STM32HAL库终极指南:掌握15项关键技能,解锁MCU编程
发布时间: 2024-12-03 01:31:11 阅读量: 4 订阅数: 6 
参考资源链接:[STM32CubeMX与STM32HAL库开发者指南](https://wenku.csdn.net/doc/6401ab9dcce7214c316e8df8?spm=1055.2635.3001.10343)
# 1. STM32 HAL库概述
## 1.1 STM32微控制器与HAL库介绍
STM32微控制器是STMicroelectronics公司生产的一系列基于ARM Cortex-M内核的32位微控制器。这些控制器被广泛应用于工业控制、消费电子、汽车电子等多个领域。HAL库,全称为硬件抽象层(Hardware Abstraction Layer)库,是ST公司为STM32微控制器提供的一个软件接口层,它为硬件提供了标准化的编程接口,允许开发者在不同系列的STM32产品之间进行移植和代码重用。
## 1.2 HAL库的优势与应用场景
HAL库的优势在于它提供了一种硬件无关的编程方式。这意味着,开发者在使用HAL库编程时可以专注于算法实现,而不必深入了解特定硬件的细节。这大大加快了开发速度,并提高了代码的可移植性。HAL库适用于需要快速开发原型和产品的企业环境,特别是对于拥有多种硬件平台的公司,使用HAL库可以简化跨平台开发和维护。
## 1.3 开发环境搭建与配置
搭建STM32 HAL库的开发环境通常涉及到安装和配置以下工具:
1. **STM32CubeMX**:这是一个图形化配置工具,用于生成初始化代码,配置外设和时钟等。
2. **IDE (集成开发环境)**:推荐使用Keil uVision、IAR、STM32CubeIDE或者System Workbench等。
3. **ST-Link驱动程序**:确保与STMicroelectronics的调试器/编程器的兼容性。
在完成这些工具的安装之后,需要对它们进行适当的配置。例如,在Keil uVision中,需要指定设备型号、配置调试器设置,并添加HAL库文件到项目中。通过这些步骤,您就可以开始创建和编译基于HAL库的项目了。
# 2. ```
# 第二章:掌握STM32 HAL库基础操作
在本章节中,我们将深入探讨STM32 HAL库的基础操作,这些操作是构建任何STM32应用的基石。从GPIO的操作管理到定时器的应用,再到模拟信号的ADC和DAC转换,我们将一一展开介绍。具体来说,本章节将分为三个主要部分,每个部分都会详细描述其在HAL库中的实现和使用方法。
## 2.1 GPIO的操作与管理
### 2.1.1 GPIO模式与配置
通用输入输出(GPIO)端口是微控制器中用途最为广泛的接口之一。在HAL库中,对GPIO的操作和管理被封装成一系列函数和宏定义,以便于开发者快速配置和使用这些端口。
配置GPIO模式是首要步骤,可以通过调用`HAL_GPIO_Init()`函数来实现。以下代码展示了如何将一个引脚配置为推挽输出模式:
```c
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* 配置GPIO结构体 */
GPIO_InitStruct.Pin = GPIO_PIN_0; // 指定要配置的引脚
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; // 设置模式为推挽输出
GPIO_InitStruct.Pull = GPIO_NOPULL; // 不使用上下拉
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; // 设置引脚速度
/* 初始化GPIO */
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
```
在上述代码中,`GPIO_InitTypeDef`结构体用于定义GPIO配置参数。其中`Pin`成员指定GPIO引脚,`Mode`成员定义引脚的模式,`Pull`定义引脚的上下拉配置,而`Speed`定义信号传输速率。通过这种方式,开发者可以根据实际需要配置GPIO的工作模式。
### 2.1.2 GPIO的中断处理
中断是一种重要的微控制器事件处理方式。在HAL库中,GPIO可以配置为中断输入,当引脚状态发生特定变化时触发中断服务函数(ISR)。
下面是一个GPIO中断配置和处理的简单示例:
```c
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin) {
// 当GPIO_PIN_0的状态发生变化时,会调用此函数
if (GPIO_Pin == GPIO_PIN_0) {
// 在这里处理中断事件
}
}
int main(void) {
HAL_Init();
// ...其他初始化代码...
/* 配置GPIO为中断模式 */
GPIO_InitStruct.Pin = GPIO_PIN_0;
GPIO_InitStruct.Mode = GPIO_MODE_IT_FALLING; // 下降沿触发
GPIO_InitStruct.Pull = GPIO_PULLUP; // 使用上拉
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* 使能中断 */
HAL_NVIC_SetPriority(EXTI0_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(EXTI0_IRQn);
/* ...其他代码... */
while (1) {
// 主循环代码
}
}
```
在此示例中,`HAL_GPIO_EXTI_Callback()`是一个中断回调函数,在引脚状态发生变化时由HAL库调用。通过调用`HAL_GPIO_Init()`配置GPIO的中断模式,再通过`HAL_NVIC_SetPriority()`和`HAL_NVIC_EnableIRQ()`设置中断优先级和使能中断。这样配置后,每当GPIO_PIN_0检测到下降沿时,就会触发中断并执行回调函数。
在中断处理中,我们通常会编写代码来响应硬件事件,比如读取传感器数据或更新LED状态。正确的配置和使用中断可以极大提升程序的响应性和效率。
## 2.2 定时器的应用
### 2.2.1 基本定时器功能的实现
STM32的定时器是一类强大的外设,可以用于生成精确的时间延迟、脉冲波形或进行输入/输出计数。HAL库中的定时器配置和使用都非常方便,下面是一个创建基本定时器并启动的示例代码:
```c
TIM_HandleTypeDef htim1;
void MX_TIM1_Init(void) {
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
htim1.Instance = TIM1;
htim1.Init.Prescaler = 0; // 预分频器,决定时钟频率
htim1.Init.CounterMode = TIM_COUNTERMODE_UP; // 向上计数模式
htim1.Init.Period = 0xFFFF; // 自动重装载值
htim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1; // 时钟分频因子
htim1.Init.RepetitionCounter = 0; // 重复计数器
HAL_TIM_Base_Init(&htim1);
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
HAL_TIM_ConfigClockSource(&htim1, &sClockSourceConfig);
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
HAL_TIMEx_MasterConfigSynchronization(&htim1, &sMasterConfig);
}
int main(void) {
HAL_Init();
SystemClock_Config(); // 配置系统时钟
MX_TIM1_Init(); // 初始化定时器
/* 启动定时器 */
HAL_TIM_Base_Start(&htim1);
while (1) {
// 主循环代码
}
}
```
在这段代码中,`MX_TIM1_Init()`函数配置了定时器的基本参数,包括预分频器、计数模式、自动重装载值等。通过调用`HAL_TIM_Base_Init()`初始化定时器,使用`HAL_TIM_ConfigClockSource()`设置定时器的时钟源。最后,通过调用`HAL_TIM_Base_Start()`启动定时器。
定时器的启动意味着它将按照给定的时钟和参数开始计数。这可以用于多种场合,如生成准确的延时、定时执行任务等。
### 2.2.2 PWM输出与输入捕获
除了基本计时功能,定时器还常用作脉冲宽度调制(PWM)的输出,或是对脉冲信号进行捕获和测量。例如,我们可以使用定时器的通道来生成PWM波形,并通过调节占空比来控制电机速度或其他设备。
PWM波形生成可以通过设置定时器的通道模式为PWM模式并配置相应的参数来实现:
```c
TIM_OC_InitTypeDef sConfigOC = {0};
htim1.Instance = TIM1;
htim1.Init.Prescaler = 0;
htim1.Init.CounterMode = TIM_COUNTERMODE_UP;
htim1.Init.Period = 999; // PWM周期
htim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim1.Init.RepetitionCounter = 0;
HAL_TIM_PWM_Init(&htim1);
sConfigOC.OCMode = TIM_OCMODE_PWM1; // PWM模式1
sConfigOC.Pulse = 499; // PWM占空比(499/999)
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH; // 输出极性高
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_1);
/* 启动PWM */
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1);
```
在该代码中,`sConfigOC`结构体配置了PWM参数,包括PWM模式、脉冲宽度和输出极性。通过调用`HAL_TIM_PWM_Init()`初始化PWM功能,然后通过`HAL_TIM_PWM_ConfigChannel()`和`HAL_TIM_PWM_Start()`设置PWM通道并启动PWM输出。
通过以上步骤,你可以利用STM32定时器的PWM功能来实现对电机速度的控制或者LED灯的调光等应用。
同时,定时器也可以作为输入捕获,用于测量外部信号的频率和周期,例如将传感器的脉冲输出连接到定时器输入捕获通道,通过软件分析这些脉冲来获得传感器数据。
## 2.3 ADC与DAC数据转换
### 2.3.1 ADC的基本使用方法
模数转换器(ADC)是用于将模拟信号转换成数字信号的组件,而STM32的ADC通过HAL库实现更加直观易用。以下是一个ADC初始化并读取数据的简单示例:
```c
ADC_HandleTypeDef hadc1;
void MX_ADC1_Init(void) {
ADC_ChannelConfTypeDef sConfig = {0};
hadc1.Instance = ADC1;
hadc1.Init.ScanConvMode = ADC_SCAN_DISABLE;
hadc1.Init.ContinuousConvMode = DISABLE;
hadc1.Init.DiscontinuousConvMode = DISABLE;
hadc1.Init.ExternalTrigConv = ADC_SOFTWARE_START;
hadc1.Init.DataAlign = ADC_DATAALIGN_RIGHT;
hadc1.Init.NbrOfConversion = 1;
HAL_ADC_Init(&hadc1);
sConfig.Channel = ADC_CHANNEL_0;
sConfig.Rank = 1;
sConfig.SamplingTime = ADC_SAMPLETIME_1CYCLE_5;
HAL_ADC_ConfigChannel(&hadc1, &sConfig);
}
int main(void) {
HAL_Init();
MX_ADC1_Init();
/* 启动ADC */
HAL_ADC_Start(&hadc1);
while (1) {
// 主循环代码
if (HAL_ADC_PollForConversion(&hadc1, 1000) == HAL_OK) {
uint32_t adcValue = HAL_ADC_GetValue(&hadc1);
// 使用adcValue进行后续处理
}
}
}
```
在该代码中,`MX_ADC1_Init()`函数负责初始化ADC1。通过设置`ADC_ChannelConfTypeDef`结构体配置ADC通道的参数,并调用`HAL_ADC_Init()`对ADC进行初始化。然后配置特定的ADC通道通过`HAL_ADC_ConfigChannel()`函数。
在主循环中,调用`HAL_ADC_Start()`启动ADC转换,并使用`HAL_ADC_PollForConversion()`轮询检查转换是否完成。一旦转换完成,便通过`HAL_ADC_GetValue()`函数读取ADC的转换结果值。
ADC的使用对于读取各种传感器数据(如温度、光强、压力等)至关重要,它为数字世界和现实世界之间的沟通架起了桥梁。
### 2.3.2 DAC输出的配置与应用
数字模拟转换器(DAC)则相反,用于将数字信号转换为模拟信号。STM32的DAC外设通过HAL库也非常易于配置和使用。
以下是如何配置DAC并输出连续的模拟信号的示例代码:
```c
DAC_HandleTypeDef hdac;
void MX_DAC_Init(void) {
DAC_ChannelConfTypeDef sConfig = {0};
hdac.Instance = DAC_CHANNEL_1;
HALDAC_Init(&hdac);
sConfig.DAC_Trigger = DAC_TRIGGER_NONE;
sConfig.DAC_OutputBuffer = DAC_OUTPUTBUFFER_ENABLE;
HAL_DAC_ConfigChannel(&hdac, &sConfig, DAC_CHANNEL_1);
}
int main(void) {
HAL_Init();
MX_DAC_Init();
/* 设置DAC输出值并启动 */
HAL_DAC_Start(&hdac, DAC_CHANNEL_1);
HAL_DAC_SetValue(&hdac, DAC_CHANNEL_1, DAC_ALIGN_12B_R, 0xFFF); // 设置为最大值0xFFF
while (1) {
// 主循环代码
}
}
```
在这段代码中,`MX_DAC_Init()`函数负责初始化DAC1通道,通过`DAC_ChannelConfTypeDef`结构体配置DAC通道的相关参数。使用`HALDAC_Init()`初始化DAC,然后通过`HAL_DAC_ConfigChannel()`配置通道。之后,使用`HAL_DAC_Start()`启动DAC,并通过`HAL_DAC_SetValue()`设置DAC输出值。
通过DAC,我们可以生成不同类型的模拟信号,如正弦波、锯齿波等,这在音响设备和模拟测试设备中非常有用。
以上就是第二章“掌握STM32 HAL库基础操作”的内容。本章深入讲解了STM32的GPIO操作、定时器应用、以及ADC和DAC数据转换的使用。读者应该能够通过本章内容,掌握STM32 HAL库的基础操作,从而在后续章节中进一步学习更进阶的功能。
```
# 3. 深入理解STM32 HAL库编程技巧
## 3.1 中断与异常处理
### 中断优先级配置
STM32微控制器在运行过程中需要处理各种紧急事件,中断是响应这些事件的主要机制。在使用STM32 HAL库编程时,合理配置中断优先级是确保系统稳定性和响应效率的关键。
```c
void HAL_NVIC_SetPriority(IRQn_Type IRQn, uint32_t PreemptPriority, uint32_t SubPriority);
```
此函数用于设置指定中断的优先级。`IRQn` 为中断号,`PreemptPriority` 为抢占优先级,`SubPriority` 为子优先级。STM32的中断优先级可以配置为4位抢占优先级和4位子优先级,因此范围为0-15。优先级数值越小,优先级越高。
```c
// 设置定时器中断的优先级为最高
HAL_NVIC_SetPriority(TIMx_IRQn, 0x00, 0x00);
```
### 外部中断与中断回调函数
外部中断允许外部事件(如按钮按下或传感器信号变化)触发中断服务程序(ISR)。在HAL库中,外部中断通过回调函数机制实现。
```c
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin);
```
当特定的GPIO引脚产生外部中断时,`HAL_GPIO_EXTI_Callback` 函数会被调用。在这个回调函数中,开发者可以编写处理中断的代码。例如:
```c
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
if(GPIO_Pin == USER_BUTTON_PIN)
{
// 执行按键按下时的处理代码
}
}
```
在该函数中,首先需要确认中断源,然后进行相应的处理。
### 3.1.1 中断优先级配置的深入分析
中断优先级的配置应考虑到系统的实时性要求。高优先级的中断可能会抢占低优先级的中断,而具有相同优先级的中断则根据他们的子优先级来决定响应顺序。
### 3.1.2 外部中断与中断回调函数的优化方法
外部中断回调函数中不宜进行过于复杂的处理,因为这会增加中断响应的延时。通常,复杂逻辑应放在非中断上下文中处理,比如在主循环中或者使用DMA来处理。
## 3.2 低功耗模式的配置与管理
### 睡眠模式与唤醒机制
STM32微控制器支持多种低功耗模式,包括睡眠模式、停机模式等。进入低功耗模式是降低功耗、延长电池使用寿命的重要手段。
```c
void HAL_PWR_EnterSLEEPMode(PWR_MAINREGULATOR_ON, PWR_SLEEPENTRY_WFI);
```
该函数用于将MCU置于睡眠模式,参数`PWR_MAINREGULATOR_ON`表示主调节器保持开启,`PWR_SLEEPENTRY_WFI`表示通过等待中断(WFI)指令进入睡眠模式。
```c
// 睡眠前配置
HAL_PWR_EnterSLEEPMode(PWR_MAINREGULATOR_ON, PWR_SLEEPENTRY_WFI);
// 在唤醒后的处理
// ...
```
### 低功耗模式下的外设管理
低功耗模式下,并非所有外设都会停止工作。一些外设,如RTC或外部中断,仍可以配置为唤醒MCU。
```c
void HAL_PWR_EnableWakeUpPin(uint32_t WakeUpPin);
```
此函数配置外部引脚作为唤醒源。如需在特定引脚上升沿唤醒MCU:
```c
// 配置PC.13作为唤醒引脚
HAL_PWR_EnableWakeUpPin(PWR WakeUpPin_13);
```
### 3.2.1 睡眠模式与唤醒机制的深入分析
睡眠模式下MCU的功耗可以大幅降低,但是需要特别注意的是,一些外设的状态在进入低功耗模式前需要进行保存,以免丢失数据。
### 3.2.2 低功耗模式下的外设管理的优化方法
对于低功耗模式下的外设管理,应尽量将外设配置为低功耗状态,在需要的时候再唤醒外设执行任务。此外,合理使用唤醒源可以减少不必要的功耗。
## 3.3 实时时钟RTC的使用
### RTC的初始化与时间设置
实时时钟(RTC)模块为微控制器提供了时间跟踪能力,适用于需要实时数据记录的应用。
```c
void RTC_Init(void);
```
```c
// RTC初始化代码示例
void RTC_Init(void)
{
// 其他初始化代码
// ...
}
```
RTC模块初始化后,可以设置时间和日期:
```c
RTC_TimeTypeDef sTime = {0};
RTC_DateTypeDef sDate = {0};
// 时间设置
sTime.Hours = 0x10;
sTime.Minutes = 0x15;
sTime.Seconds = 0x00;
// 日期设置
sDate.WeekDay = RTC_WEEKDAY_TUESDAY;
sDate.Month = RTC_MONTH_AUGUST;
sDate.Date = 0x11;
sDate.Year = 0x21;
// 设置时间和日期
HAL_RTC_SetTime(&hrtc, &sTime, RTC_FORMAT_BCD);
HAL_RTC_SetDate(&hrtc, &sDate, RTC_FORMAT_BCD);
```
### RTC报警与时间戳功能
RTC模块还支持设置报警和时间戳功能,这对于需要定时任务的应用场景尤为重要。
```c
// 设置RTC报警
RTC_AlarmTypeDef sAlarm = {0};
sAlarm.AlarmTime.Hours = 0x10;
sAlarm.AlarmTime.Minutes = 0x15;
sAlarm.AlarmTime.Seconds = 0x00;
sAlarm.Alarm = RTC_ALARM_A;
sAlarm.AlarmDateWeekDaySel = RTC_ALARMDATEWEEKDAYSEL_DATE;
sAlarm.AlarmDateWeekDay = 0x11;
// 配置报警并使能
HAL_RTC_SetAlarm_IT(&hrtc, &sAlarm, RTC_FORMAT_BCD);
```
### 3.3.1 RTC的初始化与时间设置的深入分析
在初始化RTC时,应该确保RTC模块的时钟源已正确配置。此外,设置时间和日期时需注意日期和星期的正确性和合法性。
### 3.3.2 RTC报警与时间戳功能的优化方法
在进行RTC报警设置时,应考虑到系统的实时性,选择适合的中断处理方式。时间戳功能有助于记录事件发生的精确时间,可用于事后分析。
[本章节结束]
继续编写剩余章节,请根据上述示例及要求逐章进行。
# 4. STM32 HAL库进阶功能探索
## 4.1 DMA传输机制
### 4.1.1 DMA的基本原理与配置
直接内存访问(DMA)允许外设直接访问系统内存,绕过了CPU,从而减少了处理器的负担。在STM32微控制器中,DMA被广泛用于高效的数据传输,特别是在处理高速外设(如ADC、DAC、USART等)时。
在使用DMA之前,需要对其进行正确配置,包括源地址、目标地址、传输数据长度、传输方向、DMA通道优先级、传输完成中断等。以下是配置DMA的基本步骤:
1. 启用DMA时钟。
2. 初始化DMA通道。
3. 设置DMA源地址和目标地址。
4. 配置传输方向和数据宽度。
5. 设置传输大小。
6. 配置DMA循环模式、中断等。
7. 启动DMA传输。
下面是一个配置DMA通道的基本示例代码:
```c
#include "stm32f1xx_hal.h"
// 初始化DMA通道,假设使用的是DMA1流5通道7
void MX_DMA_Init(void)
{
DMA_ChannelConfTypeDef sConfig = {0};
// 启用DMA时钟
__HAL_RCC_DMA1_CLK_ENABLE();
// 填充DMA初始化结构体
sConfig.Channel = DMA_CHANNEL_7; // 通道7
sConfig.Direction = DMA_MEMORY_TO_MEMORY; // 内存到内存传输
sConfig.PeriphInc = DMA_PINC_ENABLE; // 外设地址自增
sConfig.MemInc = DMA_MINC_ENABLE; // 内存地址自增
sConfig.PeriphDataAlignment = DMA_PDATAALIGN_BYTE; // 外设数据宽度8位
sConfig.MemDataAlignment = DMA_MDATAALIGN_BYTE; // 内存数据宽度8位
sConfig.Mode = DMA_NORMAL; // 普通模式
sConfig.Priority = DMA_PRIORITY_LOW; // 优先级低
// 初始化DMA通道
HAL_DMA_Init(DMA1_Channel7);
}
int main(void)
{
// HAL库初始化
HAL_Init();
// 配置系统时钟
SystemClock_Config();
// 初始化DMA
MX_DMA_Init();
// 以下代码省略...
}
```
### 4.1.2 DMA在内存与外设间的高效传输
在配置好DMA后,可以实现内存与外设之间大量数据的高效传输,这对音视频流处理、高速ADC数据采集、外设数据缓存等场景非常有用。
以一个例子说明如何使用DMA传输ADC数据到内存:
```c
uint32_t adc_value_array[ADC_BUFFER_LENGTH]; // 存储ADC数据的数组
// ADC配置代码省略...
// 开始DMA传输
HAL_ADC_Start_DMA(&hadc1, adc_value_array, ADC_BUFFER_LENGTH);
// 等待传输完成
HAL_Delay(1000);
// 停止DMA传输
HAL_ADC_Stop_DMA(&hadc1);
// 处理ADC数据
for (int i = 0; i < ADC_BUFFER_LENGTH; i++) {
// TODO: 处理adc_value_array中的数据
}
```
在这个例子中,我们配置了ADC的数据传输到一个预先定义好的数组中。使用`HAL_ADC_Start_DMA()`函数启动DMA传输,传输完成后,可以对数组中的数据进行处理。通过DMA,处理器可以继续执行其他任务,而无需等待数据传输完成,从而提高了整体性能。
## 4.2 通信协议的HAL库实现
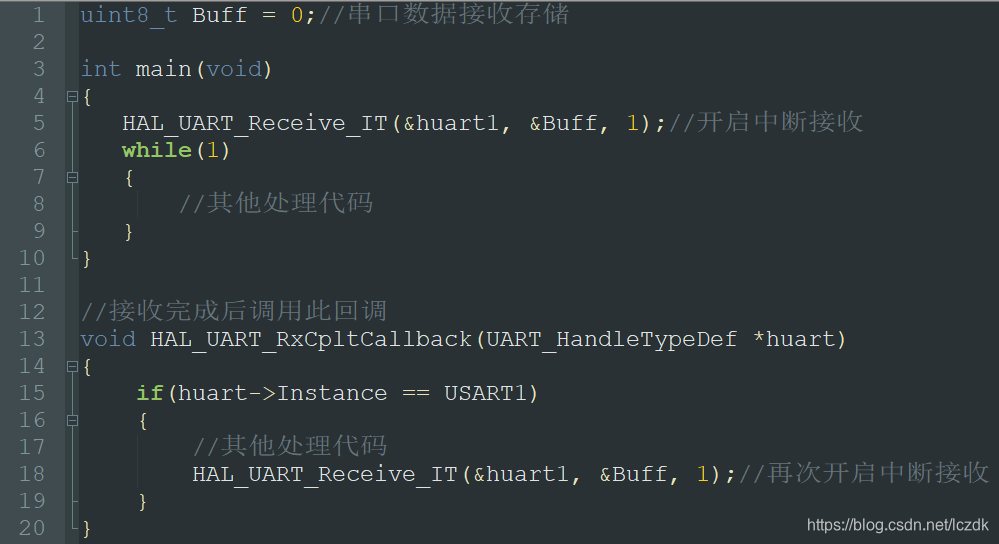
### 4.2.1 UART通信的实现
通用异步收发传输器(UART)是微控制器与外部设备进行串行通信的常用方式。HAL库提供了简单的方法来初始化和使用UART外设。
下面是一个UART配置和发送接收数据的示例代码:
```c
UART_HandleTypeDef huart2;
void MX_USART2_UART_Init(void)
{
huart2.Instance = USART2;
huart2.Init.BaudRate = 115200;
huart2.Init.WordLength = UART_WORDLENGTH_8B;
huart2.Init.StopBits = UART_STOPBITS_1;
huart2.Init.Parity = UART_PARITY_NONE;
huart2.Init.Mode = UART_MODE_TX_RX;
huart2.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart2.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart2) != HAL_OK)
{
Error_Handler();
}
}
void UART_SendString(UART_HandleTypeDef *huart, char *str)
{
HAL_UART_Transmit(huart, (uint8_t *)str, strlen(str), 100);
}
void UART_ReceiveString(UART_HandleTypeDef *huart, char *buffer, int buffer_size)
{
HAL_UART_Receive(huart, (uint8_t *)buffer, buffer_size, 100);
}
int main(void)
{
// HAL库初始化
HAL_Init();
// 配置系统时钟
SystemClock_Config();
// 初始化UART
MX_USART2_UART_Init();
// 发送字符串
UART_SendString(&huart2, "Hello, UART!\r\n");
// 接收字符串
char buffer[100];
UART_ReceiveString(&huart2, buffer, sizeof(buffer));
// 主循环代码省略...
}
```
在这个例子中,我们初始化了USART2的UART接口,设置了波特率、字长、停止位等参数,并定义了发送和接收字符串的函数。使用这些函数可以轻松实现UART的基本通信任务。
### 4.2.2 I2C与SPI通信协议的应用
I2C和SPI也是微控制器常见的两种通信协议。HAL库同样提供了一套相对简单的API来配置和使用这两种通信协议。
以下是一个基本的I2C和SPI初始化和使用示例:
```c
I2C_HandleTypeDef hi2c1;
SPI_HandleTypeDef hspi1;
void MX_I2C1_Init(void)
{
// I2C初始化代码省略...
}
void MX_SPI1_Init(void)
{
// SPI初始化代码省略...
}
void I2C_SendData(I2C_HandleTypeDef *hi2c, uint8_t* data, uint16_t size)
{
HAL_I2C_Master_Transmit(hi2c, I2C_ADDRESS, data, size, 1000);
}
void SPI_SendData(SPI_HandleTypeDef *hspi, uint8_t* data, uint16_t size)
{
HAL_SPI_Transmit(hspi, data, size, 1000);
}
int main(void)
{
// HAL库初始化
HAL_Init();
// 配置系统时钟
SystemClock_Config();
// 初始化I2C
MX_I2C1_Init();
// 初始化SPI
MX_SPI1_Init();
// 发送数据
uint8_t data[] = {0xAA, 0xBB, 0xCC};
I2C_SendData(&hi2c1, data, sizeof(data));
SPI_SendData(&hspi1, data, sizeof(data));
// 主循环代码省略...
}
```
在这个例子中,我们定义了发送数据的函数`I2C_SendData`和`SPI_SendData`,分别用于I2C和SPI通信。通过调用这些函数,我们可以轻松地实现I2C和SPI的数据传输功能。
## 4.3 调试与性能优化
### 4.3.1 HAL库调试技巧
在使用STM32 HAL库进行开发时,调试是必不可少的步骤。HAL库提供了一些调试技巧和工具,可以帮助开发者更快地定位和解决问题。
- 使用`HAL_Delay`函数进行延时,帮助观察外设的行为和系统状态的变化。
- 利用HAL库提供的状态和错误代码进行条件检查,例如`if(huart2.State == HAL_UART_STATE_READY)`。
- 使用`HAL_GetTick()`函数获取系统运行时间,用于时间序列分析和性能评估。
- 利用断言(assertions)来检测和定位问题,例如`assert(huart2.ErrorCode == HAL_UART_ERROR_NONE);`。
- 使用串口打印调试信息,例如`printf("Status: 0x%X\r\n", huart2.State);`。
- 使用集成开发环境(IDE)的调试功能,如步进、断点、监视表达式等。
### 4.3.2 性能瓶颈分析与优化方法
在完成项目开发后,性能瓶颈分析和优化是一个重要的步骤。通过以下方法,可以找到并解决性能问题:
- **分析功耗**:利用STM32CubeMX和STM32CubeMonitor工具分析系统功耗,并优化电源管理。
- **代码分析**:使用性能分析工具,例如STM32CubeIDE中的分析工具,检查代码执行时间和资源使用情况。
- **外设配置优化**:调整外设配置参数,以减少不必要的中断和轮询操作,优化DMA使用。
- **硬件升级**:如果软件优化达到极限,可以考虑升级硬件平台以提升性能。
- **并行处理**:在多核微控制器上使用CMSIS-NN等库进行神经网络运算,实现并行计算。
```mermaid
graph LR
A[性能瓶颈分析] --> B[功耗分析]
A --> C[代码分析]
A --> D[外设配置优化]
A --> E[硬件升级]
A --> F[并行处理]
```
通过以上优化方法,可以在确保代码稳定性和系统可靠性的基础上,提高系统的整体性能。
在本章节中,我们深入探索了STM32 HAL库的DMA传输机制、通信协议的实现以及调试与性能优化技巧。DMA传输机制减轻了处理器负担,提高了数据传输效率;通过HAL库实现的UART、I2C和SPI通信协议,简化了外设通信过程;调试技巧和性能优化方法帮助我们快速定位问题并提升系统性能。这些知识点的综合应用,可以显著提升项目的稳定性和执行效率,是STM32开发中不可或缺的高级技能。
# 5. 实践案例:基于HAL库的项目开发
在这一章节中,我们将通过三个具体的项目案例来展示如何使用STM32 HAL库进行实际的项目开发。这些案例将涉及硬件选择、软件编程以及调试优化的全过程,帮助读者从实践中深化对HAL库的理解和应用。
## 5.1 项目案例一:LED灯控制程序
### 5.1.1 硬件设计与连接
本项目使用STM32F103C8T6微控制器(俗称“蓝丁板”)来控制一个LED灯的亮灭。首先,需要连接好LED灯到微控制器的一个GPIO输出引脚上。在这个案例中,我们将使用板载的LED灯,其连接到GPIO端口B的第0号引脚(记为PB0)。
硬件连接非常简单,只需要将LED的正极连接到PB0,负极通过限流电阻接地即可。限流电阻的计算可以按照LED的额定电流来设定,例如,如果LED的额定电流为20mA,电阻为330欧姆,则限流电阻可以设定为330欧姆。
### 5.1.2 HAL库编程实现
下面的代码展示了如何使用STM32 HAL库来编写一个简单的程序,控制LED灯亮一秒,灭一秒循环。
```c
#include "stm32f1xx_hal.h"
// 初始化函数
void HAL_MspInit(void)
{
__HAL_RCC_GPIOB_CLK_ENABLE(); // 启用GPIOB时钟
GPIO_InitTypeDef GPIO_InitStruct = {0};
// 配置GPIOB的第0号引脚为输出模式
GPIO_InitStruct.Pin = GPIO_PIN_0;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
int main(void)
{
HAL_Init(); // 初始化HAL库
HAL_MspInit(); // 初始化GPIOB
while (1)
{
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_SET); // 点亮LED
HAL_Delay(1000); // 延时1000毫秒
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_RESET); // 熄灭LED
HAL_Delay(1000); // 延时1000毫秒
}
}
```
该代码首先定义了初始化函数`HAL_MspInit`用于配置GPIOB的第0号引脚,并将其设置为推挽输出模式。在主函数`main`中,使用`HAL_GPIO_WritePin`函数来控制LED灯的状态,并使用`HAL_Delay`函数来实现延时。
## 5.2 项目案例二:温湿度传感器数据采集
### 5.2.1 传感器选择与集成
在本项目中,我们使用DHT11温湿度传感器来采集环境的温度和湿度数据。DHT11是一款含有已校准数字信号输出的温湿度传感器。它应用专用的数字模块采集技术和温湿度测量技术,确保产品具有高可靠性和卓越的长期稳定性。
首先,将DHT11的数据线连接到STM32的任意一个GPIO引脚上。在本案例中,我们选择GPIOA的第1号引脚(记为PA1)作为数据线。
### 5.2.2 数据处理与显示
在编程实现中,需要读取DHT11传感器的数据并将其显示出来。通常,我们会将数据显示在LCD屏幕上。假设我们已经有一个LCD显示函数`LCD_DisplayString`用于显示字符串,接下来是如何读取数据并显示的代码:
```c
#include "dht11.h"
#include "lcd.h"
int main(void)
{
uint8_t temperature, humidity;
dht11_init(GPIOA, GPIO_PIN_1); // 初始化DHT11,连接到GPIOA的PIN1
while (1)
{
if(dht11_read(&temperature, &humidity) == 0)
{
LCD_Clear();
LCD_DisplayString("Temp: ");
LCD_DisplayNumber(temperature);
LCD_DisplayString("C");
LCD_DisplayString("Humidity: ");
LCD_DisplayNumber(humidity);
LCD_DisplayString("%");
}
HAL_Delay(1000); // 延时1000毫秒后再次读取
}
}
```
在该代码中,`dht11_init`函数用于初始化DHT11传感器,`dht11_read`函数读取温度和湿度数据,`LCD_DisplayString`和`LCD_DisplayNumber`函数用于在LCD显示屏上显示信息。这里简化了对传感器数据的处理和显示细节。
## 5.3 项目案例三:简易无线通信系统
### 5.3.1 无线模块的集成
为了构建一个简易的无线通信系统,我们选择nRF24L01+无线模块来实现。该模块是一款工作在2.4GHz ISM频段的无线收发器,适用于点对点以及多点无线通信。我们将该模块的SPI接口与STM32的SPI引脚连接,并且还需要连接一些控制引脚到STM32的GPIO上。
### 5.3.2 通信协议设计与实现
设计一个简单的通信协议,使得两个STM32板子可以通过nRF24L01+模块发送和接收字符串消息。以下是实现发送和接收消息的代码片段:
```c
#include "nrf24l01.h"
// 发送消息函数
void send_message(const char *message)
{
char buffer[32];
sprintf(buffer, "Sending: %s", message);
nrf24l01_write(buffer, strlen(buffer)); // 发送消息
}
// 接收消息函数
void receive_message()
{
char buffer[32];
if(nrf24l01_read(buffer, sizeof(buffer))) // 接收消息
{
LCD_Clear();
LCD_DisplayString(buffer);
}
}
int main(void)
{
nrf24l01_init(SPI1, GPIOA, GPIO_PIN_4, GPIO_PIN_5, GPIO_PIN_6, GPIO_PIN_7);
while (1)
{
send_message("Hello World"); // 发送消息
HAL_Delay(1000); // 延时1000毫秒
receive_message(); // 接收消息
HAL_Delay(1000); // 延时1000毫秒
}
}
```
这段代码简化了nRF24L01模块的初始化和使用。`send_message`函数用于发送字符串消息,`receive_message`函数用于接收并显示消息。通过循环调用这些函数,STM32板子可以交替地发送和接收消息。
以上三个项目案例演示了如何使用STM32 HAL库来实现具体的项目开发。每个案例都涉及到了硬件的连接、软件编程以及调试优化的基本流程,对于初学者来说,这些案例是学习HAL库应用的好开始。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【电源设计】:如何确保VITA 42.0 XMC模块电力供应的稳定性

参考资源链接:[ANSI/VITA 42.0-2008(R2014) XMC标准规范详解](https://wenku.csdn.net/doc/640
INA226与无线传感网络集成:物联网(IoT)时代的智能连接

参考资源链接:[INA226:I2C接口电流电压功率监控器详解](https://wenku.csdn.net/doc/644b80f9ea0840391e559828?spm=1055.2635.3001.10343)
# 1. INA226与无线传感网络
图算法基础与J750实现:J750编程中的复杂网络分析
.png)
参考资源链接:[泰瑞达J750设备编程基础教程](https://wenku.csdn.net/doc/6412b472be7fbd1778d3f9e1?spm=1055.2635.3001.10343)
# 1. 图算法的基本概念和重要性
图算法是数据结构和算法领域中的一个核心部分,它关注如何在图这种数据结构上进行有效率的操作。图由顶点(或称为节点)和边组成,可以表示许多现
JEDEC JESD47L:2022温度循环指南:电子设备的温度挑战与对策

参考资源链接:[2022年JEDEC JESD47L:集成电路应力测试驱动的验收标准详解](https://wenku.csdn.net/doc/1meq3b9wrb?spm=1055.2635.3001.10343)
# 1. JEDEC JESD47L:2022概述
JEDEC JESD47L
【存储解决方案】:AFBC在SSD_HDD中的性能对比与应用案例

参考资源链接:[AFBC:ARM帧缓冲压缩技术详解](https://wenku.csdn.net/doc/5h2zjv85x7?spm=1055.2635.3001.10343)
# 1. 存储技术的基础概念
## 1.1 数据存储的基本原理
存储技术是信息技术的核心组成部分之一,其主要功能是持久保存数据,为计算设备提供数据读写服务。数据存储的基础原理涉及到数据的编码、存
【ANSYS Workbench基础入门】:新手必学的后处理技巧快速指南
参考资源链接:[ANSYS Workbench后处理完全指南:查看与分析结果](https://wenku.csdn.net/doc/4uh7h216hv?spm=1055.2635.3001.10343)
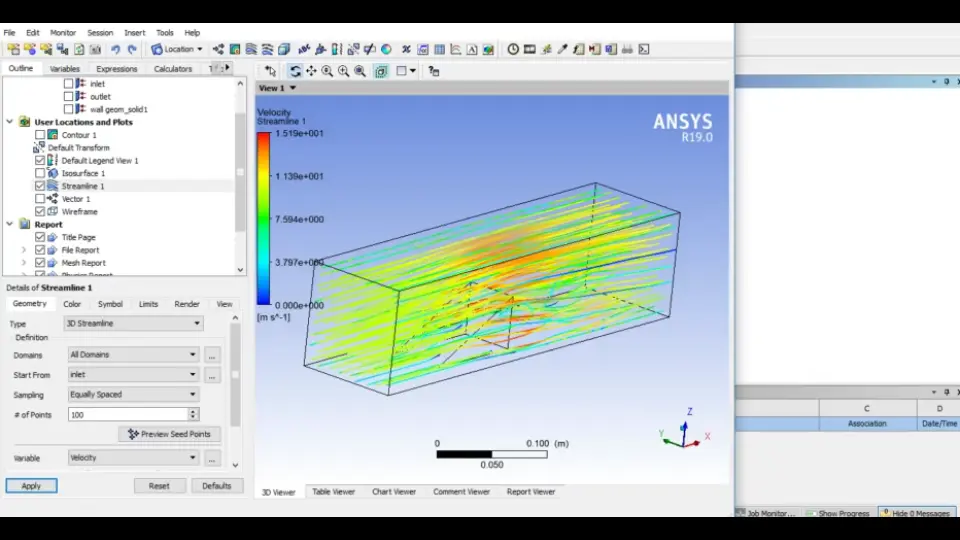
# 1. ANSYS Workbench平台概述
## 1.1 什么是ANSYS Workbench
ANSYS
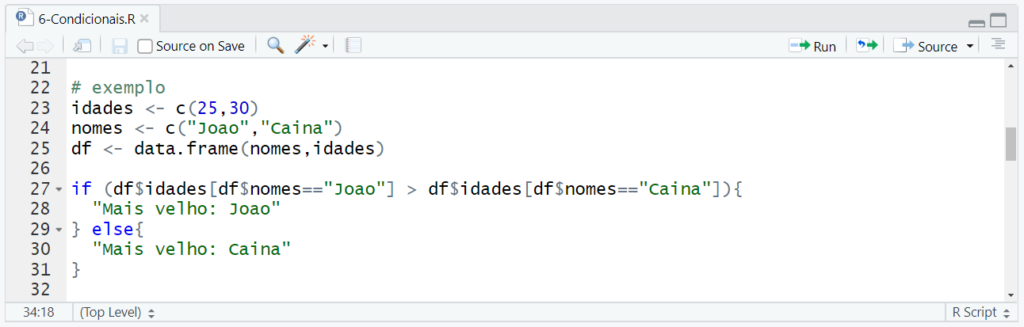
【MATLAB自动化脚本】:自动化重复任务的5大实战技巧
参考资源链接:[Simulink学习笔记:断路器控制与信号流连接解析](https://wenku.csdn.net/doc/6s79esxwjx?spm=1055.2635.3001.10343)
# 1. MATLAB自动化脚本概述
## 1.1 自动化脚本的定义与重要性
MATLAB自动化脚本是一种通过编程来控制软件操作流程的脚本语言,它使用户能够快速准确地执行重复性任务,节
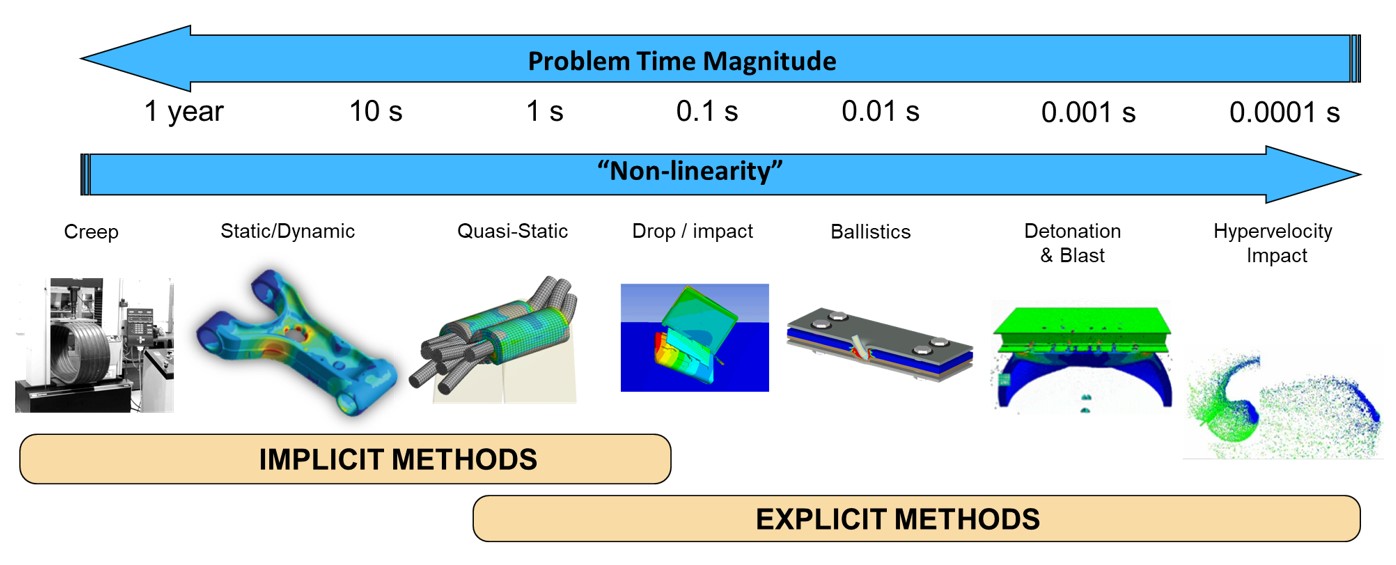
【设计迭代新策略】:LS-PrePost优化设计方法的全面解析
参考资源链接:[LS-PrePost:高级前处理与后处理全面教程](https://wenku.csdn.net/doc/22ae10d9h1?spm=1055.2635.3001.10343)
# 1. LS-PrePost优化设计方法概述
本章我们将简要介绍LS-PrePost优化设计方法
MapMatrix3D性能优化:大数据量下保持性能的秘密武器
参考资源链接:[航天远景MapMatrix3D测图操作记录.doc](https://wenku.csdn.net/doc/6412b786be7fbd1778d4a9b1?spm=1055.2635.3001.10343)
# 1. MapMatrix3D简介与性能挑战
MapMatrix3D是一款广泛应用
ESO在故障检测与诊断中的作用:策略与方法

参考资源链接:[自抗扰控制技术解析:扩张状态观测器(ESO)与参数整定](https://wenku.csdn.net/doc/1uuy08s1i3?spm=1055.2635.3001.10343)
# 1. ESO在故障检测与诊断中的重要性
在现代IT系统和工业自动化中,故障检测与诊断是确保系统稳定运行和延长设备寿命的关键环节。ESO(Extended State O
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )