从零到一:深入理解SPI模式及其在Micro SD卡中的应用(技术宝典)
发布时间: 2024-12-03 18:04:24 阅读量: 16 订阅数: 16 
参考资源链接:[Micro SD卡(TF卡)SPI模式操作详解](https://wenku.csdn.net/doc/6412b4cbbe7fbd1778d40d7a?spm=1055.2635.3001.10343)
# 1. SPI模式简介与工作原理
## SPI模式简介
SPI(Serial Peripheral Interface)是一种高速的,全双工,同步的通信接口,并且在电路中只需要四根线就可以完成通信,是一种非常常用的通信协议。SPI模式使用主从架构,允许多个从设备与一个主设备进行通信,广泛应用于微控制器和各种外围设备之间的数据交换。
## SPI的工作原理
SPI协议的核心由主设备上的四个基本信号线组成:SCLK(Serial Clock,串行时钟)、MOSI(Master Output Slave Input,主输出从输入)、MISO(Master Input Slave Output,主输入从输出)和SS(Slave Select,从设备选择)。主设备通过SCLK线提供时钟信号,控制数据的发送和接收,而数据通过MOSI和MISO线在主从设备之间传输。SS信号线用来选择和激活从设备,允许主设备与特定的从设备进行通信。
在工作过程中,主设备会通过MOSI线发送字节数据到从设备,同时从设备也会将数据通过MISO线传回给主设备,确保同步性。数据的传输以字节为单位,发送一个字节时,同时会接收一个字节。这种全双工机制使得数据传输效率更高。
通过以上架构,SPI提供了一种高效的数据交换方式,是嵌入式系统中常用的通信协议之一。接下来的章节我们将深入了解SPI的通信协议、Micro SD卡的工作原理以及在实际应用中的详细情况。
# 2. SPI通信协议详解
## 2.1 SPI协议基础
### 2.1.1 SPI通信框架
SPI(Serial Peripheral Interface)是一种高速的、全双工、同步的串行通信总线,由摩托罗拉在1980年代首先开发,广泛应用于微控制器和各种外围设备之间进行通信。一个典型的SPI通信框架包括四个主要的信号线:主设备上的MISO(Master In Slave Out,主设备数据输入,从设备数据输出)、MOSI(Master Out Slave In,主设备数据输出,从设备数据输入)、SCK(Serial Clock,串行时钟)、SS(Slave Select,从设备选择)。
SPI通信框架的核心是主从架构。一个SPI网络只能有一个主设备,但是可以有多个从设备,每个从设备都由主设备通过独立的SS线路选择进行通信。在数据通信过程中,主设备通过MOSI发送数据到从设备,同时通过MISO从从设备接收数据,这两个过程是同时进行的。
这里有一个简单的SPI通信框架的示意图:
```mermaid
flowchart LR
Master[主设备] -->|MOSI| Slave[从设备]
Slave -->|MISO| Master
Master -->|SCK| Slave
Master -->|SS| Slave
```
### 2.1.2 SPI信号线及其功能
- **MOSI(主出从入):** 主设备通过此信号线向从设备发送数据。
- **MISO(主入从出):** 从设备通过此信号线向主设备发送数据。
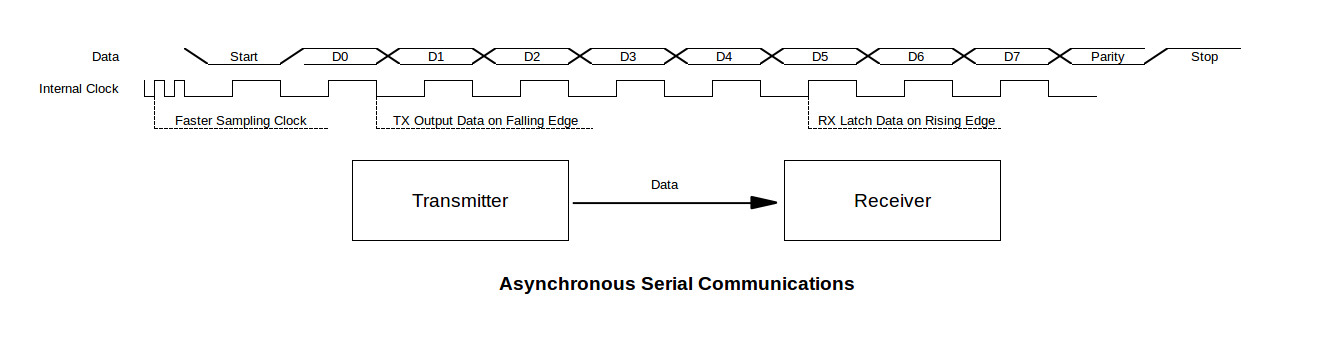
- **SCK(串行时钟):** 由主设备提供,用于同步数据传输。数据在时钟脉冲的上升沿或下降沿被采样,具体取决于时钟极性和相位配置。
- **SS(从设备选择):** 低电平有效,由主设备控制,用于选择哪一个从设备参与通信。当SS信号线处于高电平时,对应的从设备将不参与数据通信。
下面是一个表格,展示了SPI信号线及其具体功能:
| 信号线 | 功能 |
| --- | --- |
| MOSI | 主设备向从设备发送数据 |
| MISO | 从设备向主设备发送数据 |
| SCK | 同步数据传输的时钟信号 |
| SS | 从设备选择信号 |
## 2.2 SPI协议的数据传输机制
### 2.2.1 位传输与字节传输
在SPI协议中,数据传输可以是单个位的传输也可以是整个字节的传输。位传输模式通常用在设备初始化或者状态查询时,而字节传输则更为常见,用于发送和接收数据。
位传输的基本原则是,在SCK的每个时钟周期中,主设备通过MOSI发送一位数据给从设备,同时从设备也通过MISO向主设备发送一位数据。字节传输则是将8个位串行打包成一个字节,按顺序进行传输。
### 2.2.2 时钟极性和相位的配置
SPI时钟的极性和相位定义了数据采样的时钟边沿,这对数据的正确读取至关重要。时钟极性(CPOL)和时钟相位(CPHA)的配置有四种组合,通常用SPI模式0、1、2、3来表示。
下面是一个简单的表格,总结了四种SPI模式的配置:
| SPI模式 | CPOL(时钟极性) | CPHA(时钟相位) |
| --- | --- | --- |
| 模式0 | 0 | 0 |
| 模式1 | 0 | 1 |
| 模式2 | 1 | 0 |
| 模式3 | 1 | 1 |
每个模式下,数据采样发生在不同的时钟边沿。例如,在模式0下,时钟为低电平时,数据采样发生在上升沿(CPHA = 0),而数据输出发生在下降沿(CPHA = 1)。
### 2.2.3 数据传输速率的控制
数据传输速率是由主设备上的SCK信号线的频率决定的。SPI总线的传输速率一般在几十kbps到几Mbps之间,取决于硬件的支持。设置合理的速率可以保证数据传输的可靠性和设备的响应时间。数据传输速率的设置可以在主设备的初始化过程中配置,通常通过设置时钟分频器(Clock Prescaler)来实现。
例如,如果主设备的时钟源是8MHz,而我们希望SPI通信的时钟频率是1MHz,那么就需要设置分频器为8(8MHz / 1MHz)。
## 2.3 SPI的主机和从机架构
### 2.3.1 主从模式下的数据交换过程
在SPI协议中,主从模式的数据交换过程如下:
1. 主设备将SS线置为低电平,选择一个从设备进行通信。
2. 主设备产生时钟信号,并通过SCK线路传输给选定的从设备。
3. 主设备通过MOSI线路发送数据到从设备的同时,从设备通过MISO线路发送数据到主设备。
4. 数据传输完成,主设备将SS线置为高电平,结束与从设备的通信。
### 2.3.2 多从机通信管理
在多从机通信场景中,主设备会使用多个SS信号来控制不同的从设备。每增加一个从设备,就需要增加一根SS线路。在进行数据交换时,主设备只需要激活对应的SS线即可选择特定的从设备进行通信。
### 2.3.3 硬件和软件主从模式的对比
硬件主从模式指的是通过专门的硬件SPI接口进行通信,这种模式下,SPI的控制逻辑由硬件自动完成,减轻了CPU的负担,提高了数据传输的效率。
软件主从模式则是通过普通的GPIO(通用输入输出)口模拟SPI通信过程。这种方式在没有硬件SPI接口的微控制器上非常有用,但效率较低,且容易受CPU其他任务的影响。
## 2.4 SPI协议的优势与局限性
### 2.4.1 SPI与I2C等其他串行通信协议比较
SPI协议的主要优势在于:
- 高速数据传输
- 支持全双工通信
- 硬件实现简单
然而,与I2C等其他串行通信协议相比,SPI也有一些局限性:
- 单一主设备限制了网络的规模
- 多从设备管理复杂,需要较多的GPIO资源
- 无内置错误检测机制
### 2.4.2 SPI在各种应用场景中的优缺点
在嵌入式系统、音频和视频设备以及通信设备中,SPI协议因其简单和高效而被广泛应用。例如,在嵌入式系统中,SPI可以用来连接各种传感器和存储设备,实现实时数据采集和存储。
然而,在需要多主设备和复杂网络管理的场景下,SPI的局限性会变得较为明显。例如,I2C协议支持多主设备通信,并且内置了地址和冲突检测机制,更适合复杂的通信网络。
# 3. Micro SD卡技术规格和工作原理
## 3.1 Micro SD卡的结构与组成
### 3.1.1 物理层的构造与接口
Micro SD卡是一种微型存储卡,广泛应用于便携式电子设备中,如智能手机、数码相机、平板电脑以及嵌入式系统中。从物理层面来看,Micro SD卡体积小巧,其尺寸为15mm x 11mm x 1mm,拥有9个接触点。卡的制造采用了薄型的封装技术,以适应更多小型化的应用需求。
在物理层构造中,Micro SD卡通过金属接触点与外界通信,这些接触点包括电源(VCC)、地(GND)、数据线(DAT0, DAT1, DAT2, DAT3)、时钟线(CLK)、命令响应线(CMD)以及卡检测线(CD/DAT3)。这些线构成了基本的SP

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入剖析 Micro SD 卡的 SPI 模式,为嵌入式系统开发者提供全面的指南。从基础概念到高级特性,本专栏涵盖了 Micro SD 卡 SPI 模式的方方面面,包括数据传输、优化、故障排除、硬件接口设计、Linux 驱动开发、加密技术、深层次应用、C 语言编程实现、IoT 设备集成、性能测试、跨平台编程差异、文件系统管理、硬件调试技巧和性能评估。通过深入浅出的讲解和丰富的示例,本专栏将帮助开发者掌握 Micro SD 卡 SPI 模式的精髓,提升嵌入式系统存储解决方案的性能、可靠性和安全性。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
敏捷开发实践:揭秘顶尖团队如何用理论指导实战
参考资源链接:[吕云翔《软件工程-理论与实践》习题答案解析](https://wenku.csdn.net/doc/814p2mg9qb?spm=1055.2635.3001.10343)
# 1. 敏捷开发的核心理念与框架
敏捷开发是一种强调适应性和迭代进步的软件开发方法论,它鼓励快速响应变化,持续交付有价值的产品增量。核心在于人与交互、可工作的软件、客户合作以及对变化的灵活响应。敏捷开发的框架多种多样,其
状态机与控制单元:Logisim实验复杂数据操作管理
参考资源链接:[Logisim实验教程:海明编码与解码技术解析](https://wenku.csdn.net/doc/58sgw98wd0?spm=1055.2635.3001.10343)
# 1. 状态机与控制单元的理论基础
状态机是一种计算模型,它能够通过一系列状态和在这些状态之间的转移来表示对象的行为。它是控制单元设计的核心理论之一,用于处理各种
Trace Pro 3.0 优化策略:提高光学系统性能和效率的专家建议
参考资源链接:[TracePro 3.0 中文使用手册:光学分析与光线追迹](https://wenku.csdn.net/doc/1nx4bpuo99?spm=1055.2635.3001.10343)
# 1. Trace Pro 3.0 简介与基础
## 1.1 Trace Pro 3.0 概述
Trace Pro 3.
【光刻技术的未来】:从传统到EUV的技术演进与应用
参考资源链接:[Fundamentals of Microelectronics [Behzad Razavi]习题解答](https://wenku.csdn.net/doc/6412b499be7fbd1778d40270?spm=1055.2635.3001.10343)
# 1. 光刻技术概述
## 1.1 光刻技术简介
光刻技术是半导体制造中不可或缺的工艺,它使用光学或电子束来在硅片表面精确地复
【中兴光猫配置文件加密解密工具的故障排除】:解决常见问题的5大策略
参考资源链接:[中兴光猫cfg文件加密解密工具ctce8_cfg_tool使用指南](https://wenku.csdn.net/doc/obihrdayhx?spm=1055.2635.3001.10343)
# 1. 光猫配置文件加密解密概述
随着网络技术的快速发展,光猫设备在数据通信中的角色愈发重要。配置文件的安全性成为网络运营的焦点之一。本章将对光猫配置文件的加密与解密技术进行概述,为后续的故障排查和优化策略打下基础。
## 1.1 加密解密技术的重要性
加密解密技术是确保光猫设备配置文件安全的核心。通过数据加密,可以有效防止敏感信息泄露,保障网络通信的安全性和数据的完整性。本
MT7981芯片架构深度剖析:从硬件设计到软件优化的10大技巧

参考资源链接:[MT7981数据手册:专为WiFi AP路由器设计的最新规格](https://wenku.csdn.net/doc/7k8yyvk5et?spm=1055.2635.3001.10343)
# 1. MT7981芯片架构概述
MT7981芯片作为市场上的新兴力量,其架构在设计之初便聚焦于性能与能
数字电路设计自动化与智能化:未来趋势与实践路径

参考资源链接:[John F.Wakerly《数字设计原理与实践》第四版课后答案汇总](https://wenku.csdn.net/doc/7bj643bmz0?spm=1055.2635.3001.10343)
# 1. 数字电路设计自动化与智能化概述
数字电路设计自动化与智能化是现代电子设计领域的两大重要趋势,它们极大地提升了设计效
【HOLLiAS MACS V6.5.2数据采集与分析】:实时数据驱动决策的力量
参考资源链接:[HOLLiAS MACS V6.5.2用户操作手册:2013版权,全面指南](https://wenku.csdn.net/doc/6412b6bfbe7fbd1778d47d3b?spm=1055.2635.3001.10343)
# 1. HOLLiAS MACS V6.5.2概述及
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )