的背景、理论基础、常见问题及其实践策略。首先介绍了高速数据传输的基本概念和背景,然后详细分析了伪随机二进制序列(PRBS)的理论基础及其在数据传输中的优势。文中还探讨了在高速数据传输过程中可能遇到的问题,例如信号衰减、干扰、传输延迟、带宽限制和同步问题,并提供了相应的解决方案。接着,文章提出了一系列实际应用策略,包括PRBS测试、信号处理技术和高效编码技术。最后,通过案例分析,本文展示了PRBS在
【GC4663传感器应用:提升系统性能的秘诀】:案例分析与实战技巧
# 摘要
GC4663传感器是一种先进的检测设备,广泛应用于工业自动化和科研实验领域。本文首先概述了GC4663传感器的基本情况,随后详细介绍了其理论基础,包括工作原理、技术参数、数据采集机制、性能指标如精度、分辨率、响应时间和稳定性。接着,本文分析了GC4663传感器在系统性能优化中的关键作用,包括性能监控、数据处理、系统调优策略。此外,本文还探讨了GC4663传感器在硬件集成、软件接口编程、维护和故障排除方面的
NUMECA并行计算工程应用案例:揭秘性能优化的幕后英雄
# 摘要
本文全面介绍NUMECA软件在并行计算领域的应用与实践,涵盖并行计算基础理论、软件架构、性能优化理论基础、实践操作、案例工程应用分析,以及并行计算在行业中的应用前景和知识拓展。通过探
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )