图论导引习题解答:15个技巧让你从新手变成专家
发布时间: 2024-12-14 20:32:43 阅读量: 8 订阅数: 7 

图论导引习题答案 Introduction to Graph Theory solution manual 第二版
参考资源链接:[图论导引第二版习题解答Douglas B. West](https://wenku.csdn.net/doc/6412b50dbe7fbd1778d41c4d?spm=1055.2635.3001.10343)
# 1. 图论基础与核心概念
图论是计算机科学与数学领域中的一个重要分支,它主要研究的是图的性质,以及图在各种科学与技术中的应用。图可以简单理解为由顶点(或称为节点)和连接这些顶点的边组成的一种数据结构。图论中的核心概念包括但不限于:图、子图、路径、环、连通性和连通分量、树、森林、图的遍历算法等。
图论是解决复杂问题的一个强有力的工具。通过图,我们可以将各种问题抽象成图模型,然后用图论的理论和算法来解决。例如,在社交网络中,我们可以用图来表示用户之间的关系,研究信息的传播方式和社区结构;在交通规划中,我们可以用图来表示道路网络,求解最短路径和最优路线。
图论的研究不仅需要数学的严谨性和深度,也需要计算机科学的抽象思维和算法设计能力。只有对图论的基础知识有深入的理解,才能在实际问题中灵活运用图论的理论与算法,解决复杂的问题。
# 2. 图论问题的数学建模
### 2.1 图的表示方法
在图论中,图的表示方法主要有两种:邻接矩阵和邻接表。这两种方法各有优劣,适用于不同的场景。
#### 2.1.1 邻接矩阵
邻接矩阵是一个二维数组,其大小为n×n,n为图中顶点的数量。如果顶点i和顶点j之间存在一条边,则邻接矩阵的第i行第j列的元素为1,否则为0。在无向图中,邻接矩阵是对称的,而在有向图中则不一定。
**代码块示例:**
```python
# Python 代码展示邻接矩阵的创建
def create_adjacency_matrix(graph):
n = len(graph['vertices']) # 获取顶点数量
adjacency_matrix = [[0] * n for _ in range(n)] # 初始化邻接矩阵
for edge in graph['edges']:
# 无向图,需要添加两条边
adjacency_matrix[edge[0]][edge[1]] = 1
adjacency_matrix[edge[1]][edge[0]] = 1
return adjacency_matrix
# 图的表示示例
graph = {
'vertices': ['A', 'B', 'C', 'D'],
'edges': [(0, 1), (0, 2), (1, 2), (2, 3)]
}
adjacency_matrix = create_adjacency_matrix(graph)
print(adjacency_matrix)
```
**参数说明和逻辑分析:**
在这个函数中,我们首先获取了图中顶点的数量n,然后初始化一个n×n的二维数组,所有元素都初始化为0。接着,遍历图中所有边的信息,并更新邻接矩阵。由于是无向图,每条边在邻接矩阵中需要添加两次。
**表格展示:**
| 顶点 | A | B | C | D |
|------|-----|-----|-----|-----|
| A | 0 | 1 | 1 | 0 |
| B | 1 | 0 | 1 | 0 |
| C | 1 | 1 | 0 | 1 |
| D | 0 | 0 | 1 | 0 |
邻接矩阵的实现简单直观,但是在稠密图中会占用较多空间。
#### 2.1.2 邻接表
邻接表使用一个数组来存储所有顶点,每个顶点又对应一个链表,链表中存储与该顶点相邻的其他顶点。邻接表更加节省空间,特别是在稀疏图中。
**代码块示例:**
```python
# Python 代码展示邻接表的创建
def create_adjacency_list(graph):
adjacency_list = {i: [] for i in range(len(graph['vertices']))}
for edge in graph['edges']:
# 无向图,添加两条边
adjacency_list[edge[0]].append(edge[1])
adjacency_list[edge[1]].append(edge[0])
return adjacency_list
# 使用上一个示例的图
adjacency_list = create_adjacency_list(graph)
print(adjacency_list)
```
**参数说明和逻辑分析:**
这段代码中,我们首先创建了一个字典,键是顶点的索引,值是空列表。然后,遍历图的边信息,将相邻的顶点添加到对应顶点的链表中。在无向图的情况下,我们需要添加两条边的信息。
**表格展示:**
| 顶点 | 相邻顶点 |
|------|----------|
| A | B, C |
| B | A, C |
| C | A, B, D |
| D | C |
邻接表在稀疏图中更加高效,因为它只存储实际的边信息,不需要为不存在的边保留空间。
### 2.2 图的基本类型
#### 2.2.1 有向图与无向图
有向图和无向图是图的两种基本形式。在无向图中,边是没有方向的,即顶点A到顶点B的边等同于顶点B到顶点A的边。而在有向图中,边是单向的,即顶点A到顶点B的边不等于顶点B到顶点A的边。
**mermaid流程图展示:**
```mermaid
graph LR
A -->|无向边| B
C -->|有向边| D
```
在该流程图中,A到B的边是无向的,表示可以双向通行,而C到D的边是有向的,表示只能从C到D通行。
#### 2.2.2 加权图与非加权图
在加权图中,每条边都有一段权重,通常用来表示距离、成本、时间等。非加权图的边没有权重,只表示顶点之间存在连接。
**代码块示例:**
```python
# Python 代码展示加权图和非加权图的创建
def create_weighted_graph():
graph = {'vertices': ['A', 'B', 'C'], 'edges': [('A', 'B', 1), ('B', 'C', 2)]}
return graph
def create_unweighted_graph():
graph = {'vertices': ['A', 'B', 'C'], 'edges': [('A', 'B'), ('B', 'C')]}
return graph
weighted_graph = create_weighted_graph()
unweighted_graph = create_unweighted_graph()
print("加权图:", weighted_graph)
print("非加权图:", unweighted_graph)
```
### 2.3 图的遍历算法
图的遍历算法主要有深度优先搜索(DFS)和广度优先搜索(BFS),它们用于遍历或搜索图的节点。
#### 2.3.1 深度优先搜索(DFS)
深度优先搜索(DFS)是一种用于遍历或搜索树或图的算法。该算法沿着图的边走尽可能深,直到到达末端,然后回溯。
**代码块示例:**
```python
# Python 代码展示DFS算法
def DFS(graph, start, visited=None):
if visited is None:
visited = set()
visited.add(start)
print(start, end=' ')
for next in graph[start] - visited:
DFS(graph, next, visited)
return visited
# 示例图结构
graph = {'A': {'B', 'C'}, 'B': {'A', 'D', 'E'}, 'C': {'A', 'F'}, 'D': {'B'}, 'E': {'B', 'F'}, 'F': {'C', 'E'}}
DFS(graph, 'A')
```
**参数说明和逻辑分析:**
在这个DFS函数中,我们首先检查当前顶点是否被访问过,如果没有,则将其添加到访问集合中,并打印顶点的标识符。然后递归地对所有未访问的邻接顶点执行DFS。
#### 2.3.2 广度优先搜索(BFS)
广度优先搜索(BFS)是一种用于遍历或搜索树或图的算法。它从根节点开始,逐层遍历图的所有节点。
**代码块示例:**
```python
# Python 代码展示BFS算法
from collections import deque
def BFS(graph, start):
visited = set()
queue = deque([start])
while queue:
vertex = queue.popleft()
if vertex not in visited:
print(vertex, end=' ')
visited.add(vertex)
queue.extend(graph[vertex] - visited)
return visited
BFS(graph, 'A')
```
**参数说明和逻辑分析:**
这里使用队列来跟踪下一层的节点,从队列中取出一个节点后,就将其添加到已访问集合,并将其未访问的邻接点加入队列。这样可以保证先访问的节点先出队列,实现广度优先。
DFS和BFS在不同场景下有不同的应用。例如,DFS适用于深度优先遍历树或图,BFS适用于找到两点之间的最短路径或检测图的连通性。
# 3. 图论算法实战技巧
图论算法实战技巧章节关注于如何将图论基础应用于解决实际问题,涵盖了最短路径、最小生成树和网络流问题的经典算法及其应用场景。
## 3.1 最短路径问题
在众多图论问题中,寻找最短路径是最为常见的问题之一,它广泛应用于网络路由、物流规划等众多领域。
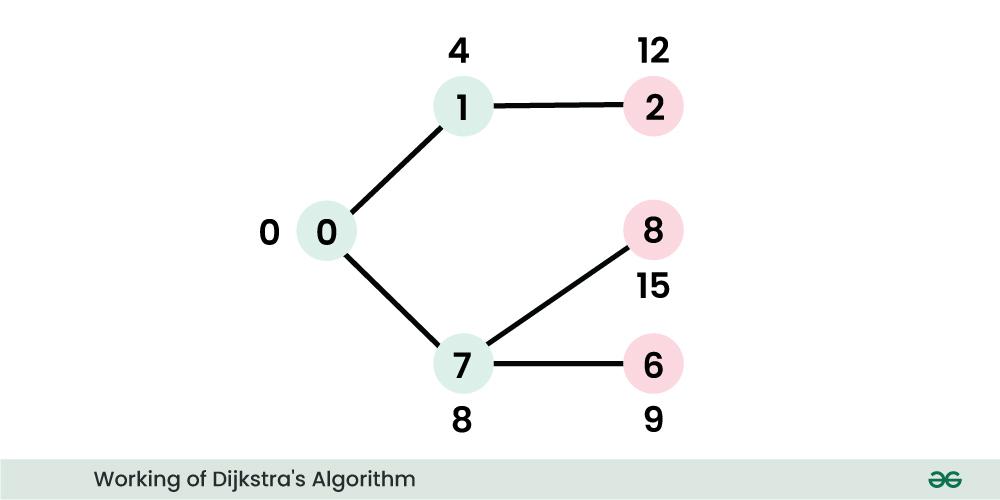
### 3.1.1 Dijkstra算法
Dijkstra算法由荷兰计算机科学家Edsger W. Dijkstra在1956年提出,用于在加权图中找到最短路径。该算法适用于有向和无向图,但所有边的权重必须为正数。
#### 代码实现
下面是用Python实现的Dijkstra算法示例代码:
```python
import heapq
def dijkstra(graph, start):
distances = {vertex: float('infinity') for vertex in graph}
distances[start] = 0
priority_queue = [(0, start)]
while priority_queue:
current_distance, current_vertex = heapq.heappop(priority_queue)
if current_distance > distances[current_vertex]:
continue
for neighbor, weight in graph[current_vertex].items():
distance = current_distance + weight
if distance < distances[neighbor]:
distances[neighbor] = distance
heapq.heappush(priority_queue, (distance, neighbor))
return distances
```
#### 参数说明与逻辑分析
上述代码首先为图中的每个节点创建一个距离字典,并将起始节点的距离设置为0,其余节点设置为无穷大。然后使用一个优先队列(最小堆)来选择距离最小的节点进行处理。
在执行过程中,对于当前节点的每一个邻居,计算从起始节点经过当前节点到达该邻居节点的距离。如果这个距离小于已知的到达该节点的距离,则更新这个距离,并将其加入优先队列。
该算法的时间复杂度为O((V+E)logV),其中V是顶点数,E是边数。
### 3.1.2 Floyd-Warshall算法
Floyd-Warshall算法是另一种解决最短路径问题的动态规划算法,它能解决包含负权边的图的最短路径问题,并且能够计算任意两点之间的所有节点对最短路径。
#### 代码实现
以下为Floyd-Warshall算法的Python代码示例:
```python
def floyd_warshall(graph):
distance = {i: {j: float('infinity') for j in graph} for i in graph}
for i in graph:
distance[i][i] = 0
for k in graph:
for i in graph:
for j in graph:
if i != j and i != k and j != k and distance[i][k] + distance[k][j] < distance[i][j]:
distance[i][j] = distance[i][k] + distance[k][j]
return distance
```
#### 参数说明与逻辑分析
此代码创建了一个距离矩阵,初始化时将所有节点对之间的距离设为无穷大,节点到自身的距离设为0。然后通过三重循环更新距离矩阵中每对节点之间的最短路径。时间复杂度为O(V^3)。
## 3.2 最小生成树
最小生成树是图论中的另一个重要概念,它指的是在一个加权连通图中找到一个边的子集,使得这个子集构成的树包含图中所有的顶点,并且边的权重和最小。
### 3.2.1 Prim算法
Prim算法是由Vojtěch Jarník和Robert C. Prim分别独立发现的。它从任意一个顶点开始,逐步增加边和顶点,直到包含所有顶点为止。
#### 代码实现
下面是一个Prim算法的Python实现代码:
```python
import heapq
def prim(graph):
mst = set()
edges = [(cost, start, end) for start, adj in graph.items() for end, cost in adj.items()]
heapq.heapify(edges)
visited = set([next(iter(graph))])
while edges:
cost, start, end = heapq.heappop(edges)
if end not in visited:
mst.add((start, end))
visited.add(end)
for next_end, next_cost in graph[end].items():
if next_end not in visited:
heapq.heappush(edges, (next_cost, end, next_end))
return mst
```
#### 参数说明与逻辑分析
该代码使用一个最小堆来存储图中所有可能的边,并首先将起始顶点的所有边加入最小堆。接着,每次从堆中取出最小的边,并将该边的终点加入生成树,重复此过程,直到包含所有顶点。
### 3.2.2 Kruskal算法
Kruskal算法通过选取边集合中权重最小的边,保证它们不构成环,直到选取的边的数目为顶点数减一。
#### 代码实现
下面的Python代码展示了如何实现Kruskal算法:
```python
class DisjointSet:
def __init__(self, size):
self.parent = [i for i in range(size)]
self.rank = [0] * size
def find(self, node):
if self.parent[node] != node:
self.parent[node] = self.find(self.parent[node])
return self.parent[node]
def union(self, node1, node2):
root1 = self.find(node1)
root2 = self.find(node2)
if root1 != root2:
if self.rank[root1] > self.rank[root2]:
self.parent[root2] = root1
elif self.rank[root1] < self.rank[root2]:
self.parent[root1] = root2
else:
self.parent[root2] = root1
self.rank[root1] += 1
return True
return False
def kruskal(graph):
edges = sorted([(cost, start, end) for start, adj in graph.items() for end, cost in adj.items()])
ds = DisjointSet(len(graph))
mst = []
for cost, start, end in edges:
if ds.union(start, end):
mst.append((start, end, cost))
return mst
```
#### 参数说明与逻辑分析
Kruskal算法使用了一个称为“不相交集合”的数据结构来检测添加一条边是否会形成一个环。算法首先将所有的边按权重从低到高排序,然后从权重最小的边开始,检查这条边的两个顶点是否已经在同一个连通分量中,如果不是,则将这条边添加到最小生成树中。
## 3.3 网络流问题
网络流问题是指在一个网络中,如何以最大效率地从源点向汇点输送资源。此类问题在物流、通信网络等领域有着广泛的应用。
### 3.3.1 Ford-Fulkerson方法
Ford-Fulkerson方法是解决网络流问题的一种基础算法,它通过不断寻找增广路径来增加流量,直到无法找到增广路径为止。
#### 代码实现
下面是一个Ford-Fulkerson方法的Python代码示例:
```python
from collections import defaultdict
def bfs(rGraph, s, t, parent):
visited = [False] * len(rGraph)
queue = []
queue.append(s)
visited[s] = True
while queue:
u = queue.pop(0)
for ind, val in enumerate(rGraph[u]):
if visited[ind] == False and val > 0:
queue.append(ind)
visited[ind] = True
parent[ind] = u
return visited[t]
def ford_fulkerson(graph, source, sink):
rGraph = [row[:] for row in graph]
parent = [-1] * len(graph)
max_flow = 0
while bfs(rGraph, source, sink, parent):
path_flow = float('inf')
s = sink
while(s != source):
path_flow = min(path_flow, rGraph[parent[s]][s])
s = parent[s]
max_flow += path_flow
v = sink
while(v != source):
u = parent[v]
rGraph[u][v] -= path_flow
rGraph[v][u] += path_flow
v = parent[v]
return max_flow
```
#### 参数说明与逻辑分析
代码中首先创建了一个剩余网络`rGraph`,该网络用于记录每条边的剩余容量。接着使用BFS查找是否存在从源点到汇点的路径。一旦找到路径,则通过这条路径推送尽可能多的流量,并更新剩余网络。
### 3.3.2 Dinic算法
Dinic算法是另一种高效的网络流算法,它通过构建层次图和寻找阻塞流来提高效率,常用于实际问题中。
#### 代码实现
以下为Dinic算法的一个简化Python示例:
```python
from collections import deque
def bfs(rGraph, s, t, level):
level[:] = [-1] * len(rGraph)
queue = deque()
queue.append(s)
level[s] = 0
while queue:
u = queue.popleft()
for v in range(len(rGraph)):
if level[v] == -1 and rGraph[u][v] > 0:
level[v] = level[u] + 1
queue.append(v)
if v == t:
return True
return False
def dinic(graph, source, sink):
rGraph = [row[:] for row in graph]
max_flow = 0
while True:
level = [0] * len(graph)
if not bfs(rGraph, source, sink, level):
break
while True:
path_flow = float('inf')
v = sink
while(v != source):
u = path[level[v]][v]
path_flow = min(path_flow, rGraph[u][v])
v = path[level[v]][v]
max_flow += path_flow
v = sink
while(v != source):
u = path[level[v]][v]
rGraph[u][v] -= path_flow
rGraph[v][u] += path_flow
v = path[level[v]][v]
return max_flow
```
#### 参数说明与逻辑分析
Dinic算法中的关键步骤是构建层次图,通过BFS遍历确定所有顶点到汇点的层次。之后,在层次图上寻找阻塞流,这是一种使得源点到汇点的流量不能再增加的流量配置。
在实际操作中,Dinic算法相比于Ford-Fulkerson方法通常具有更好的性能,特别是在网络流问题规模较大时。
以上所述内容为本章节的核心部分,旨在深入探讨图论算法在实际问题中的应用。下一节我们将继续探讨图论算法的优化策略,敬请期待。
# 4. 图论算法优化策略
## 4.1 时间复杂度分析
### 4.1.1 算法效率的关键考量
在图论算法中,时间复杂度衡量的是算法执行所需要的时间与输入数据规模之间的关系。优化图论算法的首要任务是分析算法的时间复杂度,并找到提升效率的关键点。例如,Dijkstra算法的时间复杂度在朴素实现下为O(V^2),如果使用优先队列则可以降低至O((V+E)logV),其中V是顶点数,E是边数。
```mermaid
graph LR
A[图论问题] -->|分析| B[算法选择]
B -->|效率考量| C[时间复杂度]
C --> D[优化算法]
D --> E[提升效率]
```
通过优化数据结构和算法实现,我们能够显著提高算法效率。例如,如果一个算法在处理稠密图时效率低下,那么通过选择合适的数据结构(如邻接矩阵)可能会有性能提升。
### 4.1.2 优化技巧与数据结构的选择
优化图论算法时,合理选择数据结构至关重要。邻接矩阵适用于边数接近顶点数平方的稠密图,而邻接表则更适合稀疏图。以下是一个使用邻接表实现的图表示:
```python
class Graph:
def __init__(self, vertices):
self.V = vertices
self.graph = [[] for _ in range(vertices)]
def add_edge(self, u, v):
self.graph[u].append(v)
self.graph[v].append(u) # 无向图
```
在优化算法时,应当考虑是否能减少不必要的计算。例如,在寻找最短路径时,已找到的最短路径不需要再次更新,这可以通过使用斐波那契堆等优先队列数据结构来优化。
## 4.2 空间复杂度优化
### 4.2.1 压缩数据结构的使用
在处理大规模图数据时,空间复杂度成为了一个关键瓶颈。使用压缩数据结构能够显著降低存储需求。例如,邻接表可以只存储存在的边,跳过不存在的边的存储。
```python
def print_graph(graph):
for u, edges in enumerate(graph.graph):
for v in edges:
print(f"{u} -> {v}")
```
通过只存储有效信息,我们可以大幅度减少内存占用。在特定情况下,使用位图(bitmaps)或位向量(bit vectors)可以进一步压缩数据。
### 4.2.2 动态内存管理
动态内存管理对于处理大型图数据集至关重要。适时释放不再需要的内存可以避免内存泄漏,并且能够为其他程序提供可用的内存资源。在编程实现中,应当注意及时回收内存。
```python
class Graph:
# ... 其他部分代码
def __del__(self):
del self.graph
```
在Python中,垃圾回收机制可以自动处理不再使用的内存,但在其他语言中,如C++,开发者需要手动管理内存。动态内存管理策略如引用计数、内存池等能够有效地管理内存使用。
## 4.3 并行与分布式图处理
### 4.3.1 并行算法的基本原理
随着多核处理器的普及,将算法并行化是提高图论算法效率的有效方式。并行算法的基本原理是将大任务分解为小任务,然后在多个处理单元上并行执行,最后合并结果。
```mermaid
graph TD
A[图论问题] --> B[任务分解]
B --> C[并行执行]
C --> D[结果合并]
D --> E[算法完成]
```
例如,在并行处理最短路径问题时,可以将图的顶点分割成多个子集,每个子集的最短路径可以在不同的处理核心上并行计算。
### 4.3.2 分布式图计算框架介绍
对于大规模图数据,分布式图计算框架如Google的Pregel、Apache的Giraph和GraphX提供了扩展算法处理能力的方式。这些框架能够在多台机器上分配图数据和计算负载,显著提高处理能力。
```mermaid
graph LR
A[图论问题] -->|数据分割| B[多个节点]
B -->|并行计算| C[处理单元]
C -->|结果合并| D[全局图状态]
```
在这些框架中,图被分割为小块,每个节点处理一部分图数据,最终通过网络通信合并结果。例如,GraphX框架在Spark的基础上提供了图处理的能力,并支持图的并行迭代计算。
# 5. 图论高级应用案例分析
## 5.1 社交网络分析
### 5.1.1 社区发现算法
社区发现是社交网络分析中的一个重要问题,其目标是在复杂的社交网络中发现具有密集连接的节点组,这些节点组在社交网络中形成紧密的社区。有效的社区发现算法可以帮助我们理解社交网络的结构,揭示群体之间的互动模式。
社区发现算法的核心思想是将网络中的节点划分为多个社区,使得社区内部的节点间连接比社区间的连接更密集。一种常用的社区发现算法是基于模块度优化的算法。模块度是衡量网络划分好坏的一个指标,高模块度意味着网络中有更多的内部连接和较少的外部连接。
例如,Girvan-Newman算法就是一种广泛使用的社区发现算法。该算法使用边介数(edge betweenness)的概念,边介数是指网络中所有最短路径中经过某条边的路径数量。通过不断移除网络中边介数最高的边,并重新计算剩余网络的边介数,最后根据网络分裂情况确定社区划分。
```python
import networkx as nx
import matplotlib.pyplot as plt
# 创建一个图
G = nx.karate_club_graph()
# 使用Girvan-Newman算法
community_generator = nx.community.girvan_newman(G)
for communities in itertools.islice(community_generator, 4):
# 节点分配到社区
partition = {node: community for community, nodes in enumerate(communities) for node in nodes}
plt.figure(figsize=(8, 8))
pos = nx.spring_layout(G)
nx.draw_networkx_nodes(G, pos, partition.keys(), node_size=40,
cmap=plt.cm.rainbow, node_color=list(partition.values()))
nx.draw_networkx_edges(G, pos, alpha=0.5)
plt.title("Community Detection using Girvan-Newman Algorithm")
plt.show()
```
在这个示例中,我们使用了Python的NetworkX库来实现Girvan-Newman算法,并可视化了社区的发现过程。通过算法迭代,我们能够观察到社区是如何逐渐分离的。
社区发现算法不仅限于Girvan-Newman,还有诸如Louvain方法、谱聚类算法等其他高效的社区发现算法。选择合适的方法需要根据社交网络的具体特性,比如网络规模、网络密度、社区大小分布等因素来决定。
### 5.1.2 影响力最大化问题
在社交网络分析中,影响力最大化问题(Influence Maximization)指的是如何识别出一群能够最大程度影响整个网络的个体。这个问题在病毒式营销、信息传播控制等领域有着广泛的应用。
影响力最大化问题可以用图论来建模,其中节点代表个体,边代表个体之间的社交关系。影响力的传播可以通过传播模型来模拟,如独立级联模型(IC model)和线性阈值模型(LT model)。
为了求解影响力最大化问题,可以采用启发式算法。一种著名的算法是由Kempe等人提出的模拟退火启发式算法。该算法的基本思想是通过选择和激活节点集合来模拟影响力传播,并使用贪心策略来逐步增加影响力。
```python
import networkx as nx
import random
def independent_cascade_model(G, seed_set, t=0.1):
"""
独立级联模型实现
:param G: 网络图
:param seed_set: 初始激活节点集合
:param t: 概率阈值
:return: 最终激活节点集合
"""
activated = seed_set.copy()
new_activated = set(seed_set)
while new_activated:
next_activated = set()
for node in new_activated:
for neighbor in nx.all_neighbors(G, node):
if neighbor not in activated and random.random() < t:
next_activated.add(neighbor)
activated.update(new_activated)
new_activated = next_activated
return activated
# 创建一个图并应用独立级联模型
G = nx.erdos_renyi_graph(100, 0.1)
initial_seed_set = {random.choice(list(G.nodes()))}
activated_set = independent_cascade_model(G, initial_seed_set)
print(f"Activated nodes: {activated_set}")
```
在上面的代码示例中,我们使用了独立级联模型来模拟影响力如何在社交网络中传播。首先,我们选择了一个随机的种子节点集合,然后模拟了影响力传播的过程,并打印出最终被激活的节点集合。
影响力最大化问题是一个NP难问题,因此通常采用近似算法和启发式方法来寻找有效的解决方案。随着社会媒体和在线社交网络的兴起,这个问题及其解决方案在现实世界中有着越来越重要的应用价值。
## 5.2 路网分析与规划
### 5.2.1 城市交通规划的图论模型
城市交通网络是图论应用中的一个经典领域。城市中的道路可以视为图的边,交叉口或路段可以看作是图中的节点。图论为我们提供了一种模型化和优化城市交通网络的方法。
在城市交通规划中,最常见的图论模型包括最短路径问题、最大流量问题和最小生成树等。通过这些模型,可以解决如交通拥堵分析、路线优化、交通流量控制等问题。例如,Dijkstra算法和A*算法常被用于寻找两点之间的最短路径,这对于优化交通流,减少行车时间至关重要。
```python
from heapq import heappop, heappush
def dijkstra(graph, start):
distances = {vertex: float('infinity') for vertex in graph}
distances[start] = 0
priority_queue = [(0, start)]
while priority_queue:
current_distance, current_vertex = heappop(priority_queue)
if current_distance > distances[current_vertex]:
continue
for neighbor, weight in graph[current_vertex].items():
distance = current_distance + weight
if distance < distances[neighbor]:
distances[neighbor] = distance
heappush(priority_queue, (distance, neighbor))
return distances
# 创建一个加权图
G = {
'A': {'B': 1, 'C': 4},
'B': {'A': 1, 'C': 2, 'D': 5},
'C': {'A': 4, 'B': 2, 'D': 1},
'D': {'B': 5, 'C': 1}
}
print(dijkstra(G, 'A'))
```
在这个例子中,我们使用Dijkstra算法来计算图中的最短路径。这是处理城市交通网络中路线规划问题的常用方法。根据实际需求,我们还可以对算法进行调整以适应不同的场景和条件。
### 5.2.2 网络延迟与可靠性分析
网络延迟和可靠性是衡量交通网络性能的两个重要指标。在网络中,延迟是指从网络的一个节点到另一个节点的旅行时间。可靠性通常指网络在面对某些节点或边失效时,保持其连通性和效率的能力。
在城市交通网络中,我们可以使用图论中的概念来分析网络延迟。例如,我们可以使用加权图来表示有不同速度限制或交通状况的道路,并计算在特定条件下从起点到终点的预期延迟时间。
为了分析网络的可靠性,我们可以通过移除网络中的节点和边来模拟潜在的故障,并分析网络的连通性是否保持。K端点连通性分析(k-edge or k-vertex connectivity)是衡量网络可靠性的一种方法。
```python
import networkx as nx
import random
def network_reliability(G):
"""
计算网络的可靠性
:param G: 网络图
:return: 网络的可靠性
"""
# 随机移除边来模拟故障
k = len(G.nodes()) - 1
while k > 0:
edges = list(G.edges())
u, v = random.choice(edges)
G.remove_edge(u, v)
k -= 1
# 检查网络是否仍然连通
if nx.is_connected(G):
return 1
else:
return 0
# 创建一个随机图
G = nx.gnm_random_graph(10, 20)
print(f"Network Reliability: {network_reliability(G)}")
```
在这个示例中,我们使用Python的NetworkX库来模拟一个网络的可靠性分析。通过移除边来模拟网络可能的故障,并检查网络是否仍然保持连通。这个简单的模拟可以为我们提供关于网络稳定性的基本见解。
城市交通规划是一个涉及多方面因素的复杂问题。图论的应用不仅限于传统的交通网络分析,还可以通过结合地理信息系统(GIS)、大数据分析和机器学习技术来实现更加智能化的交通管理与规划。随着技术的发展,这些方法在提高城市交通效率、降低拥堵、提升出行体验方面发挥着越来越重要的作用。
# 6. 图论习题解题技巧提升
在图论学习的过程中,通过大量的习题练习来巩固理论知识和提升解题技巧是至关重要的。本章节将详细探讨如何理解题意、构建模型、掌握常见题型的解答模板以及规避常见误区,帮助读者在图论习题解题方面取得显著提升。
## 6.1 理解题意与构建模型
### 6.1.1 题目分析
在解题前,首先应仔细阅读题目,明确题目的要求,理解所给的图的类型以及需要解决的问题。比如是求最短路径、最小生成树还是进行网络流分析等。分析题目时,还需要识别图中的特殊结构和限制条件,如是否存在环、是否有向、是否加权等。理解题目的每一个细节,对于准确构建数学模型至关重要。
### 6.1.2 模型构建步骤
构建数学模型通常包括以下几个步骤:
1. **定义图的结构**:明确图是有向还是无向,是否加权,以及权重的范围和性质等。
2. **确定节点和边的关系**:根据题意分析图中节点和边的关系,特别是如果题中有特殊节点或特殊边,如起点、终点、桥、割边等。
3. **设定目标函数**:如果是优化问题,需要确定目标函数及其约束条件。
4. **转化实际问题到图论问题**:根据实际问题的特点,将问题转化为图论中的标准问题。
## 6.2 常见题型解答模板
### 6.2.1 模板的重要性与应用
模板是解决特定类型图论问题的通用方法,它能够帮助我们快速地应用已经验证过的解法框架,提高解题效率。对于常见的图论问题,如最短路径、最小生成树、网络流等,掌握其解题模板是解题过程中的加速器。
### 6.2.2 模板的灵活运用与调整
尽管模板提供了通用的解决方案,但在具体应用时,还需根据题目的具体情况灵活调整。例如,在使用Dijkstra算法求最短路径时,如果遇到负权边,就需要改用Bellman-Ford算法。模板的运用不是僵化的,它需要与实际题目相结合,进行必要的调整。
## 6.3 高分技巧与误区警示
### 6.3.1 答题策略与技巧
在解答图论习题时,可以采取以下策略和技巧:
- **从简单到复杂**:先从简单的图结构开始分析,逐步增加复杂度。
- **分而治之**:将大问题分解为若干小问题,分别解决后再进行综合。
- **反证法**:在某些问题中,反证可能比直接证明更容易找到答案。
- **特殊情况分析**:分析一些特殊情况,有助于理解问题本质,有时也可以通过特殊情况推导出一般规律。
### 6.3.2 常见错误类型及预防
在解图论问题时,常见的错误类型包括:
- **模型构建错误**:对题目理解不准确导致模型构建错误。
- **算法选择不当**:没有根据题目的特殊性选择合适的算法。
- **编码错误**:在编程实现算法时,由于对算法逻辑理解不透彻导致的代码错误。
- **时间或空间资源使用不当**:未考虑算法的时间复杂度和空间复杂度,导致程序运行效率低下。
为了避免这些常见错误,解题时应:
- **仔细审题**,确保对题目的要求有深刻理解。
- **选择合适算法**,并理解其优缺点及适用场景。
- **代码编写前先梳理逻辑**,确保算法思想清晰后再开始编码。
- **优化代码结构**,提升算法效率,合理分配时间与空间资源。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏提供全面的图论指南,涵盖从基础概念到高级算法的各个方面。通过深入探讨图论问题,它提供了 15 个技巧、5 大策略、6 个实战案例和 3 大关键技术,帮助初学者掌握图论。此外,专栏还深入研究了图论在算法竞赛、网络流、匹配、着色、路径问题和并行计算中的应用。它还探讨了图论在数据分析中的作用,包括图数据库和图挖掘技术。通过对计算复杂度和优化问题的分析,专栏提供了解决困难图论问题的思路。总而言之,本专栏为图论学习者提供了一份全面且实用的指南,帮助他们从新手成长为专家。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
西门子Insight软件:新手必读的7大操作要点与界面解读
参考资源链接:[西门子Insight软件用户账户管理操作手册](https://wenku.csdn.net/doc/6412b78abe7fbd1778d4aa90?spm=1055.2635.3001.10343)
# 1. 西门子Insight软件概述
## 1.1 软件简介
西门子Insight软件是一款面向工业设备和生产线的先进监控与数据分析解决方案。它将实时数据可视化和
【BODAS通信协议详解】:3大关键点,精通控制器与外部设备交互

参考资源链接:[BODAS控制器编程指南:从安装到下载的详细步骤](https://wenku.csdn.net/doc/6ygi1w6m14?spm=1055.2635.3001.10343)
# 1. BODAS通信协议概述
BODAS通信协议,作为工业自动化领域内的一项重要技术标准,确保了不同设备之间的高效、准确通信。在深入探究其内部工作机制之前,我们需要对其基本概念有所了解。本章主要介绍了BODAS协议
【CAD软件兼容性宝典】:确保许可管理器与OS完美结合

参考资源链接:[CAD提示“许可管理器不起作用或未正确安装。现在将关闭AutoCAD”的解决办法.pdf](https://wenku.csdn.net/doc/644b8a65ea0840391e559a08?spm=1055.2635.3001.10343)
# 1. CAD软件兼容性的重要性
CAD(计算机辅助
【Innovus命令行快速指南】:掌握这些技巧,让你从新手变大师
参考资源链接:[Innovus P&R 操作指南与流程详解](https://wenku.csdn.net/doc/6412b744be7fbd1778d49af2?spm=1055.2635.3001.10343)
# 1. Innovus命令行基础介绍
Innovus是Cadence公司推出的一款用于芯片设计的集成电路设计软件,其强大的命令行工具支持从设计、仿真到验证
深度剖析:巡检管理系统单机版A1.0的八大核心功能

参考资源链接:[巡检管理系统单机版A1.0+安装与使用指南](https://wenku.csdn.net/doc/6471c33c543f844488eb0879?spm=1055.2635.3001.10343)
# 1. 巡检管理系统单机版A1.0概览
巡检管理系统单机版A1.0是一个创新的IT解决方案,旨在实现资产的自动化管理,简化巡检流程,提升维护工作的效率和质量。本章节将提供一个整体性的概览,包括系统的基本功能、
STC89C52指令集精讲:助你迅速成为编程高手的50条指令详解
参考资源链接:[STC89C52单片机中文手册:概览与关键特性](https://wenku.csdn.net/doc/70t0hhwt48?spm=1055.2635.3001.10343)
# 1. STC89C52单片机简介及指令集概述
STC89C52单片机是基于经典的8051架构,广泛应用于嵌入式系统的开发中。它拥有8位处理器核心,其指令集简洁高效,针对实时控制应用进行了优化。本章将对STC89C52单片机进
【LabVIEW错误代码防不胜防】:开发者的10大陷阱与解决方案
参考资源链接:[LabVIEW错误代码大全:快速查错与定位](https://wenku.csdn.net/doc/7am571f3vk?spm=1055.2635.3001.10343)
# 1. LabVIEW错误代码的由来和影响
当我们进行LabVIEW开发时,错误代码是不可避免的。错误代码通常由不正确的程序执行引起,它们提供了解决问题的线索。了解错误代码的由来和
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )