【PMSM电机FOC控制高级技巧】:算法优化与性能提升(实践攻略)
发布时间: 2024-12-15 11:43:43 阅读量: 110 订阅数: 22 

AN1078-PMSM电机FOC控制中文.pdf
参考资源链接:[Microchip AN1078:PMSM电机无传感器FOC控制技术详解](https://wenku.csdn.net/doc/6412b728be7fbd1778d494d1?spm=1055.2635.3001.10343)
# 1. PMSM电机和FOC控制的基础理解
随着电气化技术的快速发展,永磁同步电机(PMSM)因其高效率、高扭矩密度和良好的控制性能在各个领域得到了广泛应用。对于这样的电机,尤其是在需要精确控制的应用中,矢量控制,特别是基于场向量控制(FOC)的技术已经成为了一个重要的控制策略。本章将介绍PMSM电机的基本工作原理,以及FOC控制的基础概念。
## 1.1 PMSM电机的工作原理
PMSM电机是一种交流电机,其定子构造与传统的感应电机类似,但转子使用了永磁材料。这意味着它不需要外部激励来建立磁场,转子磁场由永磁体产生。PMSM电机由于采用了永磁材料,避免了感应电机中必须的转子电阻损耗,这使得其运行效率更高。为了实现高效精准的电机控制,FOC算法被广泛应用于PMSM电机。
## 1.2 FOC控制的基本概念
FOC(Field Oriented Control),也称为矢量控制,是一种用于交流电机控制的技术,其核心是模拟直流电机的运行特性,使得电机转矩的控制就像控制直流电机一样简单直接。FOC通过将定子电流分解为与转子磁场同步旋转的坐标系中的两个正交分量:磁通产生分量和转矩产生分量。这种分解使得可以通过独立控制这两个分量来分别控制电机的磁通和转矩,进而实现电机的精确控制。
为了实现FOC,需要准确测量和控制电机的电流、速度和位置。因此,高级的传感器和算法必不可少,比如增量编码器或霍尔效应传感器来检测转子位置,而电流和电压传感器则用于实时监测电机的工作状态。这些传感器的信号通过特定的算法处理后,提供给FOC控制器以实现精确的电机控制。
通过本章的讲解,读者应该对PMSM电机的基本结构和FOC控制的基本原理有了初步的理解。随着章节的深入,将逐步解析FOC算法的具体实现、优化方法和在PMSM电机控制中的应用。
# 2. FOC算法的理论深入分析
### 2.1 FOC控制算法原理
#### 2.1.1 电机控制的基本概念
在交流电机控制中,矢量控制(也称场向量控制)是一种控制技术,它允许将交流电机的定子电流分解成相互垂直的两个分量,通常称为直轴电流(id)和交轴电流(iq),分别对应于电机磁通量的控制和转矩的控制。此控制方式通过模拟直流电机的性能,实现对电机转矩和磁通量的独立控制,从而使交流电机具有与直流电机相媲美的控制性能。
与标量控制(如传统的V/f控制)相比,矢量控制在响应速度、控制精度、动态性能等方面都有显著提升。这是因为矢量控制可以精确地控制电机的磁通和转矩,而不会受到电机参数变化的影响,这是在诸如机器人、伺服驱动器以及精密运动控制等应用中非常重要的。
#### 2.1.2 FOC算法的工作机制和优势
场定向控制(Field-Oriented Control,FOC),是矢量控制的一种,它通过实时检测和调整定子电流的相位,控制电机的磁通和转矩产生,实现对电机转速和位置的精确控制。FOC算法的关键在于它能够将电机的三相电流转换为两个互相垂直的分量(id和iq),并通过闭环反馈实现精确控制。
FOC算法的优势在于:
- 高精度的速度和位置控制
- 快速动态响应
- 高效率和高性能运行
- 对电机参数变化具有很好的鲁棒性
与传统控制算法相比,FOC在电机的控制性能上有着质的飞跃,特别是在需要高速精确控制的应用场合。
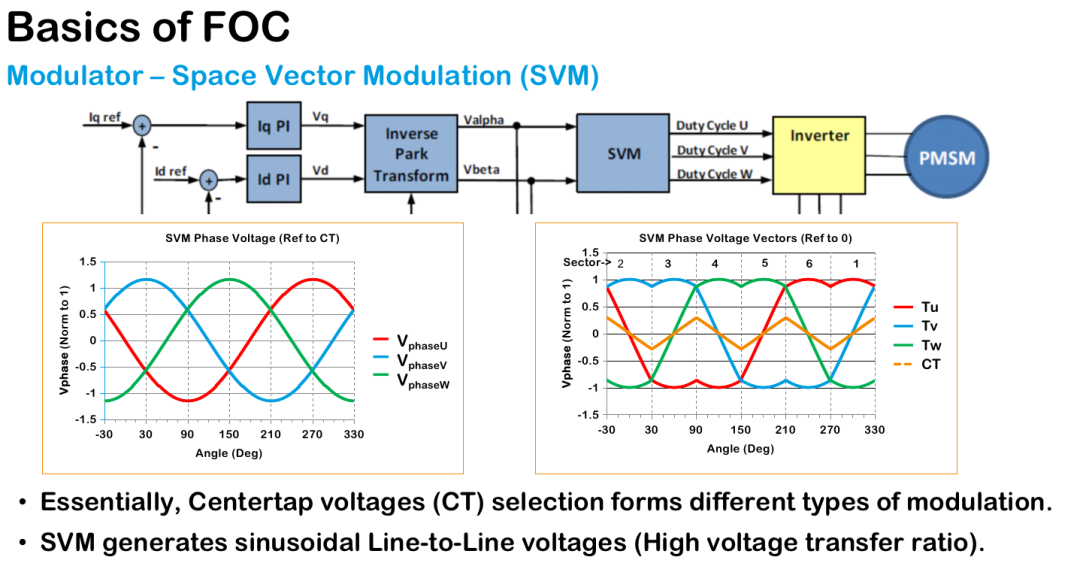
### 2.2 空间矢量脉宽调制(SVPWM)技术
#### 2.2.1 SVPWM的基本原理
空间矢量脉宽调制(Space Vector Pulse Width Modulation,SVPWM)是一种先进的逆变器控制技术,主要用于电机驱动领域。SVPWM的基础理念是使用三个逆变器相输出的矢量组合,形成一个能够控制逆变器输出电压大小和方向的虚拟矢量。
该技术的基本原理是将开关周期内的电压平均分配到三个逆变器相,使得合成的电压矢量更接近圆形,这样可以使得电机在一个开关周期内的能量损耗最小化,电压利用率最大化。通过调制技术控制逆变器开关动作,生成相应形状的PWM波形,以控制电机的运行。
#### 2.2.2 SVPWM的实现方法和应用实例
SVPWM的实现基于对电机定子电压矢量的精确控制。实现SVPWM需要以下步骤:
1. 计算目标电压矢量。
2. 确定最近的三个有效电压矢量。
3. 根据目标电压矢量位置,计算这三个矢量的作用时间。
4. 对于每个开关周期,合理分布开关动作,使得逆变器输出的电压波形逼近理想的电压矢量。
在实际应用中,SVPWM算法的实现需要处理器的高效算法支持,例如利用数字信号处理器(DSP)或者微控制器(MCU)来执行算法。下面是一个简化的代码示例来说明如何计算SVPWM中的基本矢量作用时间。
```c
// SVPWM计算示例代码
void calculateSVPWM(float alpha, float beta) {
// 计算电压矢量角度和幅值
float angle = atan2(beta, alpha);
float magnitude = sqrt(alpha * alpha + beta * beta);
// 确定三个相邻矢量
int sector = sectorNumber(angle);
float T1 = magnitude * sin(PI / 3 - angle);
float T2 = magnitude * sin(angle);
// 计算零矢量作用时间
float T0 = 1.0 - T1 - T2;
// 计算开关时间
float T_a = (2 / 3) * (T2 + T0 / 2);
float T_b = T_a - T1 / sqrt(3);
float T_c = T_a + T1 / sqrt(3);
// 根据矢量作用时间生成PWM信号
// ...
}
// 辅助函数:确定电压矢量所在的扇区
int sectorNumber(float angle) {
// ...
}
```
在上述代码中,alpha 和 beta 分别是电压矢量的直轴和交轴分量,代表空间矢量在静止坐标系中的位置。根据计算出的扇区和矢量分量,计算出每个有效矢量的作用时间。最后,通过调整PWM信号的占空比来控制逆变器,实现对电机的精确控制。
# 3. FOC算法在PMSM电机中的实践应用
## 3.1 FOC算法参数调试和优化
### 3.1.1 参数获取与调试技巧
在实际应用中,参数的准确获取和调试是实现电机高效运行的

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《AN1078 PMSM 电机 FOC 控制中文手册》专栏全面涵盖了 PMSM 电机 FOC 控制的各个方面,从入门到精通,从原理到实践。专栏中的文章深入剖析了 FOC 控制原理,提供了 FOC 算法的实现和优化指南,并解析了常见问题和故障排除技巧。此外,专栏还提供了 AN1078 应用案例分析,展示了如何使用 FOC 提升电机性能。专栏还包括了 FOC 控制的优化全书、实战指南、技术手册、调试与维护指南、策略解读和系统集成指南,为读者提供了全面的知识和实践指导,帮助他们掌握 PMSM 电机 FOC 控制技术,实现高效能、低噪音和稳定的电机运行。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
虚拟串口驱动7.2升级指南:旧版本迁移必看最佳实践

# 摘要
本文针对虚拟串口驱动7.2版本进行全面概述,重点介绍了该版本的新特性和改进,包括核心性能的提升、用户界面的优化以及兼容性和安全性的增强。文中详细阐述了驱动的安装、部署、迁移实践以及应用案例分析,并提供了针对常见问题的技术支持与解决方案。通过实际应用案例展示了新版驱动在不同场景下的迁移策略和问题解决方法,旨在帮助用户更高效地完成驱动升级,确保系统的稳定运行和
数学爱好者必备:小波变换的数学基础与尺度函数深度解析
# 摘要
小波变换作为一种强大的数学工具,在信号处理、图像分析、数据分析等多个领域得到了广泛应用。本文首先介绍小波变换的基本概念和数学理论基础,包括线性代数、傅里
【Surpac脚本高级技巧】:自动化地质数据处理,提升工作效率的黄金法则
# 摘要
本文旨在全面介绍Surpac脚本的基础知识、核心语法、应用实践以及高级技巧。通过对Surpac脚本基础命令、内置函数、数据结构、逻辑控制等方面的深入解析,揭示其在地质数据处理、矿体建模、资源估算等领域的实际应用。文章还着重探讨了脚本编写中的交互性、三维空间分析可视化、模块化复用等高级技术,以及
虚拟局域网(VLAN)深度剖析:网络架构的核心技术
# 摘要
本文全面探讨了虚拟局域网(VLAN)的技术原理、网络架构设计、实践应用案例,以及未来发展展望。首先,概述了VLAN的定义、作用及其工作原理,包括标签协议的标准和配置方法。随后,深入分析了VLAN在不同网络架构设计中的应用,包括设计模型、策略以及安全设计。文章还通过具体案例,展示了VLAN在企业网络和数据中心的应用,以及如何进行故障排查和性能优
射流管式伺服阀设计与应用从零开始
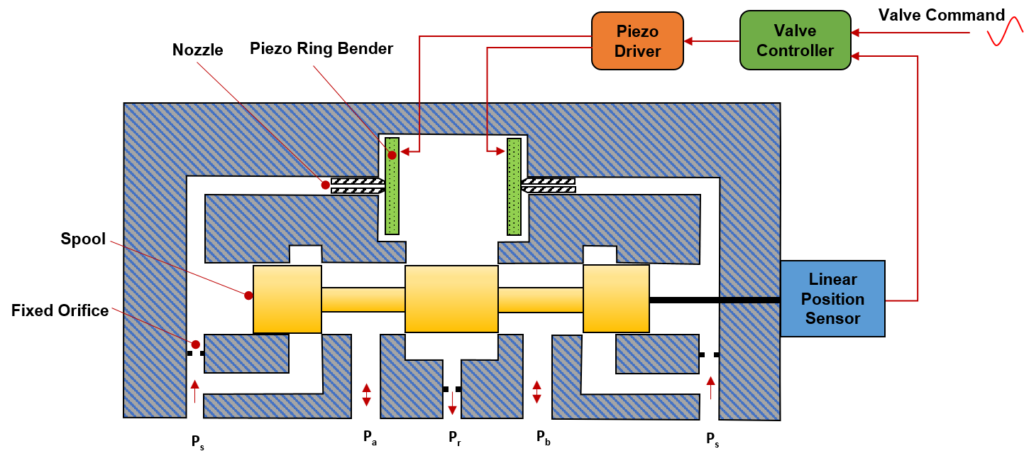
# 摘要
射流管式伺服阀是一种精密的流体控制设备,广泛应用于工业自动化及特种设备领域。本文从理论基础、设计流程、制造与测试以及应用案例等方面对射流管式伺服阀进行了全面介绍。文章首先阐述了伺服阀的流体力学原理和伺服控制理论,然后详细介绍了设计过程中的关键步骤,包括设计参数的确定、射流管的结构优化、材料选择及其对性能的影响。在制造与测试环节,文章探讨了制造工艺、性能测试方法以及
【混沌信号发生器优化】:提升调校效果与性能的终极策略
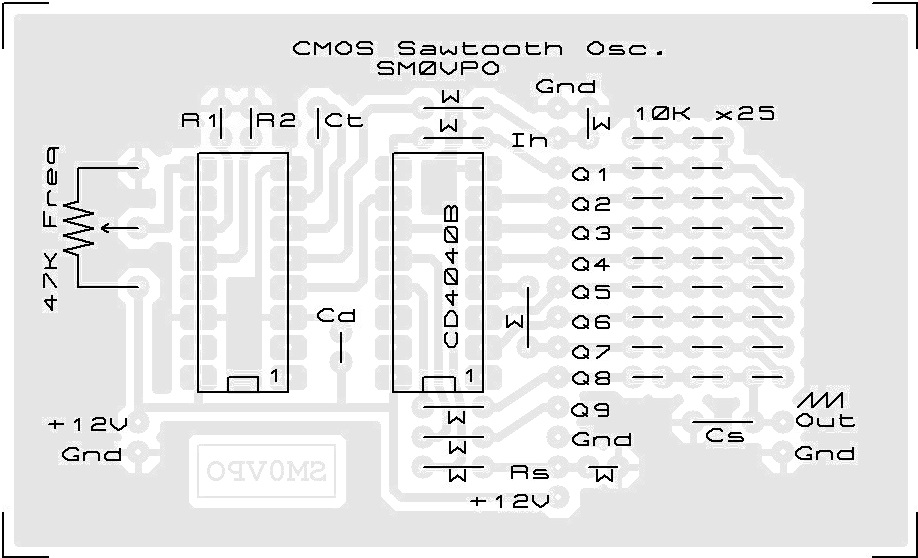
# 摘要
混沌信号发生器作为一种创新技术,在信号处理和通信系统中显示出巨大潜力。本文首先概述混沌信号发生器的概念及其理论基础,深入探讨了混沌现象的定义、混沌系统的模型以及混沌信号的关键参数。随后,文章详细阐述了混沌信号发生器的设计与实现方法,包括硬件和软件的设计要点,并通过实际构建和性能测试来验证其有效性。在混沌信号发生器的优化策略章节中,提出了提升信号质量和增强性能的具体方法。最后,本
【自动化操作录制】:易语言键盘鼠标操作基础教程全解析

# 摘要
随着软件自动化需求的增长,自动化操作录制技术得到了广泛应用。本文首先介绍了自动化操作录制的基本概念,并详细探讨了易语言的环境搭建、基本语法和控制语句。接着,本文深入分析了如何实现键盘和鼠标操作的自动化录制与模拟,并阐述了高级自动化控制技巧,如图像识别与像素操作。进阶章节则针对自动化脚本的调试优化、任务调度以及复杂场景下的应用进行了探讨。最后,通过具体的易语言自动化操作
ROS初探:揭开“鱼香肉丝”包的神秘面纱

# 摘要
本文全面介绍了机器人操作系统(ROS)的基本概念、安装配置、通信机制,以及通过一个实践项目来加深理解。首先,文章简要介绍了ROS的背景和核心概念,为读者提供了对ROS的初步认识。接着,详细阐述了ROS的安装与配置过程,包括必要的系统要求、安装步骤和环境配置测试。第三章深入探讨了ROS节点和话题通信机制,包括节点的生命周期、创建与管理,以及话题发布和订阅的实现。第
GSM信令流程全面解析:网络通信脉络一览无余

# 摘要
GSM网络作为第二代移动通信技术的代表,其信令流程对于网络通信的稳定性和效率至关重要。本文首先介绍了GSM网络通信的基础知识和信令流程的理论基础,然后深入探讨了呼叫控制流程的具体实践和数据传输的信令机制,以及短消息服务(SMS)和移动性管理的信令细节。在信令安全和优化方面,本文阐述了信令加密与认证机制,以及针对信令风暴的控制策略和信令容量管理。最后,本文通过信令分析工具的介绍和应用实例分析,展示了如何在实
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )