STM32单片机常见问题全解析:从入门到精通,解决疑难杂症
发布时间: 2024-07-03 03:55:55 阅读量: 69 订阅数: 45 

windows安装卸载疑难杂症解决包

# 1. STM32单片机简介和基础知识**
STM32单片机是意法半导体公司生产的一系列基于ARM Cortex-M内核的高性能微控制器。它具有广泛的型号和封装,适用于各种嵌入式应用。
STM32单片机具有以下特点:
* 高性能:基于ARM Cortex-M内核,提供高处理速度和低功耗。
* 丰富的外设:集成多种外设,如GPIO、定时器、串口、ADC等,满足各种应用需求。
* 易于使用:提供完善的开发工具链和文档,降低开发难度。
# 2. STM32单片机编程环境搭建和基本语法
### 2.1 编程环境搭建
#### 硬件环境
STM32单片机编程需要准备以下硬件:
- STM32开发板
- USB数据线
- 调试器(可选)
#### 软件环境
- Keil MDK集成开发环境
- ST-Link调试器驱动程序
- 相关库文件
**Keil MDK集成开发环境安装**
1. 下载Keil MDK安装包。
2. 双击安装包,按照提示进行安装。
3. 安装完成后,打开Keil MDK。
**ST-Link调试器驱动程序安装**
1. 下载ST-Link调试器驱动程序。
2. 双击安装包,按照提示进行安装。
3. 安装完成后,连接STM32开发板和电脑。
**相关库文件下载**
STM32单片机编程需要使用相关的库文件,可以从ST官网下载。
### 2.2 基本语法介绍
STM32单片机使用C语言进行编程,基本语法与标准C语言类似。
#### 关键字
STM32单片机编程中常用的关键字包括:
```
int、float、char、void、return、if、else、while、for
```
#### 数据类型
STM32单片机支持多种数据类型,包括:
| 数据类型 | 占用字节数 | 取值范围 |
|---|---|---|
| int | 4 | -2147483648 ~ 2147483647 |
| float | 4 | IEEE 754单精度浮点数 |
| char | 1 | ASCII字符集 |
#### 变量
变量用于存储数据,在STM32单片机编程中,变量的声明格式为:
```
数据类型 变量名;
```
例如:
```
int a;
float b;
char c;
```
### 2.3 数据类型和变量
#### 数据类型
STM32单片机支持多种数据类型,包括:
| 数据类型 | 占用字节数 | 取值范围 |
|---|---|---|
| int | 4 | -2147483648 ~ 2147483647 |
| float | 4 | IEEE 754单精度浮点数 |
| char | 1 | ASCII字符集 |
| bool | 1 | true/false |
| enum | 1-4 | 枚举值 |
| struct | 可变 | 结构体 |
| union | 可变 | 联合体 |
#### 变量
变量用于存储数据,在STM32单片机编程中,变量的声明格式为:
```
数据类型 变量名;
```
例如:
```
int a;
float b;
char c;
bool d;
enum color {RED, GREEN, BLUE};
```
#### 变量作用域
变量的作用域是指变量在程序中可以被访问的范围。STM32单片机编程中,变量的作用域有局部变量和全局变量两种。
- 局部变量:在函数或块中声明的变量,只能在该函数或块中访问。
- 全局变量:在函数或块外声明的变量,可以在整个程序中访问。
#### 变量初始化
变量可以在声明时初始化,也可以在程序中赋值。变量初始化的格式为:
```
数据类型 变量名 = 初始值;
```
例如:
```
int a = 10;
float b = 3.14;
char c = 'A';
```
# 3. STM32单片机外设接口和应用
### 3.1 GPIO接口
**简介**
GPIO(General Purpose Input/Output)接口是STM32单片机中用于与外部设备进行数据交互的最基本的外设接口。它可以配置为输入、输出或模拟功能,并支持各种电气特性,如推挽输出、开漏输出和上拉/下拉电阻。
**结构**
每个GPIO端口包含多个引脚,每个引脚都可以独立配置。引脚的配置寄存器包括:
- 数据方向寄存器(GPIOx_MODER):配置引脚为输入或输出
- 输出数据寄存器(GPIOx_ODR):控制引脚输出电平
- 输入数据寄存器(GPIOx_IDR):读取引脚输入电平
- 配置寄存器(GPIOx_PUPDR):配置上拉/下拉电阻
**应用**
GPIO接口广泛应用于各种电子设备中,用于连接按钮、开关、LED灯、传感器和执行器等外部设备。以下是一些典型的应用:
- 控制LED灯亮灭
- 读取按钮状态
- 检测传感器数据
- 驱动执行器
**代码示例**
```c
// 配置GPIOA引脚0为输出模式
GPIOA->MODER &= ~GPIO_MODER_MODE0;
GPIOA->MODER |= GPIO_MODER_MODE0_0;
// 设置GPIOA引脚0输出高电平
GPIOA->ODR |= GPIO_ODR_OD0;
// 读取GPIOA引脚0输入电平
uint8_t input_level = GPIOA->IDR & GPIO_IDR_ID0;
```
### 3.2 定时器接口
**简介**
定时器接口是STM32单片机中用于生成精确时间间隔和脉冲的通用外设。它支持多种定时器模式,如计数器、脉冲宽度调制(PWM)和捕获/比较。
**结构**
STM32单片机有多个定时器,每个定时器都有自己的控制寄存器和计数器寄存器。控制寄存器用于配置定时器的模式、时钟源和中断。计数器寄存器用于存储当前计数值。
**应用**
定时器接口广泛应用于各种电子设备中,用于生成周期性信号、测量时间间隔和控制PWM输出。以下是一些典型的应用:
- 产生LED闪烁效果
- 测量传感器数据采样时间
- 控制电机转速
**代码示例**
```c
// 配置TIM2为计数器模式
TIM2->CR1 &= ~TIM_CR1_MODE;
TIM2->CR1 |= TIM_CR1_MODE_COUNTUP;
// 设置TIM2计数器时钟源为APB1时钟
TIM2->PSC = 80 - 1; // 分频系数为80
// 设置TIM2计数器自动重装载值
TIM2->ARR = 1000 - 1; // 自动重装载值
// 启用TIM2计数器
TIM2->CR1 |= TIM_CR1_CEN;
```
### 3.3 串口接口
**简介**
串口接口是STM32单片机中用于与其他设备进行串行数据通信的外设。它支持异步和同步通信,并支持各种波特率和数据格式。
**结构**
串口接口包括一个发送器和一个接收器。发送器将数据从单片机发送到外部设备,而接收器将数据从外部设备接收至单片机。每个串口接口都有自己的控制寄存器、数据寄存器和状态寄存器。
**应用**
串口接口广泛应用于各种电子设备中,用于与计算机、打印机、传感器和执行器等外部设备进行通信。以下是一些典型的应用:
- 与计算机进行数据交换
- 控制打印机打印
- 读取传感器数据
- 控制执行器动作
**代码示例**
```c
// 配置USART1为异步通信模式
USART1->CR1 &= ~USART_CR1_M;
// 设置USART1波特率为9600
USART1->BRR = 8000000 / 9600;
// 启用USART1发送器和接收器
USART1->CR1 |= USART_CR1_TE | USART_CR1_RE;
// 发送一个字节数据
USART1->DR = 'A';
// 接收一个字节数据
uint8_t received_data = USART1->DR;
```
### 3.4 ADC接口
**简介**
ADC(Analog-to-Digital Converter)接口是STM32单片机中用于将模拟信号转换为数字信号的外设。它支持多种采样率和分辨率,并可以配置为单次转换或连续转换模式。
**结构**
ADC接口包括一个多路复用器、一个模数转换器和一个控制寄存器。多路复用器用于选择要转换的模拟信号,模数转换器将模拟信号转换为数字信号,控制寄存器用于配置ADC接口的模式和参数。
**应用**
ADC接口广泛应用于各种电子设备中,用于测量电压、电流、温度和压力等模拟信号。以下是一些典型的应用:
- 测量电池电压
- 检测温度传感器数据
- 采集音频信号
**代码示例**
```c
// 配置ADC1为单次转换模式
ADC1->CR1 &= ~ADC_CR1_CONT;
// 设置ADC1采样率为100Hz
ADC1->SMPR1 |= ADC_SMPR1_SMP1_0 | ADC_SMPR1_SMP1_1 | ADC_SMPR1_SMP1_2;
// 设置ADC1分辨率为12位
ADC1->CR1 |= ADC_CR1_RES_1;
// 触发ADC1单次转换
ADC1->CR2 |= ADC_CR2_SWSTART;
// 读取ADC1转换结果
uint16_t adc_result = ADC1->DR;
```
# 4.1 中断和 DMA
### 4.1.1 中断简介
中断是一种硬件机制,当发生特定事件时,会暂停当前正在执行的程序,并转而执行中断服务程序 (ISR)。中断事件可以由外部设备或内部事件触发,例如:
* 外部中断:由外部设备(如按钮、传感器)产生的信号触发。
* 内部中断:由单片机内部事件(如定时器溢出、数据传输完成)触发。
### 4.1.2 中断向量表
每个中断事件都有一个对应的中断向量地址,存储在中断向量表中。当发生中断时,单片机将跳转到中断向量表中相应的中断向量地址,开始执行 ISR。
### 4.1.3 中断优先级
STM32 单片机支持多级中断优先级,允许用户根据中断事件的重要性设置优先级。当多个中断同时发生时,优先级较高的中断将被优先处理。
### 4.1.4 中断配置
要启用和配置中断,需要执行以下步骤:
1. 确定要使用的中断事件。
2. 在中断向量表中找到相应的中断向量地址。
3. 编写 ISR,并将其放置在中断向量地址处。
4. 配置中断优先级和中断使能位。
### 4.1.5 DMA 简介
DMA(直接内存访问)是一种硬件机制,允许外设直接与内存进行数据传输,无需 CPU 参与。这可以大大提高数据传输速度,减轻 CPU 负担。
### 4.1.6 DMA 配置
要配置 DMA,需要执行以下步骤:
1. 确定要使用的 DMA 通道。
2. 配置 DMA 源地址和目标地址。
3. 设置 DMA 传输大小和传输方向。
4. 启用 DMA 通道。
### 代码示例
**中断配置代码示例:**
```c
// 启用外部中断 0
NVIC_EnableIRQ(EXTI0_IRQn);
// 配置中断优先级
NVIC_SetPriority(EXTI0_IRQn, 2);
// 中断服务程序
void EXTI0_IRQHandler(void) {
// 中断处理代码
}
```
**DMA 配置代码示例:**
```c
// 启用 DMA 通道 1
DMA_Channel_Enable(DMA1_Channel1);
// 配置 DMA 源地址和目标地址
DMA_SetSourceAddress(DMA1_Channel1, (uint32_t)source_buffer);
DMA_SetDestinationAddress(DMA1_Channel1, (uint32_t)destination_buffer);
// 设置 DMA 传输大小和传输方向
DMA_SetBufferSize(DMA1_Channel1, transfer_size);
DMA_SetTransferDirection(DMA1_Channel1, DMA_MEMORY_TO_MEMORY);
// 启动 DMA 传输
DMA_StartTransfer(DMA1_Channel1);
```
### 流程图
**中断处理流程图:**
```mermaid
graph LR
subgraph 中断发生
A[中断事件发生] --> B[跳转到中断向量表]
B --> C[执行 ISR]
end
subgraph 中断结束
D[ISR 执行完毕] --> E[返回到原程序]
end
```
**DMA 数据传输流程图:**
```mermaid
graph LR
subgraph DMA 配置
A[配置 DMA 通道] --> B[设置 DMA 源地址和目标地址]
B --> C[设置 DMA 传输大小和传输方向]
end
subgraph DMA 数据传输
D[启动 DMA 传输] --> E[DMA 数据传输]
end
```
### 表格
**中断优先级表:**
| 中断 | 优先级 |
|---|---|
| NMI | 0 |
| HardFault | 1 |
| MemManage | 2 |
| BusFault | 3 |
| UsageFault | 4 |
| SVC | 5 |
| DebugMon | 6 |
| PendSV | 7 |
| SysTick | 8 |
| ... | ... |
**DMA 通道表:**
| DMA 通道 | 外设 |
|---|---|
| DMA1_Channel1 | USART1 |
| DMA1_Channel2 | USART2 |
| DMA1_Channel3 | USART3 |
| ... | ... |
# 5.1 硬件问题排查
### 5.1.1 供电问题
**症状:**
- 单片机无法上电或上电后复位
- 单片机工作不稳定,出现死机或重启
**排查步骤:**
1. 检查电源模块是否正常工作,输出电压是否符合要求。
2. 检查单片机供电引脚是否连接正确,是否有虚焊或短路。
3. 检查滤波电容是否正常,容量是否合适。
4. 检查是否存在电磁干扰,如来自其他设备或电线。
### 5.1.2 外设故障
**症状:**
- 外设无法正常工作,如 GPIO 引脚无法输出或输入信号
- 外设与单片机通信异常,如 I2C 总线无法通信
**排查步骤:**
1. 检查外设是否损坏,如是否存在短路或断路。
2. 检查外设与单片机的连接是否正确,是否有虚焊或短路。
3. 检查外设的配置寄存器是否设置正确。
4. 检查是否存在电磁干扰,如来自其他设备或电线。
### 5.1.3 时钟问题
**症状:**
- 单片机运行速度异常,如程序执行时间过长或过短
- 外设工作不稳定,如定时器无法产生准确的时钟信号
**排查步骤:**
1. 检查时钟源是否正常工作,如晶振或外部时钟源。
2. 检查时钟分频器是否设置正确。
3. 检查时钟输出引脚是否连接正确,是否有虚焊或短路。
4. 检查是否存在电磁干扰,如来自其他设备或电线。
### 5.1.4 复位问题
**症状:**
- 单片机无法复位,或者复位后无法正常启动
- 单片机频繁复位,出现死循环
**排查步骤:**
1. 检查复位引脚是否连接正确,是否有虚焊或短路。
2. 检查复位电路是否正常工作,如复位按钮或看门狗定时器。
3. 检查是否存在电磁干扰,如来自其他设备或电线。
# 6. STM32单片机项目实战和案例分析
### 6.1 智能家居控制系统
**简介**
智能家居控制系统是一种利用STM32单片机实现对家庭环境中各种电器设备进行远程控制和管理的系统。它可以提高家庭的舒适度、便利性和安全性。
**系统架构**
智能家居控制系统通常由以下组件组成:
- **传感器:**用于检测环境参数,如温度、湿度、光照等。
- **执行器:**用于控制电器设备,如灯具、空调、窗帘等。
- **中央控制器:**基于STM32单片机的中央控制器,负责接收传感器数据、控制执行器、处理用户指令等。
- **通信网络:**用于连接传感器、执行器和中央控制器,可以采用Wi-Fi、ZigBee等无线通信技术。
**实现**
STM32单片机在智能家居控制系统中主要负责以下功能:
- **数据采集:**通过ADC、I2C等接口采集传感器数据。
- **数据处理:**对采集到的数据进行处理和分析,判断是否需要触发控制动作。
- **控制输出:**通过GPIO、PWM等接口控制执行器,实现对电器设备的控制。
- **通信处理:**通过Wi-Fi、ZigBee等通信接口与其他设备进行通信,接收用户指令和发送控制信息。
### 6.2 物联网数据采集系统
**简介**
物联网数据采集系统是一种利用STM32单片机采集物联网设备传感器数据并将其传输到云平台的系统。它可以实现对物联网设备的远程监控和管理。
**系统架构**
物联网数据采集系统通常由以下组件组成:
- **传感器:**用于采集物联网设备的传感器数据。
- **STM32单片机:**负责采集传感器数据、处理数据、与云平台通信等。
- **通信模块:**用于与云平台进行通信,可以采用Wi-Fi、GPRS等通信技术。
- **云平台:**用于存储和处理采集到的数据,提供数据分析和可视化功能。
**实现**
STM32单片机在物联网数据采集系统中主要负责以下功能:
- **数据采集:**通过ADC、I2C等接口采集传感器数据。
- **数据处理:**对采集到的数据进行处理和分析,格式化数据并压缩传输。
- **通信处理:**通过Wi-Fi、GPRS等通信接口与云平台进行通信,发送采集到的数据。
- **低功耗管理:**优化单片机功耗,延长电池续航时间。
### 6.3 机器人控制系统
**简介**
机器人控制系统是一种利用STM32单片机控制机器人运动和行为的系统。它可以实现机器人的自主导航、避障、目标识别等功能。
**系统架构**
机器人控制系统通常由以下组件组成:
- **传感器:**用于采集机器人周围环境信息,如距离传感器、陀螺仪、加速度计等。
- **STM32单片机:**负责处理传感器数据、控制机器人运动、执行算法等。
- **电机驱动器:**用于控制机器人的电机,实现机器人的运动。
- **电源系统:**为机器人提供电源,保证系统的正常运行。
**实现**
STM32单片机在机器人控制系统中主要负责以下功能:
- **数据采集:**通过ADC、I2C等接口采集传感器数据。
- **数据处理:**对采集到的数据进行处理和分析,判断机器人的运动状态和周围环境。
- **控制输出:**通过PWM、GPIO等接口控制电机驱动器,实现机器人的运动。
- **算法实现:**实现导航、避障、目标识别等算法,控制机器人的行为。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
STM32单片机专栏深入探讨了STM32单片机的优缺点、常见问题、开发实战秘籍、性能优化宝典、调试指南、外设详解、中断机制剖析、存储管理解析、电源管理策略、实时操作系统选择指南、嵌入式系统设计实战、物联网应用开发、图像处理算法优化、电机控制技术、工业控制系统设计、医疗电子设备开发、汽车电子系统应用、航空航天系统设计、军工电子系统开发等各个方面。通过深入浅出的讲解和丰富的实例,该专栏旨在帮助读者全面了解STM32单片机的特性,解决疑难杂症,提升开发效率,并拓展应用领域。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【KEBA机器人高级攻略】:揭秘行业专家的进阶技巧

# 摘要
本论文对KEBA机器人进行全面的概述与分析,从基础知识到操作系统深入探讨,特别关注其启动、配置、任务管理和网络连接的细节。深入讨论了KEBA机器人的编程进阶技能,包括高级语言特性、路径规划及控制算法,以及机器人视觉与传感器的集成。通过实际案例分析,本文详细阐述了KEBA机器人在自动化生产线、高精度组装以及与人类协作方面的应用和优化。最后,探讨了KEBA机器人集成
【基于IRIG 106-19的遥测数据采集】:最佳实践揭秘
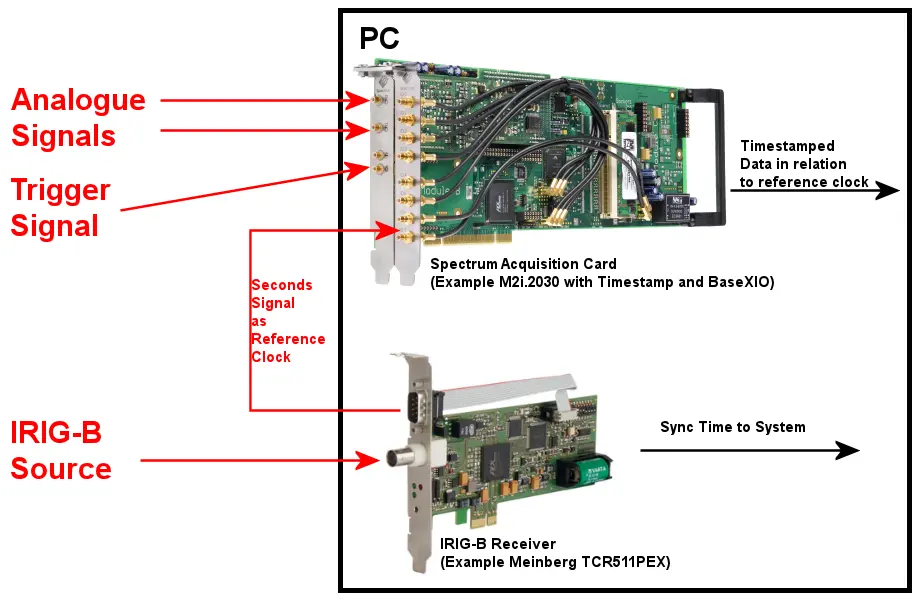
# 摘要
本文系统地介绍了IRIG 106-19标准及其在遥测数据采集领域的应用。首先概述了IRIG 106-19标准的核心内容,并探讨了遥测系统的组成与功能。其次,深入分析了该标准下数据格式与编码,以及采样频率与数据精度的关系。随后,文章详细阐述了遥测数据采集系统的设计与实现,包括硬件选型、软件框架以及系统优化策略,特别是实时性与可靠
【提升设计的艺术】:如何运用状态图和活动图优化软件界面
# 摘要
本文系统地探讨了状态图和活动图在软件界面设计中的应用及其理论基础。首先介绍了状态图与活动图的基本概念和组成元素,随后深入分析了在用户界面设计中绘制有效状态图和活动图的实践技巧。文中还探讨了设计原则,并通过案例分析展示了如何将这些图表有效地应用于界面设计。文章进一步讨论了状态图与活动图的互补性和结合使用,以及如何将理论知识转化为实践中的设计过程。最后,展望了面向未来的软
台达触摸屏宏编程故障不再难:5大常见问题及解决策略

# 摘要
台达触摸屏宏编程是一种为特定自动化应用定制界面和控制逻辑的有效技术。本文从基础概念开始介绍,详细阐述了台达触摸屏宏编程语言的特点、环境设置、基本命令及结构。通过分析常见故障类型和诊断方法,本文深入探讨了故障产生的根源,包括语法和逻辑错误、资源限制等。针对这
构建高效RM69330工作流:集成、测试与安全性的终极指南
# 摘要
本论文详细介绍了RM69330工作流的集成策略、测试方法论以及安全性强化,并展望了其高级应用和未来发展趋势。首先概述了RM69330工作流的基础理论与实践,并探讨了与现有系统的兼容性。接着,深入分析了数据集成的挑战、自动化工作流设计原则以及测试的规划与实施。文章重点阐述了工作流安全性设计原则、安全威胁的预防与应对措施,以及持续监控与审计的重要性。通过案例研究,展示了RM
Easylast3D_3.0速成课:5分钟掌握建模秘籍

# 摘要
Easylast3D_3.0是业界领先的三维建模软件,本文提供了该软件的全面概览和高级建模技巧。首先介绍了软件界面布局、基本操作和建模工具,然后深入探讨了材质应用、曲面建模以及动画制作等高级功能。通过实际案例演练,展示了Easylast3D_3.0在产品建模、角色创建和场景构建方面的应用。此外,本文还讨
【信号完整性分析速成课】:Cadence SigXplorer新手到专家必备指南
# 摘要
本论文旨在系统性地介绍信号完整性(SI)的基础知识,并提供使用Cadence SigXplorer工具进行信号完整性分析的详细指南。首先,本文对信号完整性的基本概念和理论进行了概述,为读者提供必要的背景知识。随后,重点介绍了Cadence SigXplorer界面布局、操作流程和自定义设置,以及如何优化工作环境以提高工作效率。在实践层面,论文详细解释了信号完整性分析的关键概念,包括信号衰
高速信号处理秘诀:FET1.1与QFP48 MTT接口设计深度剖析
# 摘要
高速信号处理与接口设计在现代电子系统中起着至关重要的作用,特别是在数据采集、工业自动化等领域。本文首先概述了高速信号处理与接口设计的基本概念,随后深入探讨了FET1.1接口和QFP48 MTT接口的技术细节,包括它们的原理、硬件设计要点、软件驱动实现等。接着,分析了两种接口的协同设计,包括理论基础、
【MATLAB M_map符号系统】:数据点创造性表达的5种方法

# 摘要
本文详细介绍了M_map符号系统的基本概念、安装步骤、符号和映射机制、自定义与优化方法、数据点创造性表达技巧以及实践案例分析。通过系统地阐述M_map的坐标系统、个性化符号库的创建、符号视觉效果和性能的优化,本文旨在提供一种有效的方法来增强地图数据的可视化表现力。同时,文章还探讨了M_map在科学数据可视化、商业分析及教育领域的应用,并对其进阶技巧和未来的发展趋势提出了预测和建议。
物流监控智能化:Proton-WMS设备与传感器集成解决方案
# 摘要
物流监控智能化是现代化物流管理的关键组成部分,有助于提高运营效率、减少错误以及提升供应链的透明度。本文概述了Proton-WMS系统的架构与功能,包括核心模块划分和关键组件的作用与互动,以及其在数据采集、自动化流程控制和实时监控告警系统方面的实际应用。此外,文章探讨了设备与传感器集成技术的原理、兼容性考量以及解决过程中的问题。通过分析实施案例,本文揭示了Proton-WMS集成的关键成功要素,并讨论了未来技术发展趋势和系统升级规划,
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )