KUKA机器人的PROFINET集成:从新手到专家的配置秘籍
发布时间: 2024-12-23 21:05:37 阅读量: 6 订阅数: 2 

KUKA机器人PROFINET通信KOP软件包.zip
# 摘要
随着工业自动化技术的发展,KUKA机器人与PROFINET技术的集成已成为提高生产效率和自动化水平的关键。本文首先介绍KUKA机器人与PROFINET集成的基础知识,然后深入探讨PROFINET技术标准,包括通信协议、架构和安全性分析。在此基础上,文章详细描述了KUKA机器人的PROFINET配置方法,涵盖硬件准备、软件配置及故障诊断。进一步地,文章探讨了高级应用,如与PLC的通信、网络管理与维护,以及安全集成与性能优化。最后,通过案例研究,展示了KUKA机器人在自动化生产线中的应用效果和遇到挑战的处理策略。本文旨在为自动化领域工程师提供全面的集成与应用指导,以实现高效、安全的机器人控制系统。
# 关键字
KUKA机器人;PROFINET;集成技术;通信协议;故障诊断;自动化生产线
参考资源链接:[KUKA PROFINET M/S 4.1:系统软件8.5集成指南](https://wenku.csdn.net/doc/6412b725be7fbd1778d493fa?spm=1055.2635.3001.10343)
# 1. KUKA机器人与PROFINET集成基础
在自动化领域,KUKA机器人与PROFINET网络技术的结合,是实现高效、灵活和可扩展的生产系统的关键。本章将为读者介绍KUKA机器人与PROFINET集成的基本概念,以及为何这种集成在现代工业环境中变得越来越普遍和必要。
## 1.1 KUKA机器人技术简介
KUKA是一家知名的工业机器人制造商,其产品广泛应用于汽车、电子、食品和饮料等众多行业。KUKA机器人以其高精度、高性能和高可靠性在业内享有盛誉。为了适应多样化的工业需求,KUKA机器人的控制系统设计得既模块化又灵活,能够轻松集成到各种生产线中。
## 1.2 PROFINET技术概述
PROFINET是一种工业以太网标准,它基于IEC 61158标准和IEC 61784-2规范,广泛应用于自动化控制系统。PROFINET具有高速实时通讯能力、数据集成以及对等通讯等特点,支持分布式自动化和集中式的项目配置。
## 1.3 KUKA机器人与PROFINET集成的优势
集成KUKA机器人与PROFINET网络技术的主要优势在于能够实现设备间的无缝通信,这对于提高生产线的灵活性和生产效率至关重要。通过集成,KUKA机器人能够实时响应控制系统的变化指令,并执行复杂的生产任务。此外,网络的实时性确保了在生产过程中对机器人进行精确控制,对于实现高度自动化及优化生产流程来说,这是不可或缺的。
在下一章节中,我们将深入探讨PROFINET技术标准,以及如何将其与KUKA机器人有效集成,实现工业自动化和控制。
# 2. 深入理解PROFINET技术标准
## 2.1 PROFINET通信协议概述
### 2.1.1 PROFINET的历史与发展
PROFINET是基于工业以太网技术的现场总线标准,由 PROFIBUS 用户组织(PNO)开发。它旨在将传统工业自动化领域内的现场设备与现代信息技术(IT)连接起来,通过网络实现对现场设备的实时控制。PROFINET 的发展经历了从PROFIBUS到PROFINET的过程,其背后的理念是简化网络结构、提高数据吞吐量、减少硬件投资成本以及兼容现有的 PROFIBUS 系统。
PROFINET 从2004年开始发布第一版,至今已经历了多个版本的迭代。随着技术的进步,PROFINET不断更新以适应市场需求。例如,PROFINET IRT(Isochronous Real-Time)技术的引入,提供了确定性时间通信,满足了高速周期性任务的要求,使得工业自动化领域的通信更加精准可靠。
### 2.1.2 PROFINET的架构和通信机制
PROFINET 的架构设计以模块化和可扩展性为基础,采用了开放和标准化的技术。它的网络结构大致可分为三个层次:
- **管理层**:负责整个网络的配置、监控和管理。使用诸如SNMP(Simple Network Management Protocol)或Web接口等管理协议。
- **控制层**:与工业自动化应用层接口,处理数据采集、控制逻辑执行等任务。控制层通常使用TCP/IP协议通信。
- **设备层**:即现场设备层,直接与传感器、执行器等设备通信。可以使用标准的以太网帧或者更高效的实时通信技术。
PROFINET 通信机制包含实时通信、实时数据交换和时间同步等关键特性。实时通信基于标准以太网,可以通过交换机和路由器实现,但为了确保实时性能,PROFINET IRT技术需要在交换机和网络硬件支持下使用专用的传输机制,如以太网同步报文(IEEE 1588)来实现时间同步。
## 2.2 PROFINET集成的关键组件
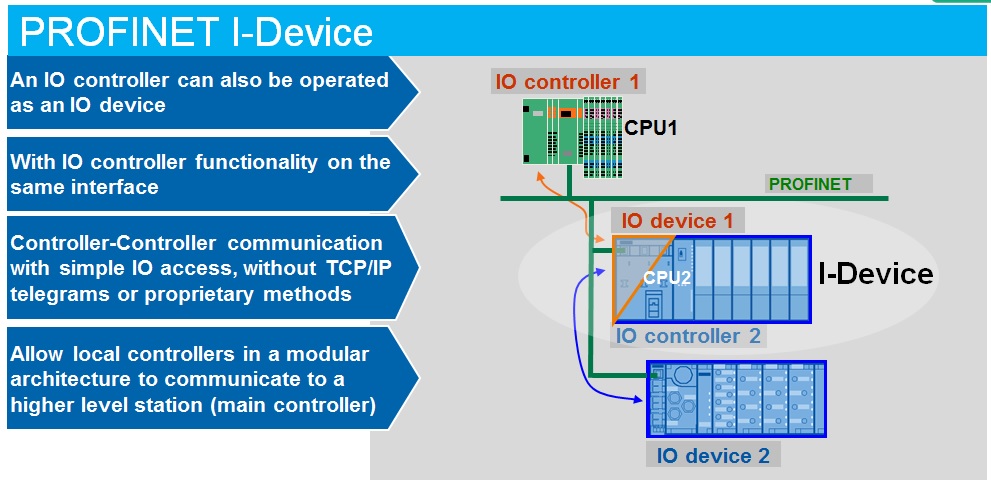
### 2.2.1 IO控制器与IO设备
在PROFINET系统中,IO控制器(IO Control)是整个系统的大脑,它负责收集现场数据,并根据控制逻辑发送命令。IO控制器通常位于PLC(可编程逻辑控制器)中。IO设备(IO Device)则是实现具体输入输出功能的设备,例如传感器、执行器等,它们被集成到PROFINET网络中,通过网络发送或接收数据。
IO控制器与IO设备之间的通信是基于“生产者-消费者”模型。IO控制器作为生产者,周期性地向IO设备发送数据(即刷新输出),而IO设备作为消费者,周期性地向IO控制器报告其状态(即刷新输入)。
### 2.2.2 网络设备和诊断工具
为了实现高效的通信,PROFINET网络依赖于各种网络设备,如交换机、路由器和代理设备等。网络设备负责数据包的传递,而高级的交换机和路由器还可以对网络流量进行优先级划分,确保关键数据流的实时性。
网络诊断工具在调试和维护PROFINET系统时是必不可少的。这些工具可以检测网络的健康状况、数据交换的效率以及设备的通信状态。常见的诊断工具有PROFINET的配置和诊断软件,比如Siemens的TIA Portal或Rockwell Automation的Studio 5000等,它们可以显示网络通信状态,并帮助工程师进行故障排查。
## 2.3 PROFINET安全性分析
### 2.3.1 安全机制与标准
安全机制对于任何工业控制系统来说都是至关重要的。PROFINET 为确保网络通信的安全性,引入了多种机制和标准。其中,信息安全是通过实现访问控制、数据加密、认证和审计来实现的。
- **访问控制**:确保只有授权的设备和用户才能访问网络资源。
- **数据加密**:通过采用SSL/TLS等协议来保护数据在传输过程中的安全性。
- **认证机制**:通过数字证书或其它认证方法来验证设备和用户的合法性。
- **审计和监控**:记录网络行为,为未来分析和诊断提供数据支持。
### 2.3.2 安全配置的最佳实践
为了充分发挥PROFINET的安全性,以下是一些最佳实践:
- **最小权限原则**:只给必要的设备或用户配置它们工作所需的最低权限。
- **定期更新**:定期更新固件和软件,确保所有安全漏洞得到及时修复。
- **网络隔离**:将关键的生产和控制网络与其他网络隔离开来,比如办公网络。
- **强化密码政策**:使用强密码,并定期更换,确保系统的安全性不被轻易破解。
- **监控和响应**:实施实时监控和快速响应机制,以应对可能的安全事件。
通过上述措施,可以大幅提高PROFINET系统的整体安全性,减少安全事件发生的几率,保护生产和控制系统不受外部威胁。
# 3. KUKA机器人的PROFINET配置方法
## 3.1 KUKA机器人的硬件准备与安装
### 3.1.1 确认硬件兼容性
当将KUKA机器人与PROFINET集成时,第一步是确认机器人控制器和所需IO设备的硬件兼容性。兼容性检查确保您所选的硬件可以正常地与PROFINET网络通信。首先,您需要检查KUKA控制器的技术规格,确认它支持PROFINET通信协议。此外,应验证所选IO模块的型号和序列号,这些通常可以在KUKA官方文档或者产品说明书中找到。
硬件兼容性确认后,下一步是查看硬件版本是否与您计划使用的软件版本兼容。KUKA提供了详细的硬件兼容性表,这些表格能够帮助您快速确定控制器与网络设备间的兼容情况。如果硬件不符合兼容性要求,可能需要升级控制器固件或者更换相应的硬件组件。
### 3.1.2 硬件连接步骤
一旦硬件兼容性确认,接下来是实际的硬件连接步骤。在连接过程中,务必遵循以下步骤来确保安全和效率:
1. **断开电源**:在连接任何硬件之前,确保控制器和IO设备电源已经完全断开,以避免任何电击或损坏的风险。
2. **安装IO设备**:根据KUKA的安装指南,将IO设备正确安装在机器人控制器中。
3. **连接电缆**:将IO设备与网络电缆正确连接,确保电缆连接稳固且正确。在某些情况下,您可能需要使用特定的电缆接头工具。
4. **检查连接**:使用万用表等工具检查电缆连接是否正确,并确保没有短路或开路情况。
5. **上电测试**:完成所有连接后,重新上电,并观察控制器上的指示灯状态,确保设备正常工作。
完成这些步骤后,硬件连接部分就完成了,为下一步的软件配置打下了坚实的基础。
## 3.2 软件配置与参数设置
### 3.2.1 使用KUKA System Software进行配置
KUKA机器人的PROFINET配置在KUKA System Software (KSS)中进行,这是一个集成了机器人控制、配置和诊断功能的软件平台。配置过程主要涉及以下步骤:
1. **启动KUKA System Software**:从KUKA提供的安装媒体中启动KSS。
2. **创建或打开项目**:根据您的需求创建一个新的配置项目或打开一个现有项目。
3. **添加PROFINET设备**:在配置树中,找到并双击“PROFINET”节点,选择“添加设备”来添加新的PROFINET IO设备。
4. **分配网络参数**:为每个新添加的PROFINET设备分配IP地址和子网掩码,确保它们与工厂网络参数相匹配。
5. **保存配置**:完成设置后,保存您的配置并准备进行编译。
### 3.2.2 设置PROFINET通信参数
通信参数的设置直接影响KUKA机器人与PROFINET网络的通信效率和稳定性。设置包括:
1. **设备名称和设备ID**:为每个PROFINET设备指定一个唯一的名称和设备ID。
2. **周期性通信**:设置周期性数据交换的时间间隔,例如,IO控制器与IO设备之间的数据更新频率。
3. **触发通信**:配置特定事件触发的数据交换,如机器人操作完成时触发的事件。
4. **诊断地址**:指定用于接收设备诊断信息的地址。
5. **确认设置**:完成参数配置后,确保所作更改得到系统确认,并且没有产生错误。
完成上述设置后,您应该进行一次通信测试,以确保配置正确并且设备能正常通信。
## 3.3 故障诊断与调试
### 3.3.1 诊断工具的使用
面对网络配置问题或通信故障时,有效的诊断工具可以大幅度提高问题解决的效率。KUKA System Software提供了多个诊断工具来帮助用户监测网络和设备状态:
1. **诊断日志**:查看实时诊断日志,了解最新的系统和通信状态。
2. **网络状态监控**:在系统软件中查看所有连接的PROFINET设备和它们的连接状态。
3. **诊断消息分析**:详细分析诊断消息,包括错误代码、发生时间以及可能的解决方案。
4. **网络扫描工具**:运行网络扫描,检测网络中活跃的设备和它们的配置参数。
### 3.3.2 常见故障的排除方法
面对常见的网络故障,可以采取以下步骤进行排查和解决:
1. **检查电源和电缆连接**:确保所有的物理连接都正确无误,并且没有损坏。
2. **网络参数检查**:确认所有设备的网络参数设置正确,比如IP地址、子网掩码和设备ID。
3. **重启设备**:有时候简单的重启设备可以解决临时的通信故障。
4. **使用诊断工具**:利用KUKA System Software提供的诊断工具,检查设备状态和通信消息。
5. **更新固件**:如果存在已知的软件问题,考虑更新到最新的控制器固件。
6. **咨询技术支持**:如果以上步骤都无法解决问题,可以考虑联系KUKA的技术支持部门。
通过上述方法,您将能够有效地诊断并解决KUKA机器人在PROFINET网络中的常见问题。
# 4. KUKA机器人PROFINET集成的高级应用
## 4.1 实现KUKA机器人与PLC的无缝通信
### PLC与机器人之间的数据交换
在自动化生产环境中,KUKA机器人与PLC(可编程逻辑控制器)之间的无缝通信是实现高效协作的关键。数据交换不仅涉及到传感器和执行器的状态信息,还包括控制指令和复杂的数据结构。为了实现这一点,需要对PLC程序和KUKA机器人控制器进行精确配置。
首先,定义通信协议是至关重要的,这包括数据格式、通信速率和同步机制等。通常,KUKA机器人支持多种通信协议,如PROFINET IO、EtherCAT或Modbus TCP等。以PROFINET为例,数据交换可以通过直接IO映射或结构化数据的方式进行。
例如,KUKA机器人控制器可以被配置为PROFINET IO设备,这样,它就可以作为PLC的远程IO站点。在这种情况下,PLC可以将输出数据写入KUKA机器人控制器的特定IO地址,以此来控制机器人的动作。反之,机器人控制器也可以通过相同的机制将状态和诊断数据发送回PLC。
### 实现复杂控制逻辑的方法
对于需要更高层次协调和决策的任务,简单数据交换是不够的。这时,需要实现复杂的控制逻辑,以确保机器人和PLC可以执行决策支持的自动化任务。
利用KUKA提供的高级功能,例如KUKA Robot Language (KRL)或KUKA WorkVisual,可以开发高级控制逻辑。KRL是一种专门为了编程和操作机器人而设计的语言,可以用于实现复杂的控制序列,比如条件语句、循环和算术运算。
控制逻辑可以被集成进PLC的程序中,也可以被设计在KUKA机器人的控制器上。例如,可以编写一个KRL程序来处理机器人的路径规划和动态避障。PLC可以通过发送特定的触发信号或数据到KUKA机器人控制器来启动这些预设的控制逻辑。
为了实现复杂控制逻辑,还需要深入了解工业以太网通信标准PROFINET的实时性特点。实时性对于保证生产过程的连贯性和响应时间至关重要,尤其是在需要高速数据交换和处理的应用中。
### 实现复杂控制逻辑的步骤
实现这一级别的集成和控制逻辑,通常需要以下步骤:
1. **需求分析**:首先,需要明确通信和控制逻辑的要求。包括需要交换哪些数据,控制逻辑需要满足哪些功能,以及系统的实时性要求。
2. **系统设计**:在这一阶段,设计师需要确定KUKA机器人控制器与PLC之间的硬件连接方案,以及在两者之间交换数据的方式。
3. **编写和测试PLC程序**:按照设计的逻辑编写PLC程序,并在实际应用之前进行充分测试。
4. **编写和测试KRL程序**:在KUKA机器人控制器上编写KRL程序,实现PLC控制逻辑的机器人端部分,并进行测试。
5. **集成与调试**:将PLC程序和KRL程序集成在一起,进行全系统的调试,确保两个系统能够无缝通信和正确执行控制逻辑。
6. **生产部署**:在确认无误后,部署系统到生产环境中,并持续监控以确保系统稳定运行。
## 4.2 网络管理与维护
### 网络参数的监控与优化
为了确保KUKA机器人与PLC间的PROFINET通信可以稳定运行,监控和优化网络参数是不可忽视的环节。网络参数的设置直接影响到数据传输的效率和系统的响应时间。因此,网络管理成为了实现高效集成的关键部分。
在KUKA机器人控制器和PLC的通信配置中,包括网络接口的地址分配、数据交换频率和缓冲区大小等参数都需要根据实际情况进行调整。适当的参数配置可以减少通信延迟,避免数据溢出和传输错误。
### 网络故障的预防与处理
尽管精心配置可以预防大多数网络故障,但不可预见的问题仍然可能发生。因此,有效的网络故障预防和处理策略对于保障生产连续性至关重要。
通常,故障预防从以下几个方面着手:
- **网络冗余设计**:在设计时就考虑网络的冗余性,比如增加备份通讯路径,可以避免单点故障导致整个系统的瘫痪。
- **实时监控系统**:使用网络监控工具来实时观察网络状态,包括流量、延迟和错误包计数等,一旦发现异常就及时采取措施。
- **定期检查与测试**:周期性地对网络设备和通信连接进行检查和测试,确保没有物理损害或配置错误。
对于网络故障的处理,通常需要:
- **故障诊断工具**:使用专业的网络分析工具来诊断故障,这些工具能够提供详细的网络数据包信息和错误日志。
- **隔离故障点**:迅速定位故障点,并将其从系统中隔离,以减少对整体系统的影响。
- **快速恢复机制**:根据预先设定的故障应对策略,快速恢复系统的通信能力,保证生产不会因故障而停止太长时间。
## 4.3 安全集成与性能优化
### 安全集成的最佳实践
安全是工业自动化系统中的首要考虑因素。在KUKA机器人与PLC集成的环境中,安全集成意味着保护人员、机器人、设备以及整个生产流程免受潜在危害。安全集成的最佳实践包括:
- **遵循行业标准**:确保集成工作遵循了相关的国际和国内安全标准,例如IEC 61508,IEC 61800-5-2等。
- **使用安全控制器**:在可能的情况下使用具备安全功能的硬件和软件,如安全PLC或安全网络组件。
- **风险评估和缓解**:进行详细的风险评估,并针对发现的风险设计缓解措施,包括紧急停止、安全监测和安全逻辑的实现。
### 性能调优的策略与技巧
在KUKA机器人和PLC的集成应用中,系统性能的调优是确保最佳运行效率的关键。调优策略通常包括:
- **优化数据处理逻辑**:重新评估和修改KRL程序和PLC程序中的逻辑,以减少不必要的处理和数据传输。
- **使用高效算法**:在可能的情况下,采用更高效的算法来提高计算和处理速度。
- **调整网络参数**:监控网络性能,并根据实际数据传输需求调整参数设置。
### 性能调优实践案例
以下是进行性能调优的一个实践案例:
假设一个自动化生产线中KUKA机器人需要和PLC进行频繁的数据交换,并且生产线对实时性和准确性有较高的要求。初始配置时,发现机器人动作出现延迟和偶尔的错误响应。通过对系统性能进行分析,我们发现以下问题:
1. **网络带宽不足**:由于数据交换频繁,网络带宽成为瓶颈。
2. **数据处理逻辑过于复杂**:在KUKA机器人控制器和PLC程序中存在一些复杂的计算,导致响应时间变长。
3. **参数设置不当**:网络参数设置没有针对实时数据传输进行优化。
针对上述问题,采取以下措施进行性能调优:
1. **升级网络硬件**:更换更高带宽的网络硬件,减少数据传输的延迟。
2. **优化数据处理逻辑**:对KRL程序和PLC程序进行重构,以减少不必要的计算和简化逻辑流程。
3. **调整网络参数**:根据实际数据交换需求调整缓冲区大小、传输频率和时序参数。
通过这些调整,系统性能得到显著提升,机器人能够更加准确和迅速地响应PLC的控制信号,从而提升了整个生产线的效率。
这一章节展示了在KUKA机器人与PLC的集成过程中实现高级应用的具体实践,包括如何实现无缝通信、网络管理、安全集成和性能优化。通过本章节的讨论,我们深入理解了在自动化系统集成中,如何通过技术手段保障系统稳定、高效和安全地运行。
# 5. 案例研究与实际应用
## 5.1 KUKA机器人在自动化生产线中的应用
### 5.1.1 自动化生产线的集成方案
在现代工业制造中,自动化生产线的应用是提升效率和质量的关键。KUKA机器人作为工业自动化领域的佼佼者,其与PROFINET的集成方案可以为自动化生产线提供强大的控制和灵活的配置能力。集成方案的关键在于确保机器人能够与生产线上的其他自动化设备无缝通信,并且能够高效地完成特定的生产任务。
例如,一个典型的自动化生产线可能包括传送带、传感器、PLC(可编程逻辑控制器)、视觉系统等。在这种集成方案中,KUKA机器人可以作为执行单元,通过PROFINET网络接收来自PLC的指令,对生产线上的物料进行精准的操作,如拾取、放置、装配等。同时,KUKA机器人也可以输出状态信息至PROFINET网络,供其他设备或系统监控与分析。
### 5.1.2 提升生产效率的实际案例
一个具体的案例是在汽车制造业中,KUKA机器人与PROFINET集成后,实现了发动机部件的自动装配。在该应用中,机器人首先通过PROFINET接收启动信号,然后在视觉系统的辅助下精准定位零件,接着根据PLC的指令完成组装工作。整个过程通过网络的实时通信和数据交换实现高效控制,大大减少了人为干预和错误率,实现了生产效率的显著提升。
在另一个案例中,KUKA机器人被应用于食品加工生产线。通过与温度传感器、质量检测系统等设备的集成,机器人可以根据实时数据自动调整工作参数,如调整抓取力度以适应不同材质的包装盒,或在质量检测不合格时自动停机。这些应用不仅提高了生产效率,也确保了产品的一致性和可靠性。
## 5.2 遇到挑战:故障排除与升级策略
### 5.2.1 典型问题诊断与解决
在KUKA机器人与PROFINET集成的实际应用中,我们经常会遇到各种挑战。常见的问题包括网络通信不稳定、机器人响应迟缓、生产任务执行错误等。解决这些问题通常需要深入分析,从硬件设置、软件配置到网络诊断,多方面进行排查。
例如,在网络通信不稳定的情况下,可以先检查网络布线是否正确,网络设备(如交换机和路由器)是否工作正常。使用网络诊断工具(如wireshark)来捕获通信数据包,分析是否存在数据丢失或延迟。根据诊断结果,可以对网络进行重新配置或优化网络参数来提高稳定性和响应速度。
### 5.2.2 升级与维护的最佳实践
随着生产需求的不断变化和技术的进步,KUKA机器人和PROFINET集成系统也需要定期进行升级和维护。一个良好的升级策略包括事前的充分测试和计划,以及事后的系统回滚方案,确保升级过程中对生产的影响降到最低。
在升级过程中,建议采用模块化的方式逐步进行,从软件系统更新到硬件设备升级,每完成一个阶段都要进行全面的测试以确保系统的稳定性。同时,要保留完整的系统配置和日志记录,以便在出现问题时能够快速定位和解决。
定期的系统维护也是保障集成系统稳定运行的关键。这包括定期检查硬件设备的运行状态,更新防病毒软件和补丁程序,以及对系统参数进行调优,确保系统性能的持续优化。
通过这些实践,可以确保KUKA机器人与PROFINET集成的生产线长期高效运行,为制造企业带来持续的竞争优势。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏提供有关 PROFINET 通信协议和 KUKA 机器人集成的全面指南。它涵盖了从新手到专家的配置技巧、故障排除指南、性能监控最佳实践以及与 PLC 无缝通信的解决方案。专栏还深入探讨了高级诊断、网络设计、数据同步和互操作性挑战,为读者提供了在工业自动化网络中有效使用 KUKA 机器人的全面知识。通过遵循这些实用技巧和专家建议,读者可以最大限度地提高 KUKA 机器人系统的性能和可靠性,从而优化工业自动化流程。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
深入剖析IEC62055-41:打造无懈可击的电能表数据传输

# 摘要
本文深入探讨了IEC 62055-41标准在电能表数据传输中的应用,包括数据传输基础、实现细节、测试与验证、优化与改进以及面向未来的创新技术。首先,介绍了电能表数据传输原理、格式编码和安全性要求。随后,详细分析了IEC 62055-41标准下的数据帧结构、错误检测与校正机制,以及可靠性策略。文中还讨论了如何通过测试环
ZYPLAYER影视源的自动化部署:技术实现与最佳实践指南
# 摘要
ZYPLAYER影视源自动化部署是一套详细的部署、维护、优化流程,涵盖基础环境的搭建、源码的获取与部署、系统维护以及高级配置和优化。本文旨在为读者提供一个关于如何高效、可靠地搭建和维护ZYPLAYER影视源的技术指南。首先,文中讨论了环境准备与配置的重要性,包括操作系统和硬件的选择、软件与依赖安装以及环境变量与路径配置。接着,本文深入解析ZYPLAYER源码的获取和自动化部署流程,包
【Infineon TLE9278-3BQX深度剖析】:解锁其前沿功能特性及多场景应用秘诀

# 摘要
本文旨在全面介绍Infineon TLE9278-3BQX芯片的各个方面。首先概述了TLE9278-3BQX的硬件特性与技术原理,包括其硬件架构、关键组件、引脚功能、电源管理机制、通讯接口和诊断功能。接着,文章分析了TLE9278-3BQX在汽车电子、工业控制和能源系统等不同领域的应用案例。此外,本文还探讨了与TL
S7-1200 1500 SCL指令故障诊断与维护:确保系统稳定性101
# 摘要
本论文深入介绍了S7-1200/1500 PLC和SCL编程语言,并探讨了其在工业自动化系统中的应用。通过对SCL编程基础和故障诊断理论的分析,本文阐述了故障诊断的理论基础、系统稳定性的维护策略,以及SCL指令集在故障诊断中的应用案例。进一步地,文中结合实例详细讨论了S7-1200/1500 PLC系统的稳定性维
93K消息队列应用:提升系统的弹性和可靠性,技术大佬的系统设计智慧
# 摘要
本文首先介绍了消息队列的基础知识和在各种应用场景中的重要性,接着深入探讨了消息队列的技术选型和架构设计,包括不同消息队列技术的对比、架构原理及高可用与负载均衡策略。文章第三章专注于分布式系统中消息队列的设计与应用,分析了分布式队列设计的关键点和性能优化案例。第四章讨论了
ABAP流水号的集群部署策略:在分布式系统中的应用
# 摘要
本文全面探讨了ABAP流水号在分布式系统中的生成原理、部署策略和应用实践。首先介绍了ABAP流水号的基本概念、作用以及生成机制,包括标准流程和特殊情况处理。随后,文章深入分析了分布式系统架构对流水号的影响,强调了集群部署的必要性和高可用性设计原则。通过实际应用场景和集群部署实践的案例分析,本文揭示了实现AB
作物种植结构优化:理论到实践的转化艺术

# 摘要
本文全面探讨了作物种植结构优化的理论基础、实践案例、技术工具和面临的挑战。通过分析农业生态学原理,如生态系统与作物生产、植物与土壤的相互作用,本文阐述了优化种植结构的目标和方法,强调了成本效益分析和风险评估的重要性。章节中展示了作物轮作、多样化种植模式的探索以及
KST Ethernet KRL 22中文版:数据备份与恢复,最佳实践全解析

# 摘要
本文旨在全面探讨KST Ethernet KRL 22中文版的数据备份与恢复理论和实践。首先概述了KST Ethernet KRL 22的相关功能和数据备份的基本概念,随后深入介绍了备份和恢复的各种方法、策略以及操作步骤。通
FANUC-0i-MC参数升级与刀具寿命管理:综合优化方案详解
# 摘要
本论文旨在全面探讨FANUC 0i-MC数控系统的参数升级理论及其在刀具寿命管理方面的实践应用。首先介绍FANUC 0i-MC系统的概况,然后详细分析参数升级的必要性、原理、步骤和故障处理方法。接着,深入刀具寿命管理的理论基础,包括其概念、计算方法、管理的重要性和策略以及优化技术。第四章通过实际案例,说明了如何设置和调整刀具寿命参数,并探讨了集成解决方案及效果评估。最后,本文提出了一个综合优化方案,并对其实施步骤、监控与评估进行了讨论。文章还预测了在智能制造背景下参数升级与刀具管理的未来发展趋势和面临的挑战。通过这些分析,本文旨在为数控系统的高效、稳定运行和刀具寿命管理提供理论支持和
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )