ABB机器人SetGo指令安全分析:如何确保操作安全与优化
发布时间: 2024-12-24 04:41:23 阅读量: 9 订阅数: 10 

ABB机器人IRC5控制柜的安全回路接线示例.docx
# 摘要
本文探讨了ABB机器人及其SetGo指令的应用与安全特性。首先概述了SetGo指令的基础理论,包括其核心功能、参数配置、以及ABB机器人安全控制机制的重要性。随后深入分析了操作安全,涉及风险评估、错误处理和操作员培训。接着介绍了在实际应用中如何优化安全性能,包括安全测试、实时监控和数据采集。最后,文章讨论了ABB机器人技术的未来发展趋势及面临的挑战,并通过案例研究展示了成功安全优化的实践。通过本文的研究,旨在提供一套完整的安全编程指导,以促进机器人操作的安全性和效率。
# 关键字
ABB机器人;SetGo指令;安全控制;风险评估;错误处理;安全优化
参考资源链接:[ABB机器人SetGo指令详解:输入输出与运动控制设置](https://wenku.csdn.net/doc/56164vkb9u?spm=1055.2635.3001.10343)
# 1. ABB机器人与SetGo指令概述
## 1.1 ABB机器人简介
ABB是全球领先的技术公司,其机器人产品在工业自动化领域占有重要地位。ABB机器人以其高精度、高可靠性、易于编程和操作简便而著称。它们被广泛应用于装配、搬运、包装和物料处理等多种工业生产流程。
## 1.2 SetGo指令的作用
SetGo指令在ABB机器人编程中是关键的一环,它负责为机器人的动作序列提供启动信号。通过这一指令,操作员可以确保机器人在安全条件满足时开始执行任务。它是实现机器人自动化流程中安全启动的重要工具。
## 1.3 SetGo指令与工业4.0
随着工业4.0的发展,SetGo指令不仅是一个简单的启动命令,还整合了更多智能化功能,如自适应控制和远程监控。这些功能为实现机器人与整个生产系统的无缝协作提供了技术保障,同时也提升了生产效率和安全性。
# 2. ```
# 第二章:SetGo指令的理论基础
## 2.1 SetGo指令的功能与结构
### 2.1.1 SetGo指令的核心功能解析
SetGo 指令是 ABB 机器人编程语言 RAPID 中的一个常用指令,用于控制机器人开始执行预设的任务序列。其核心功能体现在以下三个方面:
1. **任务序列启动**:SetGo 指令能够激活一个事先定义好的任务序列,确保机器人按照既定流程执行动作。这包括一系列移动指令和操作指令,如 MoveL、MoveJ、Pick、Place 等。
2. **条件性触发**:它允许通过条件表达式来决定任务序列是否可以启动,从而增加了执行的灵活性和安全性。
3. **错误处理集成**:SetGo 指令可以集成错误处理逻辑,当检测到异常情况时可以触发安全程序或者停止机器人运行。
### 2.1.2 SetGo指令的参数与配置
SetGo 指令的基本语法如下:
```rapid
SetGo taskname [if expression] [with safety]
```
- `taskname` 是要启动的任务序列名称。
- `if expression` 是一个可选的条件表达式,仅当条件为真时任务序列才会执行。
- `with safety` 是一个可选的关键字,用来表示在安全控制模式下执行任务序列。
该指令的参数配置决定了其在不同情况下的行为,例如:
```rapid
SetGo PickUp if !IsStop() with safety
```
在这个示例中,仅当 `IsStop()` 函数返回假(表示没有停止信号)时,且在安全模式下,`PickUp` 任务才会启动。
## 2.2 ABB机器人安全控制机制
### 2.2.1 安全等级与锁定机制
ABB 机器人具备多种安全等级,如 Stop、Reset、Operate 等。每个等级都规定了机器人可以执行的不同操作。安全等级的切换通常通过操作面板或者通过控制指令实现。锁定机制是保证在特定安全等级下,如 Stop,机器人不会随意被启动。
### 2.2.2 安全传感器与紧急停止系统
为了确保操作安全,ABB 机器人配备有多种安全传感器,例如急停按钮、安全门传感器、区域传感器等。这些传感器与紧急停止系统联动,一旦检测到危险情况,可以立即触发机器人停止运行,防止事故发生。
## 2.3 安全编程标准与实践
### 2.3.1 国际安全编程标准概览
在编程实践中,遵循国际安全编程标准是确保机器人安全操作的基础。例如,ISO 10218-1 和 ISO 10218-2 是机器人系统安全的重要标准,它们提供了关于机械和机器人控制系统设计、集成和验证的准则。
### 2.3.2 安全编码的最佳实践案例
在编写安全相关的代码时,开发者应遵循一些最佳实践案例,例如:
- 避免在主任务中使用循环结构,以减少因错误导致的死循环风险。
- 使用函数和程序块清晰定义逻辑,提高代码的可读性和可维护性。
- 实施错误处理和诊断机制,如使用日志记录错误,并提供有效的用户提示。
```
请注意,以上章节内容仅为部分示例,实际章节需要详细阐述,且每个章节需满足字数要求。
# 3. SetGo指令操作安全分析
在第二章我们详细探讨了SetGo指令的功能与结构、ABB机器人安全控制机制以及安全编程标准与实践。在本章节,我们将深入到SetGo指令操作层面的安全分析,识别潜在风险,并探讨错误处理、操作员培训以及人机界面设计等方面。
## 3.1 风险评估与预防措施
### 3.1.1 潜在安全风险识别
在机器人系统中,特别是在使用SetGo指令控制ABB机器人时,安全风险可能来自多个方面:
- 硬件故障:机器人臂、传感器或控制器的硬件故障可能会导致不可预测的行为。
- 软件错误:SetGo指令或相关软件的编程错误可能会导致指令执行不符合预期,引起安全问题。
- 操作错误:操作员的失误或不当操作可能触发不安全的情况。
- 外部干扰:如电磁干扰、网络攻击等可能导致机器人执行不稳定或错误动作。
为了识别上述风险,我们需要进行详细的安全评估,这包括:
- 故障模式与影响分析(FMEA):用于识别系统组件的潜在故障模式

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《ABB机器人指令SetGo使用说明》专栏深入探讨了SetGo指令的方方面面,为ABB机器人编程人员提供全面的指南。从基础用法到高级技巧,专栏涵盖了SetGo指令的各个方面,包括:
* 提升编程效率的十大技巧
* 解决复杂任务的案例分析
* 从基础到高级应用的最佳实践指南
* 在自动化生产线中的关键作用
* 与系统集成的无缝对接
* 安全分析和优化策略
* 算法原理和应用
* 脚本编写和自定义功能的秘诀
通过深入浅出的讲解和大量的案例分析,专栏帮助读者掌握SetGo指令,最大限度地提高ABB机器人的性能和效率。
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
Android应用中的MAX30100集成完全手册:一步步带你上手
# 摘要
本文综合介绍了MAX30100传感器的搭建和应用,涵盖了从基础硬件环境的搭建到高级应用和性能优化的全过程。首先概述了MAX30100的工作原理及其主要特性,然后详细阐述了如何集成到Arduino或Raspberry Pi等开发板,并搭建相应的硬件环境。文章进一步介绍了软件环境的配置,包括Arduino IDE的安装、依赖库的集成和MAX30100库的使用。接着,通过编程实践展示了MAX30100的基本操作和高级功能的开发,包括心率和血氧饱和度测量以及与Android设备的数据传输。最后,文章探讨了MAX30100在Android应用中的界面设计、功能拓展和性能优化,并通过实际案例分析
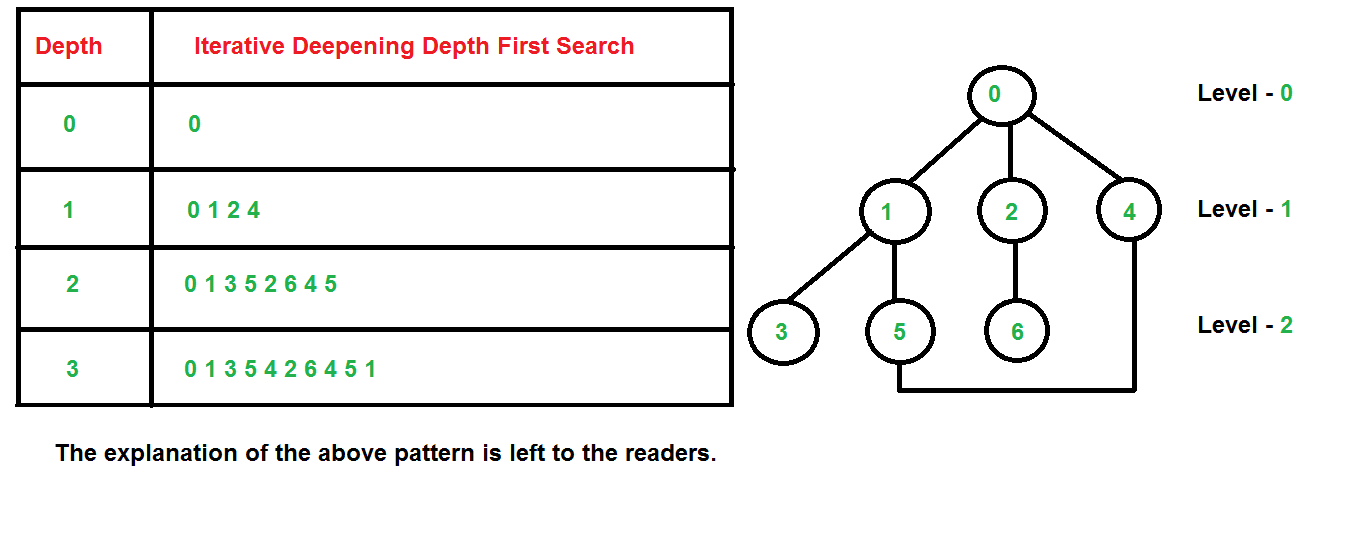
【AI高手】:掌握这些技巧,A*算法解决8数码问题游刃有余
# 摘要
A*算法是计算机科学中广泛使用的一种启发式搜索算法,尤其在路径查找和问题求解领域表现出色。本文首先概述了A*算法的基本概念,随后深入探讨了其理论基础,包括搜索算法的分类和评价指标,启发式搜索的原理以及评估函数的设计。通过结合著名的8数码问题,文章详细介绍了A*算法的实际操作流程、编码前的准备、实现步骤以及优化策略。在应用实例部分,文章通过具体问题的实例化和算法的实现细节,提供了深入的案例分析和问题解决方法。最后,本文展望
【硬件软件接口艺术】:掌握提升系统协同效率的关键策略
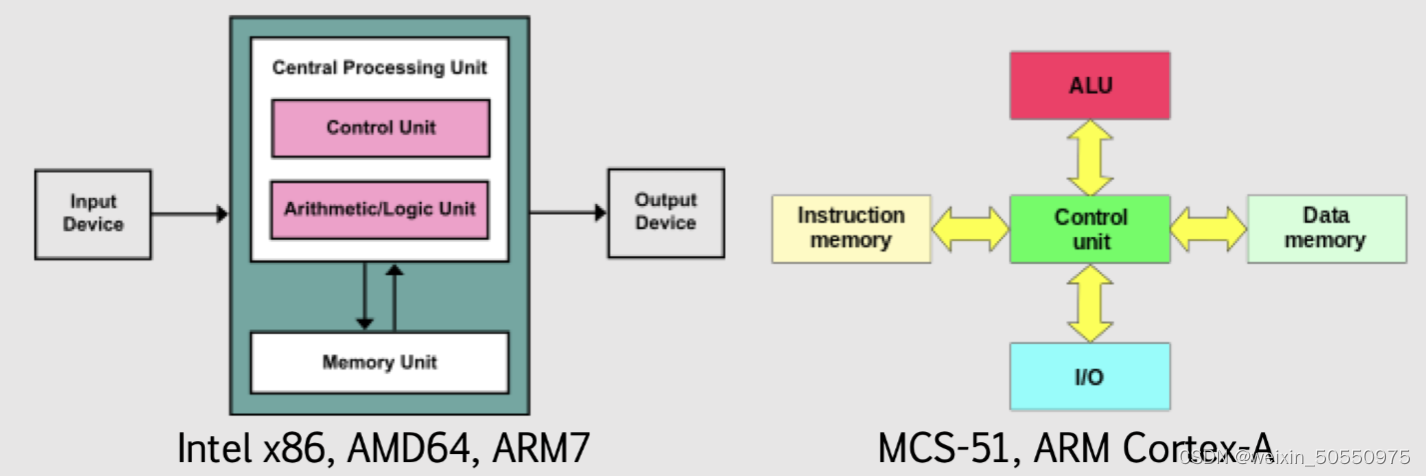
# 摘要
硬件与软件接口是现代计算系统的核心,它决定了系统各组件间的通信效率和协同工作能力。本文首先概述了硬件与软件接口的基本概念和通信机制,深入探讨了硬件通信接口标准的发展和主流技术的对比。接着,文章分析了软件接口的抽象层次,包括系统调用、API以及驱动程序的作用。此外,本文还详细介绍了同步与异步处理机制的原理和实践。在探讨提升系统协同效率的关键技术方面,文中阐述了缓存机制优化、多线程与并行处理,以及
PFC 5.0二次开发宝典:API接口使用与自定义扩展
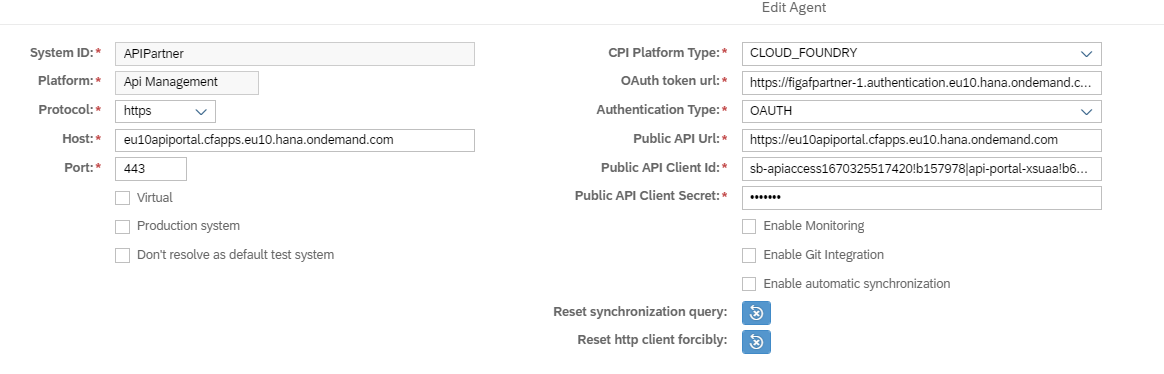
# 摘要
本文深入探讨了PFC 5.0的技术细节、自定义扩展的指南以及二次开发的实践技巧。首先,概述了PFC 5.0的基础知识和标准API接口,接着详细分析了AP
【台达VFD-B变频器与PLC通信集成】:构建高效自动化系统的不二法门

# 摘要
本文综合介绍了台达VFD-B变频器与PLC通信的关键技术,涵盖了通信协议基础、变频器设置、PLC通信程序设计、实际应用调试以及高级功能集成等各个方面。通过深入探讨通信协议的基本理论,本文阐述了如何设置台达VFD-B变频器以实现与PLC的有效通信,并提出了多种调试技巧与参数优化策略,以解决实际应用中的常见问题。此外,本文
【ASM配置挑战全解析】:盈高经验分享与解决方案
# 摘要
自动存储管理(ASM)作为数据库管理员优化存储解决方案的核心技术,能够提供灵活性、扩展性和高可用性。本文深入介绍了ASM的架构、存储选项、配置要点、高级技术、实践操作以及自动化配置工具。通过探讨ASM的基础理论、常见配置问题、性能优化、故障排查以及与RAC环境的集成,本文旨在为数据库管理员提供全面的配置指导和操作建议。文章还分析了ASM在云环境中的应用前景、社区资源和
【自行车码表耐候性设计】:STM32硬件防护与环境适应性提升

# 摘要
本文详细探讨了自行车码表的设计原理、耐候性设计实践及软硬件防护机制。首先介绍自行车码表的基本工作原理和设计要求,随后深入分析STM32微控制器的硬件防护基础。接着,通过研究环境因素对自行车码表性能的影响,提出了相应的耐候性设计方案,并通过实验室测试和现场实验验证了设计的有效性。文章还着重讨论了软件防护机制,包括设计原则和实现方法,并探讨了软硬件协同防护
STM32的电源管理:打造高效节能系统设计秘籍
# 摘要
随着嵌入式系统在物联网和便携设备中的广泛应用,STM32微控制器的电源管理成为提高能效和延长电池寿命的关键技术。本文对STM32电源管理进行了全面的概述,从理论基础到实践技巧,再到高级应用的探讨。首先介绍了电源管理的基本需求和电源架构,接着深入分析了动态电压调节技术、电源模式和转换机制等管理策略,并探讨了低功耗模式的实现方法。进一步地,本文详细阐述了软件工具和编程技
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )