STM32HAL库编程模型:深入理解回调函数机制
发布时间: 2024-12-03 02:19:32 阅读量: 5 订阅数: 7 
参考资源链接:[STM32CubeMX与STM32HAL库开发者指南](https://wenku.csdn.net/doc/6401ab9dcce7214c316e8df8?spm=1055.2635.3001.10343)
# 1. STM32HAL库编程模型概览
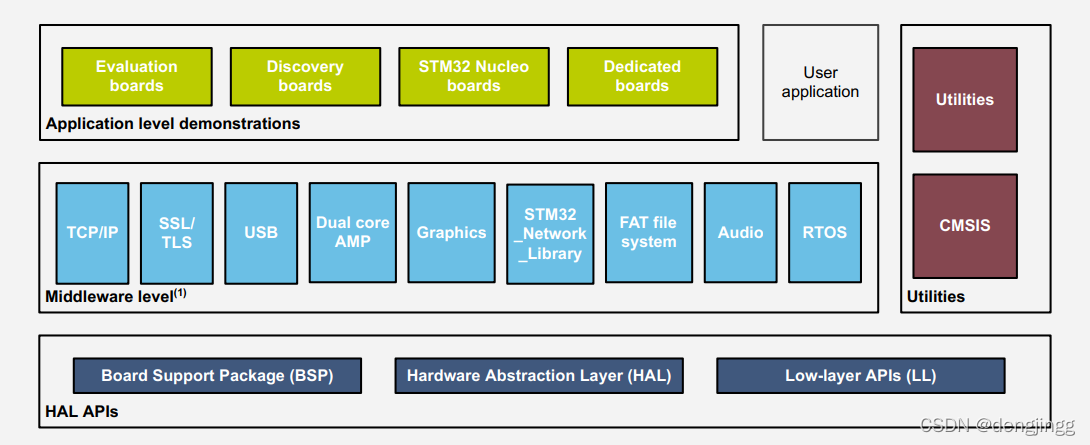
STM32微控制器因其强大的处理能力和灵活的配置选项,广泛应用于工业控制、消费电子、通信设备等领域。在这些领域中,STM32的HAL(Hardware Abstraction Layer)库成为连接软件与硬件的桥梁,提供了一个简化的编程模型。HAL库编程模型以一系列预定义的函数和数据结构为基础,使得开发者能够不必深入了解底层硬件细节,就能完成设备驱动开发和系统集成。
STM32HAL库的设计哲学在于硬件无关性和可扩展性,它为不同的STM32设备系列提供了统一的编程接口。开发者可以通过HAL库中的标准函数实现对STM32各种外设的访问和控制,包括定时器、ADC、DAC、串口通信等。此外,HAL库还内置了一些优化机制,比如中断管理、DMA(Direct Memory Access)支持等,这些都极大地提升了系统的性能和稳定性。
本章首先对STM32HAL库编程模型做一个整体性介绍,之后将深入探讨回调函数在HAL库中的作用和重要性,以及如何高效实现和优化回调函数,最后通过案例分析展示回调函数在实际项目中的应用。
# 2. 回调函数在HAL库中的角色
### 2.1 回调函数的概念和基本结构
#### 2.1.1 回调函数定义与工作原理
回调函数是一种在程序执行过程中被其他函数调用的函数,其具体的调用时机和方式通常是由调用它的函数决定的。在STM32 HAL库中,回调函数的概念尤为重要,它为应用程序提供了一种机制,以响应不同的硬件事件或软件信号。
在HAL库中,回调函数通常定义在特定的硬件初始化函数内部。例如,在初始化ADC、定时器或通信接口时,开发者可以指定一个回调函数,当相应的硬件事件发生时,这个函数就会被HAL库中的中断服务例程(ISR)调用。
工作原理上,回调函数是在中断服务例程中被调用的。当中断发生时,处理器会暂停当前执行的任务,跳转到相应的ISR中执行。在ISR中,可以调用一个或多个回调函数以处理中断事件,完成数据处理、状态更新等任务后,再返回到被中断的任务中继续执行。
#### 2.1.2 回调函数与中断服务例程的区别
回调函数和中断服务例程虽然都与中断处理有关,但它们在实现和目的上有所区别。中断服务例程是硬件中断发生时由处理器自动调用的固有函数,而回调函数是应用层面定义的,用于处理特定业务逻辑的函数。
回调函数在执行时必须非常高效,因为它在中断上下文中执行,如果执行时间过长,会影响整个系统的响应能力。而ISR则更加关注中断的处理速度,为了减少中断延迟,ISR通常会尽量少执行逻辑,并且在其中调用回调函数来完成更复杂的操作。
### 2.2 回调函数与HAL库的交互机制
#### 2.2.1 HAL库中的回调函数注册
在STM32的HAL库中,注册回调函数通常涉及配置硬件设备并将其与回调函数关联。例如,在配置ADC时,可以注册一个回调函数,用于在ADC转换完成时被调用。
```c
/* ADC init structure */
ADC_HandleTypeDef AdcHandle;
/* ADC initialization */
if (HAL_ADC_Init(&AdcHandle) != HAL_OK)
{
/* Initialization Error */
Error_Handler();
}
/* Set Callbacks */
AdcHandle.Instance = ADC1;
AdcHandle.Init.ScanConvMode = ENABLE;
AdcHandle.Init.ContinuousConvMode = ENABLE;
AdcHandle.Init.DiscontinuousConvMode = DISABLE;
AdcHandle.Init.ExternalTrigConvEdge = ADC_EXTERNALTRIGCONVEDGE_NONE;
AdcHandle.Init.ConvSamplingDelay = 0;
AdcHandle.Init.NbrOfConversion = 1;
AdcHandle.Init.NbrOfDiscConversion = 0;
AdcHandle.Init.DMAContinuousRequests = ENABLE;
AdcHandle.Init.EOCSelection = ADC_EOC_SINGLE_CONV;
/* Register the callbacks */
AdcHandle.XxxCallback = AdcConvCpltCallback; // 注册完成回调函数
AdcHandle.XxxCallback2 = NULL; // 可选的第二个回调函数
/* Start the conversion process */
if (HAL_ADC_Start(&AdcHandle) != HAL_OK)
{
/* Start Conversation Error */
Error_Handler();
}
```
在这段代码中,`AdcHandle.XxxCallback` 被赋值为 `AdcConvCpltCallback` 函数,这个函数将在ADC转换完成时被调用。
#### 2.2.2 回调函数中的参数和返回值
回调函数通常可以接收参数,这些参数由HAL库在调用时提供。例如,当中断发生时,ISR会传递一个指向中断数据结构的指针,回调函数可以利用这些数据进行处理。
回调函数的返回类型通常是 `void`,因为它们主要是为了处理事件而不是返回数据。然而,回调函数可以设置全局变量或调用其他函数以产生间接的输出。
### 2.3 回调函数在设备驱动中的应用
#### 2.3.1 设备初始化阶段的回调使用
在设备初始化阶段,回调函数可以用于处理初始化过程中的特定事件。例如,在初始化一个串行通信接口时,可能需要在通信链路建立后执行特定的操作。
```c
void HAL_UART_MspInit(UART_HandleTypeDef* uartHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(uartHandle->Instance==USARTx)
{
/* USARTx clock enable */
USARTx_CLK_ENABLE();
/* Configure USARTx Tx as alternate function push-pull */
GPIO_InitStruct.Pin = USARTx_TX_PIN;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(USARTx_GPIO_PORT, &GPIO_InitStruct);
/* USARTx interrupt Init */
HAL_NVIC_SetPriority(USARTx_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(USARTx_IRQn);
/* Set Callbacks */
uartHandle->XxxCallback = USARTx_TxHalfCpltCallback;
uartHandle->XxxCallback2 = USARTx_RxHalfCpltCallback;
}
}
```
在这个例子中,`USARTx_TxHalfCpltCallback` 和 `USARTx_RxHalfCpltCallback` 被用作发送和接收半完成时的回调函数。
#### 2.3.2 设备运行状态监控的回调实现
回调函数可以用来监控设备的运行状态,例如,当设备进入特定模式或者遇到错误时,可以调用回调函数进行处理。
```c
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if (htim->Instance == TIMx)
{
/* Time base interrupt processing */
// 在这里可以处理定时器溢出事件
}
}
```
在上述代码中,`HAL_TIM_PeriodElapsedCallback` 是一个定时器中断触发时被调用的回调函数,开发者可以在这里编写定时器溢出时需要执行的代码。
以上展示了回调函数在STM32 HAL库中的基础作用及其与硬件设备交互的方式。回调函数是提高代码模块性和事件驱动编程效率的关键技术之一。在接下来的章节中,我们将深入探讨回调函数的实现技巧、性能优化、调试方法以及如何提升其可维护性。
# 3. 回调函数的实现与优化
## 3.1 编写高性能回调函数的技巧
回调函数是程序设计中一种重要的模式,尤其是在实时操作系统(RTOS)和硬件抽象层(HAL)编程中。回调函数能够有效地将处理逻辑委托给其他函数执行,从而达到模块化和解耦的效果。在STM32HAL库编程中,编写高性能回调函数显得尤为重要,这直接关系到整个系统的响应性和效率。
### 3.1.1 避免回调函数中的阻塞操作
为了避免回调函数阻塞整个系统的运行,我们应该注意以下几点:
- **非阻塞API的使用**:在回调函数中尽量使用非阻塞API调用。例如,在与I/O设备交互时,应使用轮询(polling)而非阻塞(blocking)方式。
- **异步处理**:尽可能将耗时操作放在中断服务例程(ISR)中,或者在回调函数中启动异步处理流程。
- **任务优先级的合理分配**:根据任务的紧急程度和重要性设置合理的优先级,确保高优先级的任务(如与用户界面交互)不会被低优先级的任务(如回调函数中的数据处理)阻塞。
示例代码块展示如何使用STM32 HAL库非阻塞地读取数据:
```c
// 假设ADC数据读取的回调函数
void HAL_ADC_ConvCpltCallback(ADC_HandleTypeDef* hadc) {
// 这里避免执行阻塞操作
// 可以将数据处理委托给其他函数或者任务
ProcessADCData(hadc->pPayload);
}
// 处理ADC数据,确保这个函数不会执行长时间操作
void ProcessADC
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
西门子V90伺服选型指南:关键因素与决策过程的专家解读

参考资源链接:[SINAMICS V90 PN 伺服系统与SIMOTICS S-1FL6 伺服电机安装调试指南](https://wenku.csdn.net/doc/6401ad3dcce7214c316eecf9?spm=1055.2635.3001.10343)
# 1. 西门子V90伺服驱动概述
伺服驱动是自动化设备中不可或缺的部分,西门子作为工业自
【图标与版本信息自定义】:VS中.exe文件外观与细节调整术
参考资源链接:[VS修改可执行文件(.exe)的详细信息](https://wenku.csdn.net/doc/6412b70cbe7fbd1778d48e82?spm=1055.2635.3001.10343)
# 1. 图标与版本信息自定义
JY901兼容性全解:确保无缝对接的终极解决方案(兼容性大师)

参考资源链接:[JY901高精度9轴姿态传感器技术手册](https://wenku.csdn.net/doc/5y0wyttn3a?spm=1055.2635.3001.10343)
# 1. JY901兼容性全解概述
JY901作为一款在市场上具有广泛影响力的设备
【存储解决方案】:AFBC在SSD_HDD中的性能对比与应用案例

参考资源链接:[AFBC:ARM帧缓冲压缩技术详解](https://wenku.csdn.net/doc/5h2zjv85x7?spm=1055.2635.3001.10343)
# 1. 存储技术的基础概念
## 1.1 数据存储的基本原理
存储技术是信息技术的核心组成部分之一,其主要功能是持久保存数据,为计算设备提供数据读写服务。数据存储的基础原理涉及到数据的编码、存
【Simulink多域仿真】:跨领域问题的5大解决策略
参考资源链接:[Simulink学习笔记:断路器控制与信号流连接解析](https://wenku.csdn.net/doc/6s79
功率循环测试大揭秘:JEDEC JESD47L:2022电子元件耐力挑战
参考资源链接:[2022年JEDEC JESD47L:集成电路应力测试驱动的验收标准详解](https://wenku.csdn.net/doc/1meq3b9wrb?spm=1055.2635.3001.10343)
# 1. 功率循环测试概述
## 1.1 测试的重要性
功率循环测试是电子工程领域中的一项关键程序,它确保了电子组件在频繁的功率变化下能
【热设计与散热】:VITA 42.0 XMC模块散热技术的前沿研究

参考资源链接:[ANSI/VITA 42.0-2008(R2014) XMC标准规范详解](https://wenku.csdn.net/doc/6401ad34cce7214c316eeac0?spm=1055.2635.3001.10343)
# 1. 热设计与散热基础概念
在电子设备中,
INA226与无线传感网络集成:物联网(IoT)时代的智能连接

参考资源链接:[INA226:I2C接口电流电压功率监控器详解](https://wenku.csdn.net/doc/644b80f9ea0840391e559828?spm=1055.2635.3001.10343)
# 1. INA226与无线传感网络
图算法基础与J750实现:J750编程中的复杂网络分析
.png)
参考资源链接:[泰瑞达J750设备编程基础教程](https://wenku.csdn.net/doc/6412b472be7fbd1778d3f9e1?spm=1055.2635.3001.10343)
# 1. 图算法的基本概念和重要性
图算法是数据结构和算法领域中的一个核心部分,它关注如何在图这种数据结构上进行有效率的操作。图由顶点(或称为节点)和边组成,可以表示许多现
深度分析【ANSYS Workbench后处理】:复杂结果解读的专业方法
参考资源链接:[ANSYS Workbench后处理完全指南:查看与分析结果](https://wenku.csdn.net/doc/4uh7h216hv?spm=1055.2635.3001.10343)
# 1. ANSYS Workbench后处理基础
## 1.1 ANSYS Workbench简介
ANSYS
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )