深入理解单片机程序设计变量规划:数据结构与算法选择
发布时间: 2024-07-11 07:45:01 阅读量: 56 订阅数: 22 

数据结构与算法设计分析
# 1. 单片机程序设计变量规划概述
变量规划是单片机程序设计中的关键环节,它决定了程序的效率、稳定性和可维护性。单片机资源有限,对变量的规划尤为重要。本章将概述单片机程序设计中变量规划的原则和方法,为后续章节的深入探讨奠定基础。
**变量规划的原则**
* **最小化变量数量:**变量越多,程序占用内存越大,执行效率越低。
* **优化变量类型:**根据变量的取值范围和使用场景选择合适的类型,避免浪费内存。
* **控制变量作用域:**限制变量的作用域,避免不必要的变量冲突和内存泄漏。
* **优化变量存储:**使用内存池、动态内存分配等技术优化变量存储,提高内存利用率。
# 2. 数据结构选择与应用
### 2.1 数组和链表
#### 2.1.1 数组的基本概念和操作
**数组**是一种数据结构,它将相同类型的数据元素存储在连续的内存空间中。每个元素都有一个唯一的索引,用于访问该元素。数组的优点是访问速度快,因为可以根据索引直接定位元素。
**基本操作:**
- **创建数组:**`int arr[10];` 创建一个包含 10 个整数的数组。
- **访问元素:**`arr[5]` 访问数组中索引为 5 的元素。
- **修改元素:**`arr[5] = 10;` 将索引为 5 的元素修改为 10。
- **遍历数组:**使用 for 循环或迭代器遍历数组中的所有元素。
#### 2.1.2 链表的结构和应用
**链表**是一种数据结构,它将数据元素存储在不连续的内存空间中。每个元素包含数据和指向下一个元素的指针。链表的优点是插入和删除元素的速度快,因为不需要移动其他元素。
**基本结构:**
```
struct Node {
int data;
Node* next;
};
```
**基本操作:**
- **创建链表:**`Node* head = new Node{10, nullptr};` 创建一个包含一个元素的链表。
- **插入元素:**`head = insert(head, 5);` 在链表开头插入一个值为 5 的元素。
- **删除元素:**`head = delete(head, 5);` 删除链表中值为 5 的元素。
- **遍历链表:**使用 while 循环或迭代器遍历链表中的所有元素。
### 2.2 栈和队列
#### 2.2.1 栈的基本原理和应用
**栈**是一种遵循后进先出 (LIFO) 原则的数据结构。元素被存储在栈顶,新元素被压入栈顶,旧元素被弹出栈顶。栈的优点是操作简单,易于实现。
**基本操作:**
- **压栈:**`push(stack, 10);` 将 10 压入栈中。
- **弹栈:**`pop(stack);` 弹出栈顶元素。
- **栈顶元素:**`peek(stack);` 获取栈顶元素。
- **栈是否为空:**`isEmpty(stack);` 检查栈是否为空。
#### 2.2.2 队列的基本原理和应用
**队列**是一种遵循先进先出 (FIFO) 原则的数据结构。元素被存储在队列尾,新元素被插入队列尾,旧元素被从队列头移除。队列的优点是公平调度,保证元素的顺序性。
**基本操作:**
- **入队:**`enqueue(queue, 10);` 将 10 入队。
- **出队:**`dequeue(queue);` 出队队列头元素。
- **队头元素:**`front(queue);` 获取队头元素。
- **队列是否为空:**`isEmpty(queue);` 检查队列是否为空。
### 2.3 树和图
#### 2.3.1 树的基本概念和遍历算法
**树**是一种数据结构,它将数据元素组织成一个层次结构。每个元素有一个父元素和多个子元素。树的优点是查询和遍历速度快,适用于层次化数据。
**基本概念:**
- **根节点:**树的顶层元素。
- **叶节点:**没有子元素的元素。
- **深度:**从根节点到叶节点的最长路径长度。
**遍历算法:**
- **前序遍历:**先访问根节点,再前序遍历左子树,最后前序遍历右子树。
- **中序遍历:**先中序遍历左子树,再访问根节点,最后中序遍历右子树。
- **后序遍历:**先后序遍历左子树,再后序遍历右子树,最后访问根节点。
#### 2.3.2 图的基本概念和搜索算法
**图**是一种数据结构,它将数据元素组织成一个由节点和边组成的网络。图的优点是表示复杂关系,适用于网络和社交网络等场景。
**基本概念:**
- **节点:**图中的数据元素。
- **边:**连接两个节点的线段。
- **权重:**边的权重表示两个节点之间的距离或成本。
**搜索算法:**
- **深度优先搜索 (DFS):**从一个节点开始,沿着一条路径深度搜索,直到到达叶节点,然后回溯并探索其他路径。
- **广度优先搜索 (BFS):**从一个节点开始,广度搜索所有相邻节点,然后再搜索相邻节点的相邻节点,以此类推。
# 3.1 排序算法
排序算法是计算机科学中一个重要的基础算法,用于将一组数据按特定顺序排列。单片机程序设计中,排序算法的应用场景广泛,例如:
- 数据管理:对设备状态、传感器数据等进行排序,便于快速查找和处理。
- 数据分析:对采集到的数据进行排序,以便进行统计分析和趋势预测。
- 数据展示:对数据进行排序,以便以可视化方式呈现,如柱状图、折线图等。
常用的排序算法包括:
#### 3.1.1 冒泡排序和快速排序
**冒泡排序**是一种简单的排序算法,其原理是逐一对相邻元素进行比较,将较大的元素向后移动,直到所有元素按从小到大排列。
```c
void bubble_sort(int *arr, int len) {
for (int i = 0; i < len - 1; i++) {
for (int j = 0; j < len - 1 - i; j++) {
if (arr[j] > arr[j + 1]) {
int temp = arr[j];
arr[j] = arr[j + 1];
arr[j + 1] = temp;
}
}
}
}
```
**快速排序**是一种高效的排序算法,其原理是将待排序数组划分为两个子数组,然后分别对子数组进行排序,最后合并子数组。
```c
void quick_sort(int *arr, int low, int high) {
if (low < high) {
int pivot = arr[high];
int i = low - 1;
for (int j = low; j < high; j++) {
if (arr[j] <= pivot) {
i++;
int temp = arr[i];
arr[i] = arr[j];
arr[j] = temp;
}
}
int new_pivot = i + 1;
arr[high] = arr[new_pivot];
arr[new_pivot] = pivot;
quick_sort(arr, low, new_pivot - 1);
quick_sort(arr, new_pivot + 1, high);
}
}
```
#### 3.1.2 归并排序和堆排序
**归并排序**是一种稳定的排序算法,其原理是将待排序数组划分为若干个子数组,然后对子数组进行递归排序,最后合并子数组。
```c
void merge_sort(int *arr, int low, int high) {
if (low < high) {
int mid = (low + high) / 2;
merge_sort(arr, low, mid);
merge_sort(arr, mid + 1, high);
merge(arr, low, mid, high);
}
}
void merge(int *arr, int low, int mid, int high) {
int *temp = malloc((high - low + 1) * sizeof(int));
int i = low, j = mid + 1, k = 0;
while (i <= mid && j <= high) {
if (arr[i] <= arr[j]) {
temp[k++] = arr[i++];
} else {
temp[k++] = arr[j++];
}
}
while (i <= mid) {
temp[k++] = arr[i++];
}
while (j <= high) {
temp[k++] = arr[j++];
}
for (int i = low; i <= high; i++) {
arr[i] = temp[i - low];
}
free(temp);
}
```
**堆排序**是一种基于堆数据结构的排序算法,其原理是将待排序数组构建成一个堆,然后依次从堆顶弹出元素,并将其插入到数组的末尾。
```c
void heap_sort(int *arr, int len) {
build_heap(arr, len);
for (int i = len - 1; i >= 1; i--) {
int temp = arr[0];
arr[0] = arr[i];
arr[i] = temp;
heapify(arr, i, 0);
}
}
void build_heap(int *arr, int len) {
for (int i = len / 2 - 1; i >= 0; i--) {
heapify(arr, len, i);
}
}
void heapify(int *arr, int len, int i) {
int largest = i;
int left = 2 * i + 1;
int right = 2 * i + 2;
if (left < len && arr[left] > arr[largest]) {
largest = left;
}
if (right < len && arr[right] > arr[largest]) {
largest = right;
}
if (largest != i) {
int temp = arr[i];
arr[i] = arr[largest];
arr[largest] = temp;
heapify(arr, len, largest);
}
}
```
# 4. 变量规划与存储管理
### 4.1 变量类型和内存分配
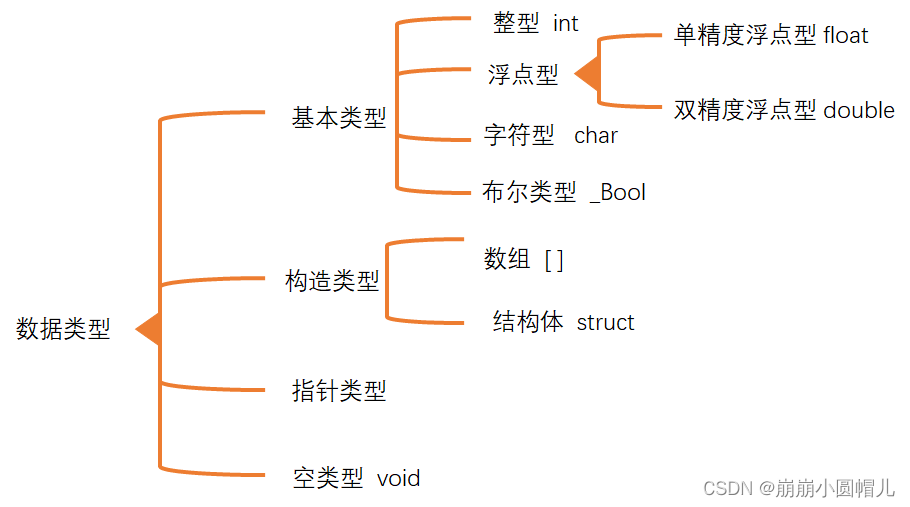
#### 4.1.1 整数、浮点数和字符类型
单片机中常用的变量类型包括整数、浮点数和字符类型。
* **整数类型**:用于存储整数,包括有符号和无符号类型,如 `int`、`short`、`long` 等。
* **浮点数类型**:用于存储浮点数,如 `float`、`double` 等。
* **字符类型**:用于存储单个字符,如 `char`。
变量的类型决定了它在内存中占用的空间大小。例如,在大多数单片机中,`int` 类型占 2 个字节,`float` 类型占 4 个字节,`char` 类型占 1 个字节。
#### 4.1.2 内存分配机制和指针的使用
单片机中的内存通常分为数据区和代码区。数据区用于存储变量和常量,而代码区用于存储程序代码。
变量在数据区中分配内存空间。当声明一个变量时,编译器会根据变量的类型和大小为其分配相应的内存空间。
指针是一种变量,它存储另一个变量的地址。通过指针,可以间接访问另一个变量的值或地址。
### 4.2 变量作用域和生命周期
#### 4.2.1 局部变量和全局变量
单片机程序中的变量可以分为局部变量和全局变量。
* **局部变量**:在函数或块中声明的变量,只在该函数或块内有效。
* **全局变量**:在函数或块外声明的变量,在整个程序中有效。
局部变量的作用域仅限于其所在的函数或块,而全局变量的作用域覆盖整个程序。
#### 4.2.2 变量的生命周期和内存回收
变量的生命周期是指变量从声明到释放的过程。
局部变量的生命周期与函数或块的生命周期一致,当函数或块执行完毕后,局部变量将被释放。
全局变量的生命周期与整个程序的生命周期一致,在程序执行期间一直存在。
单片机中没有自动内存回收机制,因此需要手动释放不再使用的变量以避免内存泄漏。
### 4.3 变量优化和存储管理
#### 4.3.1 减少变量数量和优化变量类型
减少变量数量和优化变量类型可以节省内存空间和提高代码效率。
* **减少变量数量**:避免声明不必要的变量,可以将多个同类型变量合并为一个数组或结构体。
* **优化变量类型**:根据变量的实际取值范围选择合适的变量类型,避免使用过大的变量类型。
#### 4.3.2 使用内存池和动态内存分配
内存池是一种预先分配的内存区域,用于存储动态分配的变量。使用内存池可以避免频繁的内存分配和释放操作,提高内存利用率。
动态内存分配允许在程序运行时动态分配内存空间。可以通过 `malloc()` 和 `free()` 函数进行动态内存分配和释放。
# 5. 单片机程序设计变量规划实践
### 5.1 数据结构和算法的实际应用
#### 5.1.1 链表管理设备列表
链表是一种非连续的线性数据结构,其元素在内存中不是连续存储的。每个元素都包含数据和指向下一个元素的指针。链表非常适合管理设备列表,因为可以轻松地添加、删除和插入设备。
**代码块:**
```c
typedef struct device {
char *name;
int id;
struct device *next;
} device_t;
device_t *head = NULL;
void add_device(char *name, int id) {
device_t *new_device = malloc(sizeof(device_t));
new_device->name = name;
new_device->id = id;
new_device->next = NULL;
if (head == NULL) {
head = new_device;
} else {
device_t *current = head;
while (current->next != NULL) {
current = current->next;
}
current->next = new_device;
}
}
void remove_device(int id) {
if (head == NULL) {
return;
}
device_t *current = head;
device_t *previous = NULL;
while (current != NULL) {
if (current->id == id) {
if (previous == NULL) {
head = current->next;
} else {
previous->next = current->next;
}
free(current);
return;
}
previous = current;
current = current->next;
}
}
void print_devices() {
device_t *current = head;
while (current != NULL) {
printf("%s (%d)\n", current->name, current->id);
current = current->next;
}
}
```
**逻辑分析:**
* `add_device()` 函数创建一个新设备并将其添加到链表的末尾。
* `remove_device()` 函数通过遍历链表并比较设备 ID 来删除设备。
* `print_devices()` 函数遍历链表并打印每个设备的名称和 ID。
#### 5.1.2 栈实现递归算法
栈是一种后进先出(LIFO)的数据结构。它就像一叠盘子,每次只能从栈顶添加或删除元素。栈非常适合实现递归算法,因为可以轻松地跟踪函数调用。
**代码块:**
```c
#include <stdio.h>
#include <stdlib.h>
typedef struct node {
int data;
struct node *next;
} node_t;
node_t *top = NULL;
void push(int data) {
node_t *new_node = malloc(sizeof(node_t));
new_node->data = data;
new_node->next = top;
top = new_node;
}
int pop() {
if (top == NULL) {
return -1;
}
int data = top->data;
node_t *temp = top;
top = top->next;
free(temp);
return data;
}
int factorial(int n) {
if (n == 0) {
return 1;
}
push(n);
int result = n * factorial(n - 1);
pop();
return result;
}
int main() {
int n = 5;
int result = factorial(n);
printf("Factorial of %d is %d\n", n, result);
return 0;
}
```
**逻辑分析:**
* `push()` 函数将元素压入栈顶。
* `pop()` 函数从栈顶弹出元素。
* `factorial()` 函数使用栈来实现递归算法。它将当前值压入栈中,然后调用自身并递减值。当值达到 0 时,它开始弹出值并计算阶乘。
### 5.2 变量规划与优化案例
#### 5.2.1 优化图像处理算法的内存使用
图像处理算法通常需要处理大量数据,这可能会导致内存问题。通过优化变量规划,可以减少算法的内存使用。
**优化前:**
```c
int main() {
int width = 1024;
int height = 768;
int image[width][height];
// ...
}
```
**优化后:**
```c
int main() {
int width = 1024;
int height = 768;
int *image = malloc(width * height * sizeof(int));
// ...
}
```
**优化分析:**
在优化前,图像数据存储在一个二维数组中,这需要大量的连续内存。在优化后,图像数据存储在动态分配的内存中,这允许算法根据需要分配和释放内存。
#### 5.2.2 减少变量数量提升代码可读性
过多的变量会使代码难以阅读和维护。通过减少变量数量,可以提高代码的可读性和可维护性。
**优化前:**
```c
int main() {
int a = 10;
int b = 20;
int c = 30;
int d = 40;
int e = 50;
// ...
}
```
**优化后:**
```c
int main() {
int a = 10;
int b = a + 10;
int c = b + 10;
int d = c + 10;
int e = d + 10;
// ...
}
```
**优化分析:**
在优化前,代码使用五个变量来存储五个不同的值。在优化后,代码使用两个变量(`a` 和 `b`)来存储相同的值,从而减少了变量数量。
# 6.1 单片机程序设计变量规划的重要性
变量规划是单片机程序设计中的关键环节,对程序的性能、稳定性和可维护性有着至关重要的影响。
**1. 性能优化**
合理的变量规划可以有效减少内存占用和提高程序执行效率。例如,使用适当的数据结构(如链表或数组)可以优化内存分配,避免内存碎片化;使用局部变量可以减少全局变量的访问次数,提高程序运行速度。
**2. 稳定性保障**
变量规划不当容易导致程序崩溃或异常。例如,未初始化的变量可能包含垃圾值,导致程序运行不稳定;变量重用可能导致数据覆盖,造成程序错误。
**3. 可维护性提升**
清晰的变量规划有助于提高代码的可读性和可维护性。通过使用有意义的变量名、注释和适当的变量作用域,可以使程序更容易理解和维护。
## 6.2 未来变量规划的发展趋势
随着单片机技术的发展,变量规划也在不断演进,以下是一些未来趋势:
**1. 自动变量规划**
人工智能技术的发展将推动自动变量规划工具的出现,这些工具可以根据程序的特性自动生成最佳的变量规划方案。
**2. 动态变量管理**
动态变量管理技术将允许程序在运行时动态调整变量的分配和释放,从而提高内存利用率和程序性能。
**3. 异构变量规划**
随着单片机系统变得越来越复杂,异构变量规划将变得更加重要。异构变量规划是指在不同的内存区域(如SRAM、Flash、EEPROM)分配不同类型的变量,以优化性能和成本。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
“单片机程序设计变量规划”专栏深入探讨了单片机程序设计中变量规划的方方面面,旨在帮助程序员优化代码性能、提升效率和可维护性。专栏内容涵盖了变量规划的艺术、实战案例、陷阱和解决方案、数据结构和算法选择、性能优化技巧、高级技术(如动态内存分配和指针使用)、调试和测试、最佳实践、案例研究、代码重用技巧、团队协作、自动化工具、教育和培训、职业发展、行业认证、开源资源、在线课程和书籍推荐。通过全面深入的讲解,该专栏为单片机程序员提供了宝贵的知识和实践指导,帮助他们掌握变量规划的精髓,提升代码质量和开发效率。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
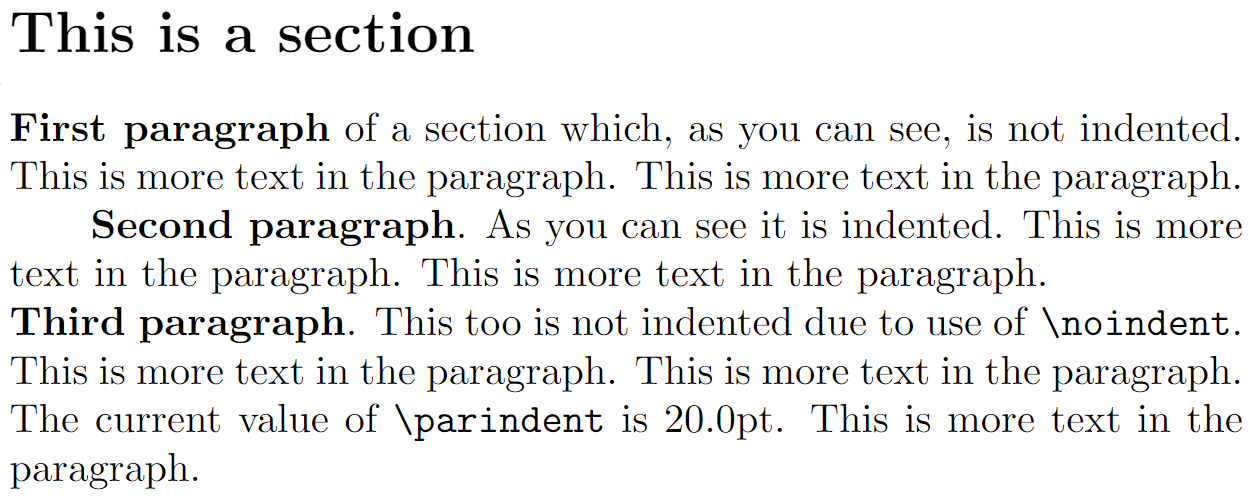
Overleaf高级排版秘籍:版式设计与优化的10大策略
# 摘要
本文全面介绍了Overleaf在线LaTeX编辑器的使用方法和排版技术,涵盖了从基础排版原则到高级排版技术以及优化调试的各个方面。第一章提供了一个快速的入门指南,使读者能够掌握Overleaf的基本操作和排版基础知识。在第二章中,本文深入探讨了版式设计原则,包括视觉引导元素的运用、版面比例的安排、字体选择的技巧以及图文结合的策略。第三章介绍了
煤矿风险评估:实时地质数据分析的精准预测与应对

# 摘要
煤矿风险评估是一个复杂的过程,它涉及到实时地质数据的采集、处理、风险评估模型的构建以及实时风险预测与决策支持系统的实现。本文系统介绍了煤矿地质风险评估的理论基础、地质数据采集与处理技术、风险评估模型的开发与优化方法。文章重点分析了实时风险预测系统的架
【Python并发编程】:列表在多线程与多进程中的高级应用

# 摘要
本文系统性地介绍了Python中并发编程的基础知识、多线程和多进程编程的深入应用,以及在高级并发技巧和性能调优方面的实践经验。通过对线程和进程的生命周期管理、同步机制、资源访问控制,以及进程间通信方法的研究,探讨了在并发环境下处理共享资源时的线程安全和进程安全问题。文章进一步分析了并发模型的
微信群聊自动化秘籍:AutoJs脚本开发与性能优化指南

# 摘要
微信群聊自动化技术近年来随着移动互联网的发展而兴起,本文首先概述了AutoJs及其在微信群聊自动化中的应用。接着,介绍了AutoJs脚本的基础知识,包括环境搭建、语言基础和核心组件的操作方法。本文深入探讨了通过AutoJs实现微信群消息监控、管理自动化以及用户体验增强的实战演练。针对脚本性能优化,本文提出了调试技巧、性
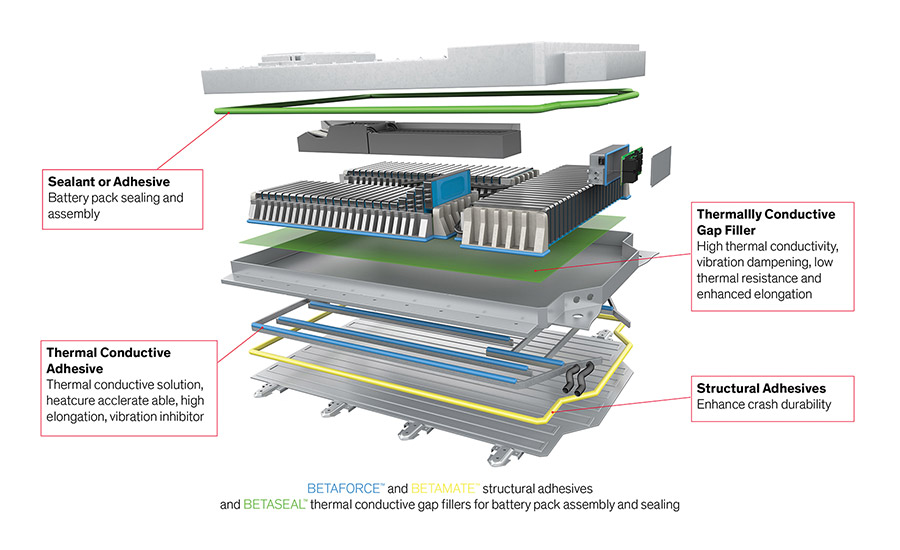
TB5128热管理专家:有效散热与防过热的7大策略
# 摘要
本文详细探讨了热管理的基础知识、硬件散热方法、被动与主动散热技术、智能散热系统、以及TB5128热管理专家的应用案例和未来发展方向。文中分析了散热器、风扇、热界面材料等硬件组件的作用及技术参数,探讨了不同散热方法的效率与策略,并讨论了智能散热系统构建、监控软件运用及故障诊断与维护的重要性。通过对TB5128在不同行业中的应用案例研究,本文评估了其
Windows用户指南:PyTorch安装完全解决方案,兼容性无忧(兼容性大师)

# 摘要
本文旨在介绍PyTorch框架,涵盖其简介、优势、环境搭建、实践应用以及常见问题解决与优化。PyTorch作为深度学习领域广泛使用的开源库,因其灵活性和易用性被开发者青睐。文章详细介绍了系统兼容性分析、安装方法和版本管理,为读者提供了多种配置PyTorch环境的指导。通过实践与应用章节,
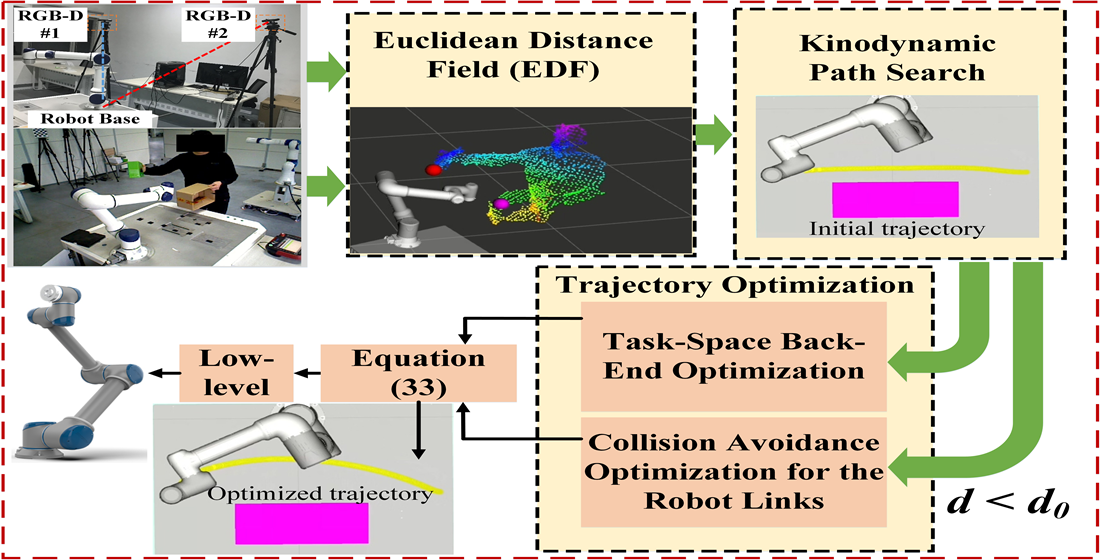
【KST_WorkVisual_40_zh进阶教程】:解锁高效机器人脚本编写秘诀
# 摘要
本文详细介绍了KST_WorkVisual_40_zh的基本概念、结构设计、高级功能实现以及调试与维护。首先,对KST_WorkVisual_40_zh的基础知识进行了全面的概述。接着,深入分析了机器人脚本的结构和逻辑设计,包括其基本框架、模块划分、功能区、逻辑流、执行逻辑
MPLAB XC16多线程编程:同步资源,提升并行处理效率
# 摘要
MPLAB XC16多线程编程提供了复杂系统中任务并行处理的能力,但其成功实施依赖于对线程同步机制的深刻理解。本文首先概述了多线程编程的基本概念,随后详细探讨了线程同步的关键技术,如互斥锁、信号量和事件。通过案例分析,本文识别了常见同步问题并提出了最佳实践。在实
RDA5876 设计避雷指南:电路设计常见错误及解决方案

# 摘要
本文对RDA5876芯片的电路设计进行了全面概述,包括其应用背景、设计基础、常见错误分析以及优化策略。文中详细阐述了电路设计的基本原则,RDA5876芯片的特性和
【ArcGIS地图投影选择】:正确应用地图投影的专家指南
# 摘要
地图投影作为地理信息系统中的核心基础,是确保准确空间分析和数据表现的关键技术。本文首先介绍了地图投影的基础知识,随后深入探讨了ArcGIS投影系统的核心组件,包括投影系统的分类、特点,以及ArcGIS中坐标系统和投影变换的原理与方法。第三章通过实际案例阐述了如何根据地理区域和地图用途在ArcGIS中选择合适的投影,并介绍了高级投影操作的实践。最后,本文分析了地图投影变换与分析
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )