Cocos2d-x物理引擎介绍:实现真实物理效果
发布时间: 2023-12-13 09:05:23 阅读量: 35 订阅数: 50 
# 1. Cocos2d-x物理引擎简介
Cocos2d-x物理引擎是一款基于Cocos2d-x游戏引擎的物理模拟引擎,专门用于游戏开发中的物理效果模拟和实现。它提供了丰富的物理特性和功能,能够帮助开发者轻松实现真实的物理效果,为游戏增添更真实的交互体验。
## 1.1 什么是Cocos2d-x物理引擎
Cocos2d-x物理引擎是Cocos2d-x游戏引擎的附属模块,旨在为游戏开发者提供便捷的物理模拟能力。借助该引擎,开发者可以轻松实现物体的受力、碰撞、摩擦等物理效果,并通过简单的代码控制实现丰富的游戏交互效果。
## 1.2 物理引擎在游戏开发中的重要性
物理引擎在游戏开发中扮演着至关重要的角色。它能够模拟真实世界中物体的运动规律,使得游戏中的角色、道具、场景等元素拥有更加真实的行为表现。通过物理引擎,玩家能够获得更加身临其境的游戏体验,增加游戏的趣味性和挑战性。
## 1.3 Cocos2d-x物理引擎的特点和优势
Cocos2d-x物理引擎具有跨平台性能良好、接口简洁易用、支持多种物理模拟效果等特点。其优势在于能够快速集成到Cocos2d-x游戏引擎中,为游戏开发者提供了灵活、强大的物理效果实现手段,极大地丰富了游戏的表现形式和玩法。
以上是Cocos2d-x物理引擎简介部分的内容,接下来会逐步展开对物理引擎的基础知识讲解和实践操作。
# 2. Cocos2d-x物理引擎基础知识
Cocos2d-x物理引擎是一个用于模拟物理效果的强大工具。在本章节中,我们将介绍Cocos2d-x物理引擎的基础知识,包括刚体、碰撞体和关节的概念,以及物理世界的模拟和触发器的运用。
### 2.1 刚体、碰撞体和关节的概念
#### 2.1.1 刚体
刚体是物理引擎中的一个重要概念,它是一个具有质量和形状的物体。刚体可以受到外力的作用而发生运动,但内部各点之间的相对位置和相对速度保持不变。在Cocos2d-x中,我们可以通过`PhysicsBody`类来创建和管理刚体。
以下是一个使用Cocos2d-x创建刚体的示例代码:
```python
// 创建一个刚体,设置质量和形状
auto sprite = Sprite::create("ball.png");
auto body = PhysicsBody::createCircle(sprite->getContentSize().width / 2);
sprite->setPhysicsBody(body);
// 将刚体添加到场景中
this->addChild(sprite);
```
在这个示例中,我们创建了一个圆形刚体,并将其添加到场景中。可以根据具体的需求,创建不同形状的刚体,比如矩形、多边形等。
#### 2.1.2 碰撞体
碰撞体是刚体上的一个区域,用于检测和响应碰撞事件。在Cocos2d-x中,我们可以给刚体添加一个或多个碰撞体,并设置相应的碰撞参数。
以下是一个给刚体添加碰撞体的示例代码:
```python
auto sprite = Sprite::create("ball.png");
auto body = PhysicsBody::createCircle(sprite->getContentSize().width / 2);
// 创建一个矩形碰撞体
auto collider = PhysicsShapeBox::create(Size(100, 100));
body->addShape(collider);
sprite->setPhysicsBody(body);
this->addChild(sprite);
```
在这个示例中,我们给刚体添加了一个矩形碰撞体。可以根据需要,创建不同形状的碰撞体,并通过`addShape`方法将其添加到刚体上。
#### 2.1.3 关节
关节是用于连接多个刚体的一种特殊机制。通过使用关节,我们可以模拟各种物理效果,比如铰链、齿轮和滑轮等。
以下是一个使用关节连接两个刚体的示例代码:
```python
auto sprite1 = Sprite::create("box.png");
auto sprite2 = Sprite::create("ball.png");
auto body1 = PhysicsBody::createBox(sprite1->getContentSize());
auto body2 = PhysicsBody::createCircle(sprite2->getContentSize().width / 2);
// 创建一个关节,将两个刚体连接起来
auto joint = PhysicsJointPin::construct(body1, body2, Point::ZERO);
Director::getInstance()->getRunningScene()->getPhysicsWorld()->addJoint(joint);
sprite1->setPhysicsBody(body1);
sprite2->setPhysicsBody(body2);
this->addChild(sprite1);
this->addChild(sprite2);
```
在这个示例中,我们创建了一个铰链关节,将一个矩形刚体和一个圆形刚体连接起来。
### 2.2 物理世界的模拟和触发器的运用
#### 2.2.1 物理世界的模拟
Cocos2d-x物理引擎可以模拟一个物理世界,包括物体之间的碰撞和受力等。在使用物理引擎时,我们需要创建一个物理世界,并设置一些参数。
以下是一个创建物理世界的示例代码:
```python
// 创建一个物理世界
auto scene = Scene::createWithPhysics();
auto world = scene->getPhysicsWorld();
// 设置物理世界的重力
world->setGravity(Vec2(0, -98));
// 开启物理世界的调试绘制
world->setDebugDrawMask(PhysicsWorld::DEBUGDRAW_ALL);
```
在这个示例中,我们创建了一个带有物理世界的场景,并设置了重力和调试绘制。
#### 2.2.2 触发器的运用
触发器是一种用于检测碰撞事件的机制。通过使用触发器,我们可以实现各种有趣的游戏效果,比如触发器区域内的物体将执行特定动作等。
以下是一个创建触发器的示例代码:
```python
// 创建一个触发器区域
auto trigger = PhysicsShapeBox::create(Size(200, 200));
trigger->setContactTestBitmask(0x01);
// 监听触发器进入事件
auto listener = EventListenerPhysicsContact::create();
listener->onContactBegin = [](PhysicsContact& contact) {
log("Trigger entered");
return true;
};
Director::getInstance()->getEventDispatcher()->addEventListenerWithSceneGraphPriority(listener, trigger);
```
在这个示例中,我们创建了一个矩形触发器区域,并设置了接触测试掩码。然后,我们通过监听碰撞事件的方式,实现了触发器进入时的逻辑。
### 2.3 物理引擎的数学模型及其在游戏中的应用
Cocos2d-x物理引擎使用了一些数学模型来模拟物理行为。在游戏中,我们可以利用这些数学模型来处理碰撞检测、力的计算等问题。
以下是一些常用的数学模型及其在游戏中的应用:
- 碰撞检测:基于物体的形状和位置,通过数学计算来判断是否发生碰撞。
- 力的计算:通过牛顿定律和万有引力定律等数学模型,计算物体受力和加速度的变化。
- 运动轨迹预测:通过牛顿第二定律和运动学公式等,预测物体的运动轨迹和速度变化。
在游戏开发中,我们可以根据具体需求,灵活运用这些数学模型,实现各种物理效果,比如弹射、引力、摩擦等。
这就是Cocos2d-x物理引擎基础知识的介绍。在接下来的章节中,我们将深入探讨如何使用Cocos2d-x物理引擎实现各种物理效果。
# 3. 使用Cocos2d-x物理引擎实现基本物理效果
#### 3.1 简单物体的受力和运动
在Cocos2d-x物理引擎中,我们可以通过添加力来实现对物体的受力和运动。以下是一个简单的示例代码,演示了如何创建一个受重力影响的物体,并随着时间的推移而下落:
```python
# 创建一个物理世界
physicsWorld = cc.PhysicsWorld()
physicsWorld.setDebugDrawMask(cc.PhysicsWorld.DEBUGDRAW_ALL)
# 创建一个物理引擎场景
scene = cc.Scene()
scene.setPhysicsWorld(physicsWorld)
# 创建一个物理引擎节点
node = cc.Node()
scene.addChild(node)
# 创建一个可受重力影响的物体
sprite = cc.Sprite.create("ball.png")
sprite.setPosition(200, 300)
node.addChild(sprite)
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《Cocos2d-x》专栏是一本全面介绍Cocos2d-x游戏开发的指南。从零开始的游戏开发、创建第一个游戏、场景管理与数据传递、绘制与渲染、动画效果、碰撞检测、音效与音乐处理、用户输入管理、粒子系统与特效、游戏逻辑与流程控制、物理引擎、物体碰撞、场景过渡效果、UI设计与开发、资源管理、网络通信、多人游戏开发、性能优化、手机游戏适配以及跨平台开发等方面全面涵盖。通过阅读该专栏,你将掌握Cocos2d-x游戏开发的核心技术与实践经验,从而可以轻松地创建跨平台的精彩游戏作品。无论你是初学者还是有一定开发经验的开发者,这本专栏都将为你提供宝贵的指导与帮助,让你成为一名出色的Cocos2d-x游戏开发者。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
VisionPro故障诊断手册:网络问题的系统诊断与调试

# 摘要
网络问题诊断与调试是确保网络高效、稳定运行的关键环节。本文从网络基础理论与故障模型出发,详细阐述了网络通信协议、网络故障的类型及原因,并介绍网络故障诊断的理论框架和管理工具。随后,本文深入探讨了网络故障诊断的实践技巧,包括诊断工具与命令、故障定位方法以及
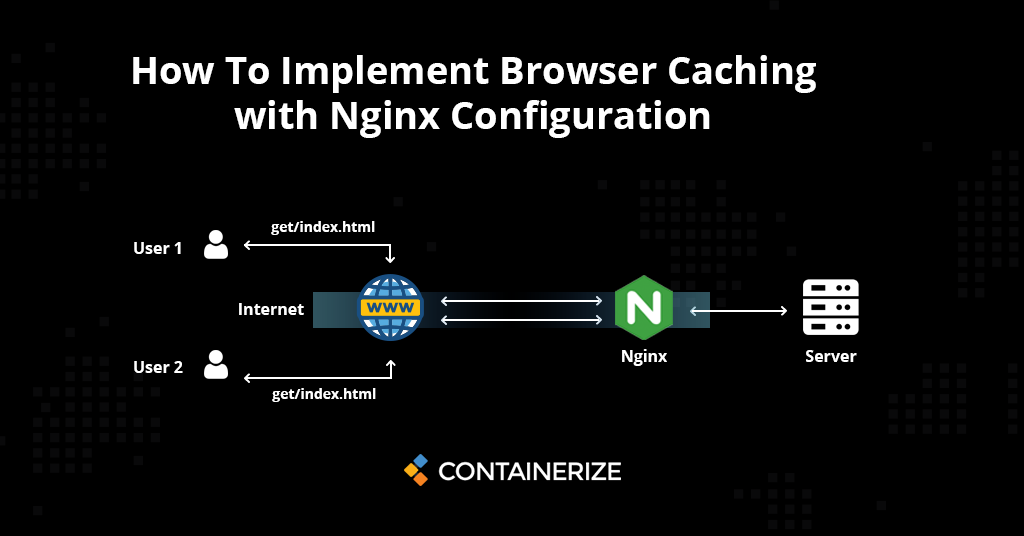
【Nginx负载均衡终极指南】:打造属于你的高效访问入口
.webp)
# 摘要
Nginx作为一款高性能的HTTP和反向代理服务器,已成为实现负载均衡的首选工具之一。本文首先介绍了Nginx负载均衡的概念及其理论基础,阐述了负载均衡的定义、作用以及常见算法,进而探讨了Nginx的架构和关键组件。文章深入到配置实践,解析了Nginx配置文件的关键指令,并通过具体配置案例展示了如何在不同场景下设置Nginx以实现高效的负载分配。
云计算助力餐饮业:系统部署与管理的最佳实践

# 摘要
云计算作为一种先进的信息技术,在餐饮业中的应用正日益普及。本文详细探讨了云计算与餐饮业务的结合方式,包括不同类型和部署模型的云服务,并分析了其在成本效益、扩展性、资源分配和高可用性等方面的优势。文中还提供餐饮业务系统云部署的实践案例,包括云服务选择、迁移策略以及安全合规性方面的考量。进一步地,文章深入讨论了餐饮业务云管理与优化的方法,并通过案例研究展示了云计算在餐饮业中的成功应用。最后,本文对云计算在餐饮业中
【Nginx安全与性能】:根目录迁移,如何在保障安全的同时优化性能
# 摘要
本文对Nginx根目录迁移过程、安全性加固策略、性能优化技巧及实践指南进行了全面的探讨。首先概述了根目录迁移的必要性与准备步骤,随后深入分析了如何加固Nginx的安全性,包括访问控制、证书加密、
RJ-CMS主题模板定制:个性化内容展示的终极指南

# 摘要
本文详细介绍了RJ-CMS主题模板定制的各个方面,涵盖基础架构、语言教程、最佳实践、理论与实践、高级技巧以及未来发展趋势。通过解析RJ-CMS模板的文件结构和继承机制,介绍基本语法和标签使用,本文旨在提供一套系统的方法论,以指导用户进行高效和安全的主题定制。同时,本文也探讨了如何优化定制化模板的性能,并分析了模板定制过程中的高级技术应用和安全性问题。最后,本文展望了RJ-CMS模板定制的
【板坯连铸热传导进阶】:专家教你如何精确预测和控制温度场

# 摘要
本文系统地探讨了板坯连铸过程中热传导的基础理论及其优化方法。首先,介绍了热传导的基本理论和建立热传导模型的方法,包括导热微分方程及其边界和初始条件的设定。接着,详细阐述了热传导模型的数值解法,并分析了影响模型准确性的多种因素,如材料热物性、几何尺寸和环境条件。本文还讨论了温度场预测的计算方法,包括有限差分法、有限元法和边界元法,并对温度场控制技术进行了深入分析。最后,文章探讨了温度场优化策略、
【性能优化大揭秘】:3个方法显著提升Android自定义View公交轨迹图响应速度
# 摘要
本文旨在探讨Android自定义View在实现公交轨迹图时的性能优化。首先介绍了自定义View的基础知识及其在公交轨迹图中应用的基本要求。随后,文章深入分析了性能瓶颈,包括常见性能问题如界面卡顿、内存泄漏,以及绘制过程中的性能考量。接着,提出了提升响应速度的三大方法论,包括减少视图层次、视图更新优化以及异步处理和多线程技术应用。第四章通过实践应用展示了性能优化的实战过程和
Python环境管理:一次性解决Scripts文件夹不出现的根本原因

# 摘要
本文系统地探讨了Python环境的管理,从Python安装与配置的基础知识,到Scripts文件夹生成和管理的机制,再到解决环境问题的实践案例。文章首先介绍了Python环境管理的基本概念,详细阐述了安装Python解释器、配置环境变量以及使用虚拟环境的重要性。随
通讯录备份系统高可用性设计:MySQL集群与负载均衡实战技巧

# 摘要
本文探讨了通讯录备份系统的高可用性架构设计及其实际应用。首先对MySQL集群基础进行了详细的分析,包括集群的原理、搭建与配置以及数据同步与管理。随后,文章深入探讨了负载均衡技术的原理与实践,及其与MySQL集群的整合方法。在此基础上,详细阐述了通讯录备份系统的高可用性架构设计,包括架构的需求与目标、双活或多活数据库架构的构建,以及监
【20分钟精通MPU-9250】:九轴传感器全攻略,从入门到精通(必备手册)

# 摘要
本文对MPU-9250传感器进行了全面的概述,涵盖了其市场定位、理论基础、硬件连接、实践应用、高级应用技巧以及故障排除与调试等方面。首先,介绍了MPU-9250作为一种九轴传感器的工作原理及其在数据融合中的应用。随后,详细阐述了传感器的硬件连
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )