C语言编程指南:Micro SD卡SPI模式下高效数据通信的实现
发布时间: 2024-12-03 18:36:51 阅读量: 47 订阅数: 28 

micro_sd.rar_MICRO SD SPI _Micro SD卡SPI_STM32F103 SPI sd_micro S
参考资源链接:[Micro SD卡(TF卡)SPI模式操作详解](https://wenku.csdn.net/doc/6412b4cbbe7fbd1778d40d7a?spm=1055.2635.3001.10343)
# 1. C语言与Micro SD卡通信概述
## 1.1 通信的必要性与应用前景
在嵌入式系统和小型计算机中,数据存储是一个不可或缺的部分。Micro SD卡以其小型化、高容量和良好的兼容性,成为了这些设备中常用的存储解决方案。C语言以其高效、灵活和接近硬件的特性,成为开发此类硬件通信的理想选择。
## 1.2 C语言在硬件通信中的优势
使用C语言开发Micro SD卡通信接口的主要优势包括对硬件操作的精细控制、编译效率高以及可移植性好。C语言允许开发者直接与硬件寄存器进行交互,这对于实现高速数据传输和控制存储介质至关重要。
## 1.3 本章内容概览
本章将从概述C语言与Micro SD卡通信的基本概念开始,为读者建立一个全局的认识。随后,章节逐步深入,探讨SPI通信协议、驱动开发以及数据安全等关键话题。通过这一系列讲解,旨在帮助IT专业人士和爱好者掌握C语言在硬件通信领域的应用技巧。
# 2. SPI通信协议的理论基础
## 2.1 SPI协议工作原理
### 2.1.1 SPI模式介绍
SPI(Serial Peripheral Interface)是一种高速的、全双工、同步的通信总线,它主要用于微处理器与外围设备之间进行通信。SPI有四种模式,模式0到模式3,主要由时钟极性和相位决定。这四种模式对应于不同的CPOL(时钟极性)和CPHA(时钟相位)设置:
- **模式0** (CPOL=0, CPHA=0):时钟空闲时为低电平,数据在时钟的第一个跳变沿采样。
- **模式1** (CPOL=0, CPHA=1):时钟空闲时为低电平,数据在时钟的第二个跳变沿采样。
- **模式2** (CPOL=1, CPHA=0):时钟空闲时为高电平,数据在时钟的第一个跳变沿采样。
- **模式3** (CPOL=1, CPHA=1):时钟空闲时为高电平,数据在时钟的第二个跳变沿采样。
选择哪种模式取决于你的硬件和外设的要求,这些模式确保了设备之间的兼容性。
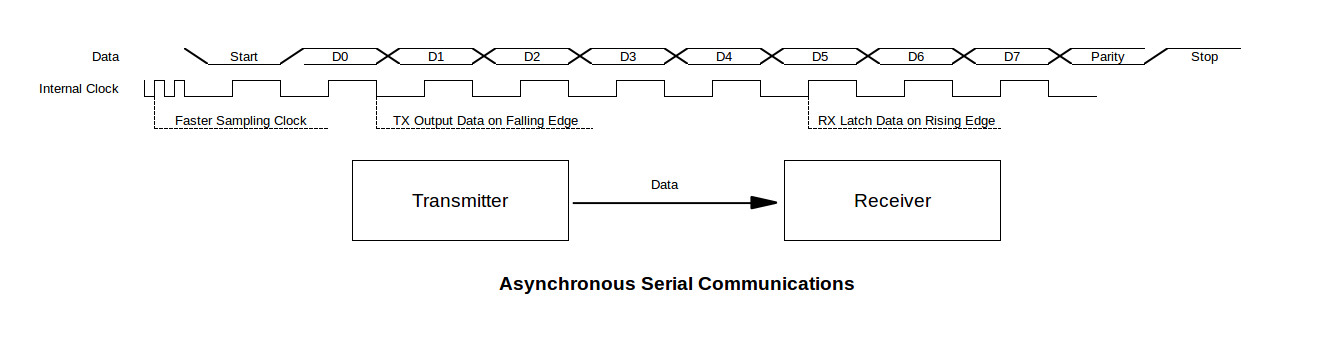
### 2.1.2 SPI通信时序分析
在进行SPI通信时,首先需要进行初始化配置,包括时钟速率、时钟极性和相位、数据位宽等参数。一旦配置完成,主设备会生成时钟信号,并通过主出从入(MOSI)和主入从出(MISO)线与从设备交换数据。
以下是一个典型的SPI通信时序图,描述了在模式0下,数据是如何在主从设备间传输的:
```mermaid
sequenceDiagram
participant 主设备
participant 从设备
Note over 主设备,从设备: SPI模式0: CPOL=0, CPHA=0
主设备 ->> 从设备: CS低电平开始通信
Note over 主设备,从设备: 第一个时钟边沿之前数据出现在MOSI线
主设备 ->> 从设备: 发送时钟信号
Note over 主设备,从设备: MOSI上的数据在时钟的第一个边沿采样
Note over 主设备,从设备: MISO上的数据在时钟的第二个边沿采样
Note over 主设备,从设备: CS高电平结束通信
```
在每个时钟边沿,数据的采样和发送操作同步进行。这保证了数据传输的准确性和稳定性。
## 2.2 SPI协议在C语言中的实现
### 2.2.1 SPI通信函数的编写
在C语言中实现SPI通信,首先需要定义相应的函数来初始化SPI设备,以及发送和接收数据。例如,可以通过直接操作硬件寄存器来控制SPI硬件模块。
以下是一个SPI发送和接收数据的简单函数示例:
```c
#include <stdint.h>
// 定义SPI硬件寄存器的地址
#define SPI_REG_CONTROL (*(volatile uint32_t*)0x4003C000)
#define SPI_REG_STATUS (*(volatile uint32_t*)0x4003C004)
#define SPI_REG_DATA (*(volatile uint32_t*)0x4003C008)
// 控制位定义
#define SPI_ENABLE (1 << 0)
#define SPI_MASTER_MODE (1 << 1)
#define SPI_RX_INT_ENABLE (1 << 2)
#define SPI_TX_INT_ENABLE (1 << 3)
// 初始化SPI为Master模式
void spi_init() {
SPI_REG_CONTROL = SPI_ENABLE | SPI_MASTER_MODE;
}
// 发送数据到SPI
void spi_send_data(uint8_t data) {
// 等待直到上一个数据发送完成
while (!(SPI_REG_STATUS & (1 << 8)));
// 发送数据
SPI_REG_DATA = data;
}
// 从SPI接收数据
uint8_t spi_receive_data() {
// 等待数据接收完成
while (!(SPI_REG_STATUS & (1 << 9)));
// 返回接收到的数据
return (uint8_t)SPI_REG_DATA;
}
```
### 2.2.2 SPI错误处理与异常管理
在SPI通信过程中,可能会遇到各种错误和异常情况,如通信超时、数据接收错误等。因此,实现错误处理和异常管理对于确保通信的可靠性至关重要。
```c
#define SPI_TIMEOUT 1000 // 设置超时时间
// 发送数据并等待接收
uint8_t spi_transfer_data(uint8_t data) {
uint32_t timeout = 0;
// 发送数据
spi_send_data(data);
// 等待数据发送和接收完成
while (!(SPI_REG_STATUS & (1 << 9)) && timeout < SPI_TIMEOUT) {
timeout++;
}
if(timeout >= SPI_TIMEOUT) {
// 处理超时错误
return SPI_ERROR_TIMEOUT;
}
return (uint8_t)SPI_REG_DATA;
}
```
## 2.3 SPI与Micro SD卡的交互细节
### 2.3.1 SD卡初始化流程
SD卡的初始化是通过发送一系列的命令来完成的。初始化流程包括复位SD卡、发送初始化命令序列以及检查SD卡是否工作在SPI模式下。
```c
// SD卡初始化命令序列
uint8_t sd_init_sequence[] = {
0x40, 0x00, 0x00, 0x00, 0x00, 0x95, // CMD0
0x48, 0x00, 0x00, 0x01, 0xAA, // CMD8
// ... 其他初始化命令
};
// 发送初始化命令序列到SD卡
void sd_init() {
for(int i = 0; i < sizeof(sd_init_sequence); i++) {
spi_send_data(sd_init_sequence[i]);
if(i == 0) {
// 等待CMD0的响应
uint8_t response = spi_receive_data();
// ... 检查响应
}
// ... 其他命令的发送和响应处理
}
// 检查是否工作在SPI模式
// ...
}
```
### 2.3.2 SD卡的命令集和响应机制
SD卡有一套完整的命令集,用于控制SD卡的读写等操作。每个命令都有对应的响应,响应可以是R1、R1b、R2、R3、R7等类型,每种类型的响应具有不同的格式和长度。
```c
// 发送命令到SD卡并获取R1响应
uint8_t sd_send_command(uint8_t cmd, uint32_t arg) {
uint8_t response;
// 发送命令代码、参数、校验等
// ...
// 等待并获取响应
response = spi_receive_data();
// 处理响应
// ...
return response;
}
```
SD卡的命令和响应机制是与SPI通信协议紧密相连的,需要确保在发送命令前,SD卡已经正确初始化,并且通信协议设置正确。在实际操作中,开发者需要参考SD卡的规范文档,以确保正确实现命令和响应的处理逻辑。
# 3. C语言环境下Micro SD卡的驱动开发
在深入探讨C语言如何与Micro SD卡进行通信之前,理解其驱动开发的架构和实现方式是至关重要的。本章节将详细介绍SD卡驱动的基本架构,文件系统与SD卡的交互,以及如何对驱动性能进行优化与测试。
## 3.1 SD卡驱动的基本架构
驱动程序的编写通常是一个复杂的工程,它需要与硬件紧密相连,同时提供软件层面的接口。SD卡驱动作为一类设备驱动,其基本架构包含以下几个方面。
### 3.1.1 驱动程序的模块划分
在设计驱动程序时,首先要考虑的是模块划分,以确保代码的可读性与可维护性。SD卡驱动通常可以划分为以下模块:
- 初始化模块:负责初始化硬件,设置相关参数,准备读写操作。
- 命令处理模块:处理上层发来的SD卡操作命令,并转换为实际的硬件操作。
- 数据传输模块:处理数据的读取和写入操作,与硬件直接交互。
- 中断处理模块:响应硬件中断,执行中断服务程序。
- 错误处理模块:处理异常情况,保证系统稳定运行。
以下是简化的SD卡驱动程序代码结构示例:
```c
/* SD Card Driver structure */
typedef struct {
init_func_t init;
command_func_t command;
read_func_t read;
write_func_t write;
interrupt_func_t interrupt;
error_func_t error;
} sd_driver_t;
/* Driver function prototypes */
void sd_init()
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入剖析 Micro SD 卡的 SPI 模式,为嵌入式系统开发者提供全面的指南。从基础概念到高级特性,本专栏涵盖了 Micro SD 卡 SPI 模式的方方面面,包括数据传输、优化、故障排除、硬件接口设计、Linux 驱动开发、加密技术、深层次应用、C 语言编程实现、IoT 设备集成、性能测试、跨平台编程差异、文件系统管理、硬件调试技巧和性能评估。通过深入浅出的讲解和丰富的示例,本专栏将帮助开发者掌握 Micro SD 卡 SPI 模式的精髓,提升嵌入式系统存储解决方案的性能、可靠性和安全性。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
HEC-RAS高级用户必学:模型校准技巧,确保模拟精准度

# 摘要
本文全面介绍了HEC-RAS模型的基本概念、数据输入要求、前期准备、校准技巧以及高级应用,并通过实际案例展示了模型的应用和校准的实践操作。文章首先概述了HEC-RAS模型的基本组成和校准基础,随后详述了数据输入、模型建立的准备工作和参数的设定。接着,深入探讨了HEC-RAS模型的校准流
【概念HDL与OrCAD元件库全面对比解析】:深入理解元件库差异,选择最合适的工具

# 摘要
本文旨在系统性地介绍并对比概念HDL与OrCAD两种流行的电子设计自动化工具中的元件库。文章首先介绍了元件库的基本概念、在电路设计流程中的作用以及HDL与OrCAD元件库的架构特点。接着,深入探讨了两者在数据结构、兼容性、可扩展性和用户体验方面的对比,并分析了实际
CMT2300性能优化终极手册:关键系统加速技术揭秘

# 摘要
随着信息技术的快速发展,性能优化已成为确保系统高效稳定运行的关键。本文从性能优化的理论基础出发,详细探讨了系统性能评估指标、瓶颈识别和优化模型。在硬件层面,本文重点分析了CPU、内存和I/O子系统的优化策略,并介绍了高级硬件加速技术。在软件层面,本文讨论了系统软件调优、应用程序的性能优化方法和数据库性能调优。通过CMT2300性能优化的实际案例,本文展示了性能监控、故障诊断以及持续性能优化策略的实际应用,旨
【DoIP车载诊断协议全解析】:从入门到精通的6个关键步骤

# 摘要
DoIP车载诊断协议是汽车电子领域中用于车辆诊断与通信的重要协议。本文首先概述了DoIP协议的基本概念,接着详细探讨了其基础知识点,包括数据结构、通信模型和关键概念。在此基础上,通过实践操作章节,本文提供了DoIP工具与软件的搭建方法以及消息交换流程,还介绍了故障诊断的实例和策略。在高级应用章节中,
多目标优化新境界:1stOpt 5.0技术精讲
# 摘要
多目标优化作为一种先进的数学规划方法,在工程应用中解决了诸多复杂问题的决策过程。本文概述了1stOpt 5.0软件的功能和核心算法,探讨了其在多目标优化问题中的应用原理及性能评估。通过软件操作实践的介绍,本文展示了1stOpt 5.0的实际应用,并通过具体案例分析了软件在工程问题求解中的优势。最后,本文展望了1stOpt 5.0的未来发展趋势,包括新版本的功能创新以及软件在不
博途TIA PORTAL V18数据管理大师:精通数据块与变量表
# 摘要
本文针对TIA Portal V18的数据管理进行了全面的探讨。首先介绍了数据块的种类和应用,深入分析了实例数据块(IDB)和全局数据块(GDB)的设计原则与使用场景,以及数据块的层次化组织和变量声明。接着,详细解析了变量表的作用、创建和配置方法,以及维护和优化策略。文章还分享了数据块和变量表在实际应用中的编程实践、管理实践和集成技巧,强调了数据备份与恢复机制,以及数据
直击3GPP 36.141核心:无线接入网络性能评估的终极指南

# 摘要
本文旨在全面解读3GPP 36.141核心标准,并探讨无线接入网络性能评估的基础理论与实践。文章首先概述了3GPP 36.141标准,强调了无线网络性能评估的重要性,并分析了无线信道的特性和评估方法。接着,通过实际案例对3GPP 36.141标准在性能评估中的应用进行了深入分析,涵盖了单用户性能、多用户性能以及网络覆盖的评估。文章还讨论了标准实施过程中的挑战,包括测试环境的搭建、数
【ANSA网格质量分析】:揭秘体网格质量保证的终极秘诀

# 摘要
ANSA软件作为先进的前处理工具,其在工程仿真中的应用尤为关键,特别是对网格质量的分析和优化。本文从理论基础出发,深入探讨了网格质量的重要性,包括不同类型网格的应用及其对模拟结果的影响,以及网格质量评估标准和其对仿真结果的具体影响。通过介绍ANSA网格质量分析工具的功能与操作,本文提供了网格质量改进的策略,并结合实际案例展示了如何应用ANSA进行高质量网格生成及问题网格的修复。最后,文章展望了高级网格质量
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )