MATLAB三维数组与机器人技术:控制和导航,赋能智能机器人
发布时间: 2024-06-08 03:17:54 阅读量: 88 订阅数: 39 

ABB机器人及运动控制业务:赋能制造业 释放数字化价值.pdf

# 1. MATLAB三维数组的基本概念和操作**
三维数组是MATLAB中的一种数据结构,用于存储具有三个维度的元素。它可以表示三维空间中的数据,例如图像、点云和体积数据。
创建三维数组的语法为:
```matlab
A = zeros(m, n, p);
```
其中,`m`、`n`和`p`分别表示数组的三维大小。
访问三维数组中的元素可以使用下标,例如:
```matlab
A(i, j, k)
```
其中,`i`、`j`和`k`表示元素在三个维度上的索引。
# 2. 机器人运动控制中的三维数组应用
### 2.1 三维数组在机器人运动学中的建模
在机器人运动学中,三维数组被广泛用于表示机器人的几何结构和运动状态。例如,一个具有 n 个关节的机器人可以表示为一个 n×4 的齐次变换矩阵,其中前三列表示旋转矩阵,第四列表示平移向量。通过对齐次变换矩阵进行变换,可以获得机器人各关节的位姿和速度信息。
```
% 定义机器人齐次变换矩阵
T = [
1, 0, 0, 0;
0, 1, 0, 0;
0, 0, 1, 0;
0, 0, 0, 1
];
% 对齐次变换矩阵进行变换
T_new = T * [
1, 0, 0, dx;
0, 1, 0, dy;
0, 0, 1, dz;
0, 0, 0, 1
];
% 获取机器人关节位姿和速度信息
position = T_new(1:3, 4);
velocity = [
T_new(1:3, 1) * dx;
T_new(1:3, 2) * dy;
T_new(1:3, 3) * dz
];
```
### 2.2 三维数组在机器人动力学中的应用
#### 2.2.1 牛顿-欧拉方程的推导和求解
牛顿-欧拉方程是机器人动力学的基本方程,用于描述机器人各关节的力矩和加速度。三维数组可以用来表示牛顿-欧拉方程中的各种变量,如力矩、角速度和线加速度。通过对三维数组进行运算,可以求解出机器人的动力学参数。
```
% 定义机器人动力学参数
M = [
m1, 0, 0;
0, m2, 0;
0, 0, m3
];
C = [
0, 0, 0;
0, 0, 0;
0, 0, 0
];
G = [
0;
0;
-mg
];
% 求解牛顿-欧拉方程
tau = M * a + C * v + G;
```
#### 2.2.2 机器人动力学仿真
基于牛顿-欧拉方程,可以进行机器人动力学仿真,预测机器人的运动状态和受力情况。三维数组可以用来存储仿真过程中各时刻的机器人状态信息,如关节位置、速度和加速度。通过对三维数组进行可视化,可以直观地展示机器人的运动轨迹和受力分布。
```
% 定义仿真参数
dt = 0.01;
t = 0:dt:10;
% 初始化机器人状态
q = [0; 0; 0];
v = [0; 0; 0];
a = [0; 0; 0];
% 仿真循环
for i = 1:length(t)
% 计算机器人动力学参数
tau = M * a + C * v + G;
% 更新机器人状态
q = q + v * dt;
v = v + a * dt;
a = M \ (tau - C * v - G);
% 存储机器人状态信息
q_data(i, :) = q';
v_data(i, :) = v';
a_data(i, :) = a';
end
% 可视化机器人运动轨迹
figure;
plot3(q_data(:, 1), q_data(:, 2), q_data(:, 3));
xlabel('x');
ylabel('y');
zlabel('z');
title('机器人运动轨迹');
% 可视化机器人受力分布
figure;
plot(t, tau(:, 1), 'r', t, tau(:, 2), 'g', t, tau(:, 3), 'b');
xlabel('时间 (s)');
ylabel('力矩 (Nm)');
legend('关节 1', '关节 2', '关节 3');
title('机器人受力分布');
```
# 3. 机器人导航中的三维数组应用
### 3.1 三维数组在环境建模中的作用
#### 3.1.1 激光雷达数据处理和点云生成
激光雷达(LiDAR)是一种主动传感器,它通过发射激光脉冲并测量反射信号的时间

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
MATLAB 三维数组专栏深入探讨了三维数组在 MATLAB 中的强大功能。从数组操作的更高维度到数据处理的优化,再到图像处理、机器学习、数据分析、科学计算、工程模拟、医学成像、地球科学、遥感、计算机视觉、机器人技术、自动驾驶、无人机技术、虚拟现实和增强现实等领域的应用,专栏提供了全面的指南。通过深入理解数组结构和操作,读者可以解锁数据处理的新境界,提升模型性能,发现隐藏的趋势,解决复杂问题,构建逼真的模型,探索人体的新维度,揭示地球奥秘,提取卫星图像信息,赋予计算机“视觉”,控制和导航智能机器人,解锁自动驾驶潜力,探索空中新领域,创造身临其境的体验,并将数字世界与现实世界融合。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
QPSK调制解调信号处理艺术:数学模型与算法的实战应用
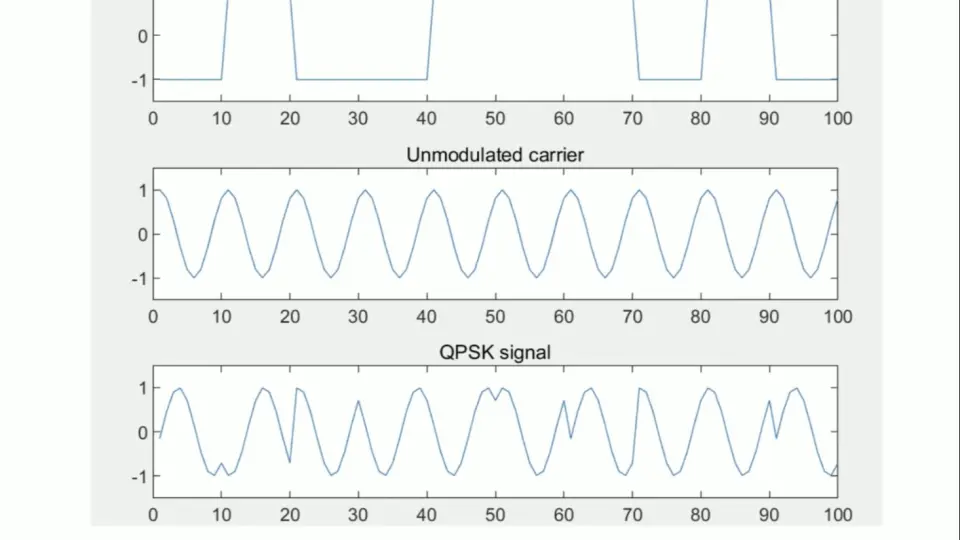
# 摘要
本文系统地探讨了QPSK(Quadrature Phase Shift Keying)调制解调技术的基础理论、实现算法、设计开发以及在现代通信中的应用。首先介绍了QPSK调制解调的基本原理和数学模型,包括信号的符号表示、星座图分析以及在信号处理中的应用。随后,深入分析了QPSK调制解调算法的编程实现步骤和性能评估,探讨了算法优化与
Chan氏算法之信号处理核心:揭秘其在各领域的适用性及优化策略

# 摘要
Chan氏算法作为信号处理领域的先进技术,其在通信、医疗成像、地震数据处理等多个领域展现了其独特的应用价值和潜力。本文首先概述了Cha
全面安防管理解决方案:中控标软件与第三方系统的无缝集成

# 摘要
随着技术的进步,安防管理系统集成已成为构建现代化安全解决方案的重要组成部分。本文首先概述了安防管理系统集成的概念与技术架构,强调了中控标软件在集成中的核心作用及其扩展性。其次,详细探讨了与门禁控制、视频监控和报警系统的第三方系统集成实践。在集成过程中遇到的挑战,如数据安全、系统兼容性问题以及故障排除等,并提出相应的对策。最后,展望了安防集成的未来趋势,包括人工智能、物联网技术
电力系统继电保护设计黄金法则:ETAP仿真技术深度剖析
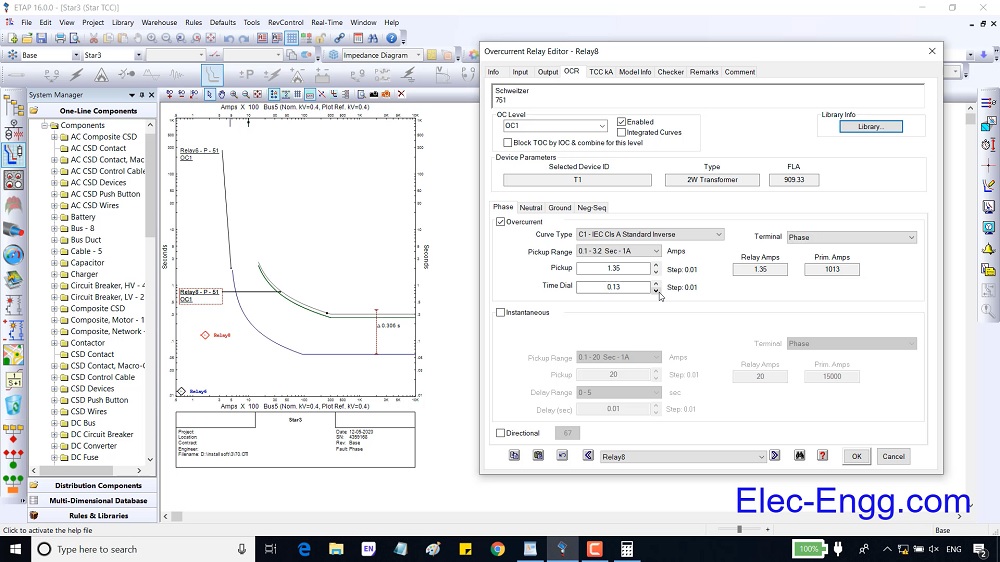
# 摘要
本文对电力系统继电保护进行了全面概述,详细介绍了ETAP仿真软件在继电保护设计中的基础应用与高级功能。文章首先阐述了继电保护的基本理论、设计要求及其关键参数计算,随后深入探讨了ETAP在创建电力系统模型、故障分析、保护方案配置与优化方面的应用。文章还分析了智能化技术、新能源并网对继电保护设计的影响,并展望了数字化转型下的新挑战。通过实际案例分析
进阶技巧揭秘:新代数控数据采集优化API性能与数据准确性

# 摘要
数控数据采集作为智能制造的核心环节,对提高生产效率和质量控制至关重要。本文首先探讨了数控数据采集的必要性与面临的挑战,并详细阐述了设计高效数据采集API的理论基础,包括API设计原则、数据采集流程模型及安全性设计。在实践方面,本文分析了性能监控、数据清洗预处理以及实时数据采集的优化方法。同时,为提升数据准确性,探讨了数据校验机制、数据一致性
从零开始学FANUC外部轴编程:基础到实战,一步到位

# 摘要
本文旨在全面介绍FANUC外部轴编程的核心概念、理论基础、实践操作、高级应用及其在自动化生产线中的集成。通过系统地探讨FANUC数控系统的特点、外部轴的角色以及编程基础知识,本文提供了对外部轴编程技术的深入理解。同时,本文通过实际案例,演示了基本与复杂的外部轴编程技巧,并提出了调试与故障排除的有效方法。文章进一步探讨了外部轴与工业机器人集成的高级功能,以及在生产线自动化
GH Bladed 高效模拟技巧:中级到高级的快速进阶之道

# 摘要
GH Bladed是一款专业的风力发电设计和模拟软件,广泛应用于风能领域。本文首先介绍了GH Bladed的基本概念和基础模拟技巧,涵盖软件界面、参数设置及模拟流程。随后,文章详细探讨了高级模拟技巧,包括参数优化和复杂模型处理,并通过具体案例分析展示了软件在实际项目中的应
【跨平台驱动开发挑战】:rockusb.inf在不同操作系统的适应性分析

# 摘要
本文旨在深入探讨跨平台驱动开发领域,特别是rockusb.inf驱动在不同操作系统环境中的适配性和性能优化。首先,对跨平台驱动开发的概念进行概述,进而详细介绍rockusb.inf驱动的核心功能及其在不同系统中的基础兼容性。随后,分别针对Windows、Linux和macOS操作系统下rockusb.inf驱动的适配问题进行了深入分
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )