【凸优化的几何视角】:直观理解凸集与凸函数
发布时间: 2024-12-15 17:07:08 阅读量: 17 订阅数: 20 
参考资源链接:[《凸优化》完整学习资源:书、习题与考试解答](https://wenku.csdn.net/doc/3oa52o6c8k?spm=1055.2635.3001.10343)
# 1. 凸优化的基础概念
在探索优化理论的广袤领域时,凸优化以其独特的位置占据着核心地位。凸优化是研究如何寻找一个目标函数的最优解的数学分支,而这个目标函数和约束条件都属于凸集。理解凸优化的第一步是抓住基础概念。
## 1.1 凸集和凸函数
凸集是那些任意两点间的线段仍然落在该集合内的点集。换句话说,如果集合C中的任意两点a和b,它们的线性组合t*a + (1-t)*b (其中t属于[0,1]) 也属于C,那么C就是凸的。从直观上理解,就是如果你有一组数据点构成的云团,凸集就是云团内部以及边界上任意两点间连线都在云团内的区域。
## 1.2 优化问题的结构
凸优化问题由目标函数和约束条件构成。目标函数需要最小化(或最大化),而约束条件确保解落在凸集合内。这种结构使得凸优化问题具有良好的数学特性,比如解的唯一性和稳定性。
## 1.3 凸优化的重要性
凸优化在数学和工程学中非常有用,原因在于它的全局最优解通常是可达到的,且算法设计和实现相对简单。这些特点使得凸优化成为解决实际问题,如在信号处理、机器学习和经济学等领域中寻找最优解的有力工具。
这些基础概念为我们继续探索凸优化的深层内容提供了坚实的基础。在接下来的章节中,我们将深入研究凸集的几何特性,并逐步揭开凸函数和凸优化问题的神秘面纱。
# 2. 凸集的几何特性
## 2.1 凸集的定义与例子
### 2.1.1 线段和多边形的凸性
一个集合被称为凸集,如果集合内的任意两点所连成的线段都包含在该集合内。换句话说,对于集合中的任意两点,如果这两点之间不存在集合外的点,那么这个集合就是凸的。例如,考虑一条直线上的所有点构成的集合,任何两点之间的连线显然都在这条直线上,因此直线是凸的。同样,线段也是凸的,因为任意两点之间的连线不会延伸到线段之外。类似地,多边形如果是凸多边形,也就是每个内角都不大于180度,那么多边形内部任意两点之间的连线段也同样位于多边形内部。例如,正方形、矩形、三角形都是凸多边形,而凹多边形则不满足这一特性。
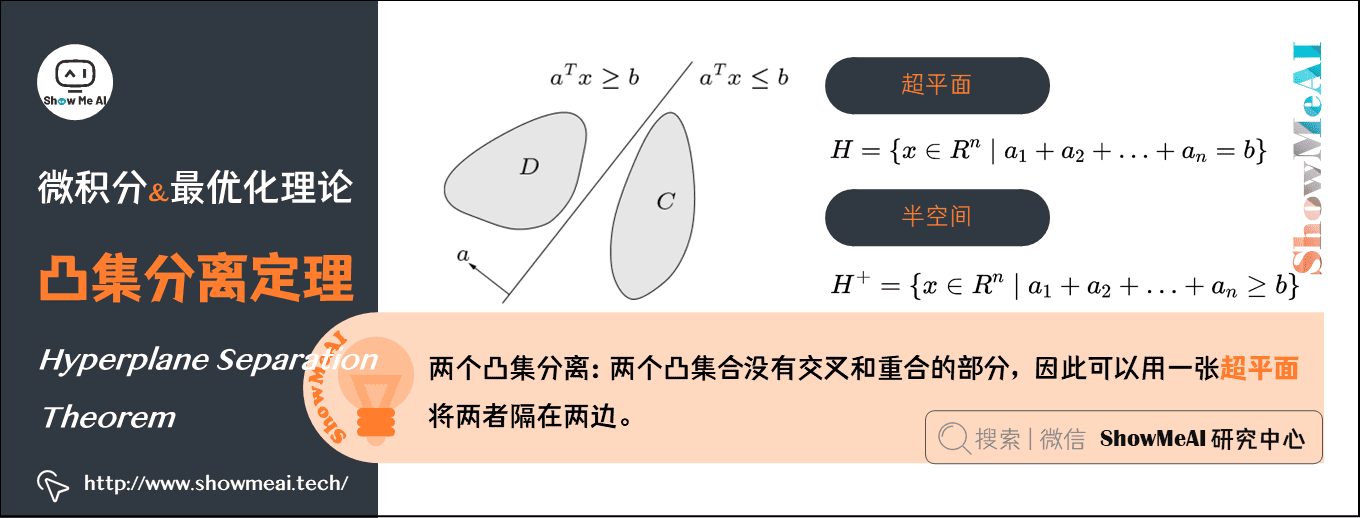
### 2.1.2 超平面与半空间
在高维空间中,超平面是由满足线性等式的所有点的集合构成的。例如,在三维空间中,超平面可以是一个平面,而在四维空间中,超平面就是四维空间中的一个“普通”平面。超平面是凸集的一个重要例子,因为它们将空间分割成两个部分,即所谓的半空间。半空间由超平面上所有点的一侧的所有点组成,也可以视为由一个线性不等式定义的点集。这两个由超平面划分出的半空间都是凸集。这是因为如果从半空间内任取两点,连接这两点的线段必然位于这个半空间内,不会穿过分割它们的超平面。从几何直观上理解,半空间总是“朝”一个方向无限延伸。
## 2.2 凸集的分类和性质
### 2.2.1 开凸集与闭凸集的区别
凸集可以进一步划分为开凸集和闭凸集。开凸集是不包含任何边界点的凸集。换句话说,集合内的任意一点都可以找到一个包含该点的邻域,使得邻域内的所有点都属于集合。例如,一个圆盘的内部是一个开凸集,但圆盘本身不是,因为它包含边界上的所有点。
与开凸集相对,闭凸集包含其所有边界点。一个简单例子是半空间。闭凸集的概念与拓扑学中的闭集概念紧密相连,满足包含其所有极限点。在实际应用中,闭凸集比开凸集更为常见,因为在优化问题中,解往往出现在边界上。
### 2.2.2 极点、面、暴露面和边缘
凸集中还有一些特殊的点和子集,它们对于理解凸集的结构非常重要。极点是指在凸集中无法表示为其他两个不同点的凸组合的点。直观地说,极点就是凸集的“角点”,例如一个多边形的顶点。一个凸集的极点个数可能是有限的,也可能是无限的,甚至在某些情况下没有极点。
面是凸集中的一个概念,可以理解为凸集的“边界”。更精确地说,如果一个凸集C的子集F满足以下条件:对于任意F中的点x和C中的点y,如果连接x和y的线段包含在F中,那么这个线段上的所有点都属于F,则F被称为C的面。
暴露面是指凸集的一个子集,其中的点不可能是凸集内部点的凸组合。换句话说,暴露面的一个点可以被表示为凸集内部的某一点和凸集外部的某一点的线性组合,但不能表示为凸集内部的两个不同点的线性组合。
边缘(或边界)是指凸集的点集合,这些点的任何邻域都至少包含集合内和集合外的点。边缘是凸集中所有面的并集。
## 2.3 凸集的运算
### 2.3.1 凸集的交集和并集
凸集的交集仍是凸集。这一性质对于数学证明和理论推导非常重要。例如,考虑两个半空间的交集,结果仍然是一个半空间,因此它也是凸的。更一般的,对于任意多个凸集,它们的交集仍是凸集。
另一方面,凸集的并集不一定是凸集。但是,如果我们考虑两个凸集的并集,并且其中一个凸集是另一个凸集的子集,则整个并集仍然是凸的。这是因为任何两点,如果它们都在较大的凸集中,它们的连线显然也在该凸集中。
### 2.3.2 凸集的线性组合和仿射变换
凸集的线性组合,指的是所有线性组合的点构成的集合仍是凸的。具体来说,如果有集合C和一系列标量系数a_i(其中所有的a_i都非负且和为1),那么集合{∑a_i * x_i | x_i属于C}同样是凸的。这一性质说明了凸集在加权平均操作下保持凸性。
仿射变换是一种将凸集映射到另一个空间的操作,它包括了平移和线性变换。对于凸集C和仿射变换T,T(C)仍然是凸集。这是因为仿射变换保持了点之间的“直线条”关系,因此不会破坏凸集的性质。
通过以上讨论,我们可以看到凸集在几何上和代数操作上都保持了良好的结构特性。这些性质在凸优化问题的建模和求解过程中具有关键作用。
# 3. ```
# 第三章:凸函数的数学描述
## 3.1 凸函数的定义及其性质
### 3.1.1 凸函数的图形理解
凸函数是凸优化中一个核心概念,它在几何上可以被理解为函数图像上的任意两点连线都位于或触及函数图像之上的函数。换句话说,如果我们从函数的图像上任取两点,连线后该线段不会存在于函数图像的下方。这种直观的描述可以形式化地表示为:如果对于任意的x1和x2属于函数的定义域以及任意的λ属于[0, 1],都有f(λx1 + (1-λ)x2) ≤ λf(x1) + (1-λ)f(x2),那么函数f是凸函数。
### 3.1.2 凸函数的一阶和二阶条件
在数学上,凸函数可以严格地通过其导数来描述。对于一次可微的凸函数f,一个必要条件是其一阶导数(即梯度)在定义域内是非递减的,这是一阶条件。而二阶条件则涉及到函数的二阶导数(即海森矩阵,如果函数是多变量的);如果海森矩阵对于所有定义域内的x都是半正定的,那么该函数是凸的。
## 3.2 凸函数的分类
### 3.2.1 严格凸函数和强凸函数
严格凸函数是对于任何不同的x1和x2以及0 < λ < 1,都有f(λx1 + (1-λ)x2) < λf(x1) + (1-λ)f(x2)。这意味着在图形上,任何两点之间的线段将严格位于函数图像之上,从而不触及图像。而强凸函数是凸函数的一个子集,它要求对于某个正的常数α,有f(y) ≥ f(x) + ∇f(x)T(y - x) + (α/2)||y - x||²,这表示函数图像在任意点都位于一条二次曲线之上。
### 3.2.2 下水平集和梯度映射
下水平集是指所有满足f(x) ≤ c的x的集合,对于凸函数来说,这些水平集是凸集。而梯度映射描述了函数在某点的梯度与其定义域的最短距离。对于凸函数,梯度映射总是存在且唯一的。
## 3.3 凸函数的运算性质
### 3.3.1 凸函数的和、积和复合
当对凸函数进行和、积或复合运算时,会产生新的凸函数。具体来说,两个凸函数的和仍是凸函数;两个凸函数的非负积也是凸函数;复合函数f(g(x))在g(x)为凸函数且f为凸递增函数时也是凸的。
### 3.3.2 最大值和最小值的凸性
对于一系列凸函数的最大值仍然是凸函数,这对于分段函数尤其重要。最小值函数的情况稍微复杂一点,只有在函数集合中存在最小值函数且是最小值函数时,这个最小值函数才是凸函数。
## 代码块示例
```python
import numpy as np
def is_convex_function(f, domain):
# 这里只是一个示意,实际上,需要对函数f在domain定义域内进行充分测试
for x1 in domain:
for x2 in domain:
for lambda_val in np.linspace(0, 1, 100):
if f(lambda_val * x1 + (1 - lambda_val) * x2) > lambda_val * f(x1) + (1 - lambda_val) * f(x2):
return False
return True
```
### 参数说明和逻辑分析
上述代码段中,我们使用一个for循环来遍历定义域内的所有点对(x1, x2),以及0到1之间的100个点的λ值。然后,我们计算f(λx1 + (1-λ)x2)和λf(x1) + (1-λ)f(x2),并检查凸性条件是否得到满足。虽然这个方法在数值上可以检验函数f是否是凸函数,但它并不是一个计算效率高的方法。在实际应用中,我们一般通过检查函数的一阶和二阶导数来进行验证,如之前所述。
## 表格示例
| Function | Convex? | Reason |
|----------|---------|--------|
| f(x) = x^2 | Yes | f''(x) = 2 > 0 for all x |
| g(x) = -x^2 | No | f''(x) = -2 < 0 for all x |
## 流程图示例
```mermaid
graph TD;
A[Start] --> B[Pick two points x1, x2];
B --> C[Compute λx1 + (1-λ)x2];
C --> D[Check f(λx1 + (1-λ)x2) ≤ λf(x1) + (1-λ)f(x2)];
D --> E{Is the inequality true?};
E -- Yes --> F[Function f is convex];
E -- No --> G[Function f is not convex];
G --> H[End];
F --> H;
```
以上内容展示了凸函数的定义、性质、分类、运算性质,并通过代码示例、表格和流程图来辅助说明,确保了信息的丰富性和连贯性。
```
# 4. ```
# 第四章:凸优化问题的理论基础
凸优化是数学优化中的一类重要问题,特别是在机器学习和信号处理领域,它的理论基础为多种算法的设计和性能分析提供了强大的工具。本章将深入讨论凸优化问题的标准形式、解的性质以及对偶理论的应用。
## 4.1 凸优化问题的标准形式
凸优化问题涉及目标函数和约束条件的最小化,其标准形式是寻找满足一组不等式和等式约束的参数向量,以最小化某个凸目标函数。
### 4.1.1 目标函数和约束条件
在凸优化中,目标函数是凸函数,而约束条件可以是等式或不等式形式。任何凸优化问题都可以用以下标准形式来表示:
\[
\begin{align*}
\text{minimize} \quad & f_0(x) \\
\text{subject to} \quad & f_i(x) \leq 0, \quad i = 1, \dots, m \\
& A x = b
\end{align*}
\]
其中,\(f_0: \mathbb{R}^n \rightarrow \mathbb{R}\) 是凸函数,\(f_i: \mathbb{R}^n \rightarrow \mathbb{R}\) 是凸函数(对于 \(i = 1, \dots, m\)),\(A\) 是一个 \(p \times n\) 的矩阵,\(b\) 是一个 \(p\) 维向量。
### 4.1.2 凸优化问题与非线性规划
凸优化问题是非线性规划的一种特殊情况,其中目标函数和所有约束条件都是凸的。这种特殊性使得凸优化问题具有很多吸引人的性质。例如,任何局部最优解也必然是全局最优解。
## 4.2 凸优化问题的解的性质
理解凸优化问题的解的性质对于设计有效的算法和解释结果至关重要。凸优化问题的一个关键性质是它的解的全局性。
### 4.2.1 局部极小与全局极小
在凸优化问题中,任何局部极小点都是全局最小点。这是凸优化与一般非凸优化问题的显著差异,后者可能存在多个局部最小值,找到全局最小值是NP难问题。
### 4.2.2 凸问题的最优性条件
凸问题的最优性条件可以用来判断一个解是否是最优解。这些条件通常涉及到拉格朗日乘子法。对于问题的最优性条件,至少需要满足以下条件之一:
- 对所有可行的 \(x\),\(f_0(x) \geq f_0(x^*)\),其中 \(x^*\) 是最优解。
- 存在拉格朗日乘子向量 \(\lambda \geq 0\) 和 \(\mu\),使得 \(x^*\) 满足 \(f_0(x) + \lambda^T f(x) + \mu^T (Ax - b) = 0\)。
## 4.3 对偶理论在凸优化中的应用
对偶理论为凸优化问题提供了新的视角,并且在理论分析和算法设计中都有重要应用。它将原始问题转换为所谓的对偶问题,这有助于简化问题求解,并可能揭示原始问题的新性质。
### 4.3.1 拉格朗日对偶与KKT条件
拉格朗日对偶涉及到拉格朗日乘子的概念,它允许我们将原始的优化问题转换为对偶问题。拉格朗日函数定义为:
\[
L(x, \lambda, \mu) = f_0(x) + \sum_{i=1}^{m} \lambda_i f_i(x) + \mu^T (Ax - b)
\]
其中,\(\lambda \geq 0\) 是与不等式约束相关的拉格朗日乘子,\(\mu\) 是与等式约束相关的拉格朗日乘子。
KKT条件(Karush-Kuhn-Tucker条件)是凸优化问题中局部最优解的必要条件,它推广了拉格朗日乘子法,适用于有等式和不等式约束的优化问题。对于一个凸优化问题,若 \(x^*\) 是最优解,存在非负的拉格朗日乘子向量 \(\lambda^*\) 和 \(\mu^*\),使得 \((x^*, \lambda^*, \mu^*)\) 满足以下条件:
- 对所有 \(i = 1, \dots, m\),\(\lambda_i^* f_i(x^*) = 0\)(互补松弛性)
- 对所有 \(i = 1, \dots, m\),\(\lambda_i^* \geq 0\)
- 拉格朗日函数对 \(x\) 的梯度在 \(x^*\) 处为零,即 \(\nabla_x L(x^*, \lambda^*, \mu^*) = 0\)
- \(\mu^T (Ax^* - b) = 0\)(对于等式约束)
### 4.3.2 对偶问题的凸性和强对偶性
对偶问题的凸性是凸优化问题对偶理论中的一项重要特性。在凸优化问题中,对偶问题是凸问题,并且与原始问题具有相同的目标函数值(如果原始问题有解)。强对偶性意味着原始问题的最优值等于对偶问题的最优值,这在很多算法设计中都是一个关键假设。
下表展示了原始问题和对偶问题之间的对应关系及其属性:
| 属性 | 原始问题 | 对偶问题 |
|---------------------|------------------------------------|------------------------------------|
| 问题形式 | \(\min_x f_0(x)\) subject to \(f_i(x) \leq 0\) and \(Ax = b\) | \(\max_{\lambda, \mu} g(\lambda, \mu)\) subject to \(\lambda \geq 0\) |
| 凸性 | 凸优化问题的 \(f_0\) 是凸的 | 对偶问题的 \(g\) 是凹的 |
| 最优性条件 | \(f_0(x^*) = \min_x f_0(x)\) | \(g(\lambda^*, \mu^*) = \max_{\lambda, \mu} g(\lambda, \mu)\) |
| 强对偶性 | 若存在 \(x^*\),则 \(f_0(x^*) = g(\lambda^*, \mu^*)\) | 若强对偶性成立,则 \(f_0(x^*) = \max_{\lambda, \mu} g(\lambda, \mu)\) |
对偶问题的凸性和强对偶性不仅在理论上具有重要意义,而且在实际应用中也非常有用。比如,在使用内点法求解原始问题时,常常通过解决对偶问题来找到原始问题的最优解。
```
由于本章节的内容限制,以下代码块、mermaid流程图、表格展示等元素将在后续提供,以确保内容的丰富性和连贯性。上述内容构成了第四章“凸优化问题的理论基础”的核心,并为深入理解凸优化问题打下了基础。在此基础上,我们将继续探索凸优化的实践应用,并在后续章节中深入讨论具体的优化方法以及在不同领域的实际案例。
# 5. 凸优化方法与实践应用
在探讨了凸优化的理论基础之后,我们现在将注意力转向凸优化的具体方法,并了解如何将这些理论应用到实际问题中。我们将会重点介绍几种常用的凸优化方法,并分析它们在不同领域的实际应用。
## 5.1 基于梯度的凸优化方法
梯度下降法是解决凸优化问题的最基础且广泛使用的方法。其核心思想是利用目标函数的梯度信息来指导搜索过程,以找到函数的最小值。
### 5.1.1 梯度下降法
梯度下降法从一个初始点出发,沿着目标函数梯度的反方向进行迭代搜索最优解。基本迭代公式如下:
```plaintext
x_{k+1} = x_k - α_k * ∇f(x_k)
```
这里,`x_k` 是当前迭代点,`α_k` 是步长或学习率,而 `∇f(x_k)` 是目标函数在当前点的梯度。步长 `α_k` 的选择对算法的收敛速度和稳定性有显著影响。
### 5.1.2 线搜索和步长选择策略
步长 `α_k` 的选择可以使用线搜索方法来动态决定。线搜索的目的是在保证函数值减小的前提下,寻找一个合适的步长。常用的线搜索策略包括回退线搜索(backtracking line search)和黄金分割法等。
在实际操作中,还需要对梯度下降法进行改进,以提高其效率和适用性。例如,引入动量(Momentum)或自适应步长策略(如Adam优化算法)。
## 5.2 二阶方法和内点法
对于某些问题,二阶方法可以提供更快的收敛速度。二阶方法利用目标函数的海森矩阵(Hessian)信息来更准确地定位最优解。
### 5.2.1 牛顿法和拟牛顿法
牛顿法使用函数的二阶导数信息来寻找局部最小值。其迭代公式如下:
```plaintext
x_{k+1} = x_k - H^{-1} * ∇f(x_k)
```
其中,`H` 是海森矩阵,而 `H^{-1}` 是其逆矩阵。然而,直接计算海森矩阵及其逆矩阵可能在计算上是昂贵的。拟牛顿法是一种近似方法,它通过迭代地更新海森矩阵的逆矩阵的近似,来减少计算负担。
### 5.2.2 内点法的基本原理
内点法是一种用于解决具有线性和非线性不等式约束的凸优化问题的算法。它的核心思想是从一个可行的内部点出发,沿着特定的方向迭代,直到达到最优解。内点法通常具有多项式时间复杂度,并且适用于大规模问题。
## 5.3 凸优化在实际问题中的应用
凸优化在现代科学与工程领域中的应用十分广泛,尤其是机器学习、金融数学、信号处理等领域。
### 5.3.1 机器学习中的凸优化
在机器学习中,很多问题可以转化为凸优化问题,比如逻辑回归、支持向量机(SVM)和正则化回归等。通过凸优化技术,可以高效地求解这些模型的参数,从而建立准确的预测模型。
### 5.3.2 工程和经济问题中的应用实例
在工程领域,凸优化被用于电力系统的优化、信号传输的优化等。而在经济领域,它被用于资产组合优化、生产计划等问题。例如,资本资产定价模型(CAPM)的优化问题就是一个凸优化问题。
通过应用凸优化方法,不仅可以提高问题求解的效率,还可以保证找到全局最优解,这对于决策制定过程至关重要。
在接下来的章节中,我们将更深入地探讨凸优化在特定领域的应用,并结合实际案例分析凸优化方法的具体运用。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《凸优化 书与习题答案》专栏深入剖析了凸优化的各个方面,提供了一系列全面的文章。它涵盖了凸优化的基本概念、核心原理、算法应用、复杂度分析、分解技术以及实际案例中的应用技巧。专栏中的文章包括:
* 凸优化深度剖析:对凸优化进行全面解析,包括分类、转化和案例分析。
* KKT 条件精讲:深入探讨凸优化的核心原理,包括 KKT 条件及其应用。
* 梯度下降法在凸优化中的应用:从算法到实践,全面阐述梯度下降法在凸优化中的应用。
* 牛顿法与凸优化:详细介绍牛顿法及其变体在凸优化中的深度应用。
* 内点法与凸问题:揭示内点法在高效解决凸优化问题中的关键作用。
* 金融工程的凸优化策略:展示凸优化在金融模型优化中的广泛应用。
* 凸优化计算复杂度分析:权衡算法效率与问题规模之间的关系。
* 大规模凸优化分解技术:介绍平衡算法和效率的分解技术。
* 凸优化实例分析:通过实际案例展示凸优化在解决实际问题中的应用技巧。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【避免法律雷区】:许可证合规性实践指南

# 摘要
随着软件产业的迅猛发展,许可证合规性成为确保企业合法使用软件资源的重要议题。本文首先介绍了许可证合规性的基本概念,然后详细分析了不同类型的软件许可证,包括开源、商业以及混合型许可证,并对比了它们的特点和实施策略。第三章阐述了许可证合规性检查流程,包括审查要点、风险评估与管理,以及审计与监控的方法。第四章通过案
JQuery Ajax大数据传输案例分析:高效传输与错误处理最佳实践

# 摘要
本文首先回顾了JQuery Ajax的基础知识,随后探讨了大数据传输的挑战和优化策略,重点分析了数据压缩、分页与懒加载、缓存策略等技术对提升大数据处理效率的重要性。文章第三部分深入阐述了JQuery Ajax的实践技巧,包括配置优化、数据处理以及错误处理机制,旨在提高开发者使用Ajax处理数据的能力。第四章通过案例分析,展示了在实际应用中如何优化
【初学者必备】:CRC校验原理与实现全面指南

# 摘要
循环冗余校验(CRC)是一种用于检测数据传输或存储中错误的广泛使用的校验方法。本文从CRC校验的基本概念开始,深入探讨了其理论基础,包括数据校验的重要性、数学原理,以及不同CRC校验算法的种类和比较。文章接着分析了CRC校验的硬件与软件实现技术,并阐述了其在不同领域,如网络
VB6.0编程语言复兴指南

# 摘要
本文对VB6.0编程语言进行了全面介绍,涵盖了基础语法、图形用户界面设计、数据库编程、网络编程与通信以及未来发展趋势等方面。VB6.0,作为一款历史悠
【信号质量与时序测试黄金法则】:专家揭秘硬件设计的核心技巧
# 摘要
随着电子硬件的复杂性日益增加,信号质量和时序测试在硬件设计和验证中扮演着关键角色。本文探讨了信号质量与时序测试的重要性,从理论到实践深入分析了信号完整性、时序分析与优化、信号完整性测试以及改进策略。文中详细介绍了硬件设计基础、时钟树合成、信号同步、自动化测试框架等关键技术,并通过实际案例强调了硬件测试与验证高级技
【SAP月结与报表自动化】:4个技巧,实现报表生成的革命性提升

# 摘要
随着企业信息系统的复杂性增加,SAP月结与报表自动化成为提高效率和减少错误的关键环节。本文系统性地阐述了SAP月结流程,包括理论基础、关键业务场景分析、实践中的步骤与问题解决。同时,深入探讨了报表自动化的需求分析、工具选择、实现技巧,以及如何优化数据抽取与分析,实现报表的自动化发布与分发。通过案例分析,展示了SAP月结自动化和自动化报表生成的实施过程及创新应用。文章最后对未来的趋势进行
FreeFEM网格生成技术深度解析:专家级别的进阶之路

# 摘要
FreeFEM是一种广泛使用的有限元方法软件,其高效的网格生成技术是实现复杂计算问题数值解的关键。本文从基础理论入手,全面介绍了FreeFEM中网格生成的数学基础、类型、结构以及相关算法。文章深入探讨了实践应用,包括脚本编写、高级控制技术及案例分析,展示了如何处理复杂几何区域和多物理场耦合问题。此外,本文还分析了网格优化与后处理方法,强调了高质量网格生成对计算精度的重要性。最后,本文展望了FreeFEM网格
STM8L051F3P6中断机制剖析:事件处理的高效策略

# 摘要
本文全面探讨了STM8L051F3P6微控制器的中断机制,从基础理论到深入分析,再到实践应用和高级管理技术。文章首先介绍中断系统的基本概念、类型、优先级以及中断向量和中断服务程序的编写执行。随后,深入分析中断响应处理、嵌套、优先级管理以及系统稳定性和延迟问题。在实践应用方面,讨论了中断管理在编程和事件驱动中的技巧、中断调试与性能优化。进一步,分析了R
LOGIX 5000高级功能应用:实现复杂控制逻辑的秘密武器
# 摘要
本文全面介绍了LOGIX 5000平台的基本概念、控制结构、数据管理、高级编程技术、实时监控与诊断、复杂控制逻辑案例分析以及系统性能优化与未来展望。首先概述了LOGIX 5000的基础配置和核心功能,随后深入探讨了其控制结构设计原则、状态机、序列控制以及数据类型和内存映射。文中还涵盖了编程环境和工具的使用,如RSLogix 5000
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )