【CAN技术入门】:TJA1050控制器基础与高级配置指南
发布时间: 2024-12-16 15:05:17 阅读量: 5 订阅数: 5 

STM32F103+TJA1050CAN通讯-电路方案
参考资源链接:[TJA1050 CAN总线控制器详细应用与特性介绍](https://wenku.csdn.net/doc/646b40f6543f844488c9cad1?spm=1055.2635.3001.10343)
# 1. CAN技术概述
CAN(Controller Area Network)技术自20世纪80年代起就被引入汽车电子系统中,作为一种有效的短距离通信技术,它在确保数据传输的实时性和可靠性方面表现卓越。CAN技术最初由德国汽车制造商博世(Bosch)开发,后来演变为国际标准ISO 11898。这种技术能够处理高优先级的消息,并且具备一定的错误检测能力,使其成为工业自动化和许多其他领域的首选通信协议。
在深入探讨TJA1050控制器之前,了解CAN技术的基础知识是至关重要的。本章将介绍CAN协议的主要特点,包括它的分层架构、消息优先级机制和差错处理能力,为进一步学习TJA1050控制器的特性和应用打下坚实的基础。通过本章内容,读者将获得一个全面的CAN技术概览,并理解其在现代电子系统中的重要性。
# 2. TJA1050控制器基础
## 2.1 TJA1050控制器硬件特性
### 2.1.1 引脚分配和基本功能
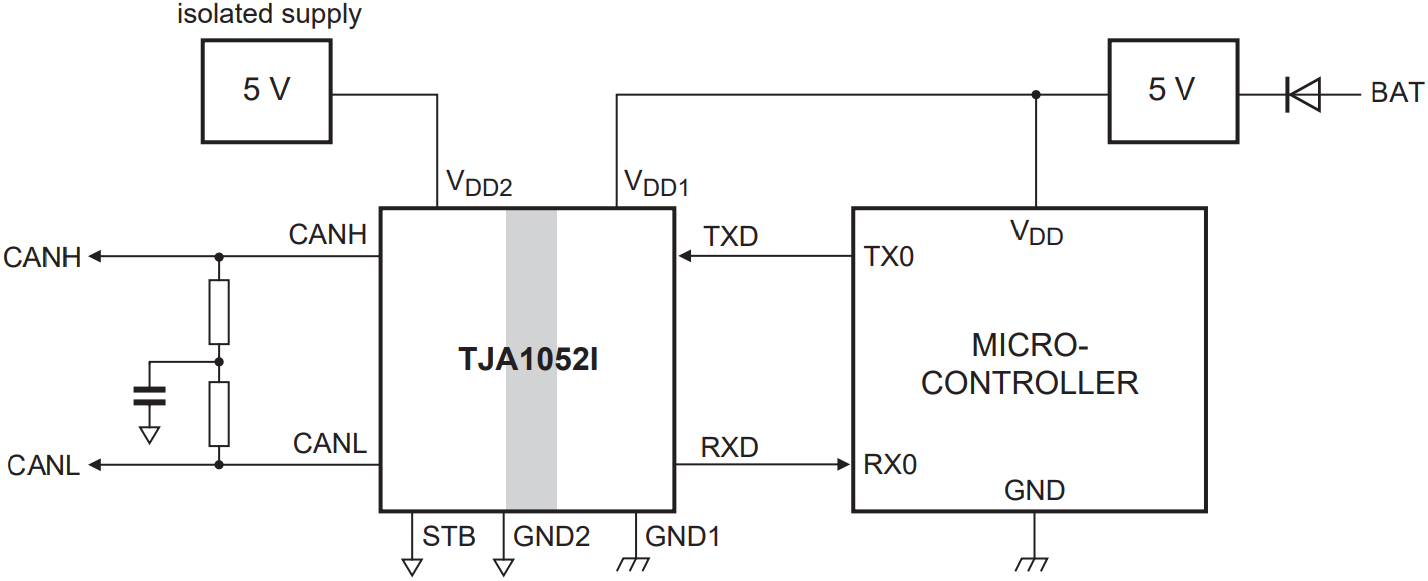
TJA1050作为CAN控制器和物理总线之间的接口,拥有多个关键的引脚,包括用于连接CAN总线的CANH和CANL、电源输入引脚(VDD和VSS)、用于配置工作模式的脚(如STB)、以及用于指示工作状态的脚(如ERR和RX)。每个引脚都承担着特定的功能,为TJA1050的工作提供支持。
- **CANH和CANL引脚**:连接到CAN网络的两条总线线路上,负责差分信号的发送和接收。
- **VDD和VSS引脚**:为TJA1050提供电源输入,通常VDD接正电源,VSS接地。
- **STB(Standby)引脚**:此脚用于将TJA1050置于低功耗模式或正常工作模式。通过控制此引脚电平,可以实现对TJA1050工作状态的切换。
- **ERR引脚**:作为错误报告输出,当TJA1050检测到总线错误时,ERR引脚会给出相应的逻辑电平信号。
- **RX引脚**:接收CAN控制器的数据。
### 2.1.2 电源管理与保护机制
TJA1050在设计上加入了电源管理与保护机制,确保了设备在不同环境下稳定运行。
- **电压监控电路**:内置电压监控电路,能够检测VDD电压。在电压低于正常工作范围时,TJA1050能够自动进入低功耗模式,保护电路不受损害。
- **热保护机制**:TJA1050还具有热保护功能,当芯片温度超过安全工作范围时,会自动断开与CAN总线的连接,防止过热引起的损坏。
## 2.2 TJA1050通信原理
### 2.2.1 CAN协议基础
TJA1050遵循CAN协议进行数据通信。CAN协议全称Controller Area Network(控制器局域网络),是一种被广泛应用于汽车、工业控制等环境中的通信协议。它使用非破坏性仲裁技术,确保网络上的信息流的稳定和准确。
- **非破坏性仲裁技术**:在数据发送过程中,如果多个节点同时尝试发送数据,仲裁机制会根据ID的优先级决定哪个节点可以发送数据,确保网络不会因为数据冲突而停止工作。
- **消息ID**:每个CAN消息都有一个标识符(ID),用于表示消息的优先级。
### 2.2.2 TJA1050在CAN网络中的角色
TJA1050扮演的角色是网络上的物理层和数据链路层之间的一个接口。它负责将数据链路层的数据帧转换成能够在CAN总线上发送的电信号,反之亦然。
- **信号转换**:TJA1050将来自CAN控制器的数据帧转换为符合CAN协议的差分信号,通过CANH和CANL引脚发送到总线上。
- **错误检测与处理**:TJA1050能检测总线上的错误,并在检测到错误时报告给CAN控制器,确保数据传输的准确性。
## 2.3 TJA1050的配置与初始化
### 2.3.1 配置寄存器概述
TJA1050的内部寄存器控制着其工作模式和参数设置。配置这些寄存器可以调整TJA1050的行为,满足特定的应用需求。
- **工作模式配置**:通过配置寄存器,可以将TJA1050设置为正常工作模式、睡眠模式等。
- **波特率设置**:配置寄存器用于设置CAN总线的波特率,根据网络需求和物理条件进行调整。
### 2.3.2 初始化流程详解
初始化TJA1050是确保其正确工作的关键步骤。初始化流程包括上电、配置寄存器、进入正常工作状态等一系列动作。
- **上电序列**:首先为TJA1050提供稳定的电源,然后等待内部振荡器稳定。
- **寄存器配置**:通过SPI或I2C接口对TJA1050的寄存器进行配置,设置工作参数。
- **进入工作模式**:配置完成后,通过拉高STB引脚或发送特定的命令,将TJA1050置于正常工作模式。
在实际应用中,初始化流程的每一步都可能涉及到对设备状态的检查和确认,确保TJA1050能安全且高效地开始工作。
# 3. TJA1050高级配置技术
## 3.1 差错检测与处理
### 3.1.1 差错检测机制
在CAN通信协议中,差错检测机制是保障数据传输可靠性的重要组成部分。TJA1050控制器支持多种差错检测技术,包括循环冗余检查(CRC)、消息帧检测和帧间隔检查等。每一条消息在发送前都会计算出一个CRC码,接收方在收到数据后会重新计算CRC,并与发送方提供的CRC码进行对比,以检测数据在传输过程中是否出现了错误。此外,TJA1050还可以检测帧格式错误、帧间隔时间错误等问题。
在差错检测的过程中,TJA1050控制器会将检测到的错误记录在状态寄存器中,供外部微控制器查询和处理。这为开发者提供了一种途径来监控通信链路的健康状况,并在必要时进行干预。
```mermaid
graph LR
A[发送消息] --> B[计算CRC]
B --> C[封装数据]
C --> D[发送数据]
D --> E[接收数据]
E --> F[计算CRC]
F
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【MIL-STD-810F实战秘籍】:提升军用设备环境适应性的必知要点

参考资源链接:[MIL-STD-810F简体中文版本](https://wenku.csdn.net/doc/6412b708be7fbd1
【JSON_XML 数据处理秘籍】:DAHUA HTTP API 高级技巧解析
参考资源链接:[大华官方2018-11版HTTP接口协议CGI规范与安全建议](https://wenku.csdn.net/doc/6412b6dcbe7fbd1778d483d5?spm=1055.2635.3001.10343)
# 1. JSON与XML数据格式概述
数据在现代信息技术领域中占有举足轻重的地位,而数据格式的选
华为云服务选型秘籍:为业务选择合适的华为云服务,提升效率50%

参考资源链接:[华为云业务迁移与服务详解](https://wenku.csdn.net/doc/aqwkij8iqb?spm=1055.2635.3001.10343)
# 1. 华为云服务概述
云计算已经成为现代企业IT基础设施的基石。华为云作为这一领域的佼佼者,以其独特的优势在国内外市场站稳了脚跟。华为云提供从基础计算到高级AI服务的全栈云服务解决方案,致力于为企业提供安全、稳定、高效的云服务。
本章将带您初步了解华
海洋工程新视界
参考资源链接:[ANSYS AQWA教程:三维海洋工程浮体波浪载荷计算](https://wenku.csdn.net/doc/3txgv2ra18?spm=1055.2635.3001.10343)
# 1. 海洋工程概述
海洋工程是涉及利用、开发
【高级连接策略】:提升iFIX与SQL数据库交互效率的高阶方法
参考资源链接:[IFIX与SQL数据库连接及IFIX2DB工具使用教程](https://wenku.csdn.net/doc/6412b77cbe7fbd1778d4a76f?spm=1055.2635.3001.10343)
# 1. iFIX与SQL数据库交互的现状分析
工业自动化领域中,iFIX作为一款广泛使用的工业监控软件,经常需要与SQL数据
Kepware 6 入门指南:快速搭建与Smart200的连接(10分钟内学会)
参考资源链接:[Kepware6与smart200连接案例](https://wenku.csdn.net/doc/6412b75abe7fbd1778d49fdb?spm=1055.2635.3001.10343)
# 1. Kepware 6 的基础知识
在工业自动化领域中,Kepware是广泛使用的软件之一,它可以帮助实
【VHDL万年历设计】:10大技巧打造完美时钟
参考资源链接:[VHDL课程设计--万年历,课程设计报告。包括各个模块的代码及仿真图](https://wenku.csdn.net/doc/6412b6debe7fbd1778d4843b?spm=1055.2635.3001.10343)
# 1. VHDL基础与数字时钟概念
## VHDL基础
VHDL(VHSIC Hardware Description Language)是一种用于电子系统的硬件描述语言,广泛应用于FPGA和ASIC的设计中。它不仅能够描述电路的结构,还可以描述电路的行为和功能。VHDL语言的强大之处在于其对并行操作的描述能力,这对于设计复杂的数字系统尤为重要。
跨平台编程的艺术:PJLink 1.04 Class1的编程技巧与最佳实践

参考资源链接:[PJLink 1.04协议:简化多设备网络投影机控制](https://wenku.csdn.net/doc/6412b761be7fbd1778d4a186?spm=1055.2635.3001.10343)
# 1. PJLink 1.04 Class1概述与基
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )