NEO-6M模块高动态性能分析:高速移动场景下的定位解决方案
发布时间: 2024-12-14 14:12:29 阅读量: 1 订阅数: 3 

NEO-6M GPS模块_flightf55_NEO-6M_NEO-6M低功耗_similarqwg_GPS_
参考资源链接:[NEO-6M GPS模块使用说明](https://wenku.csdn.net/doc/6412b706be7fbd1778d48d3b?spm=1055.2635.3001.10343)
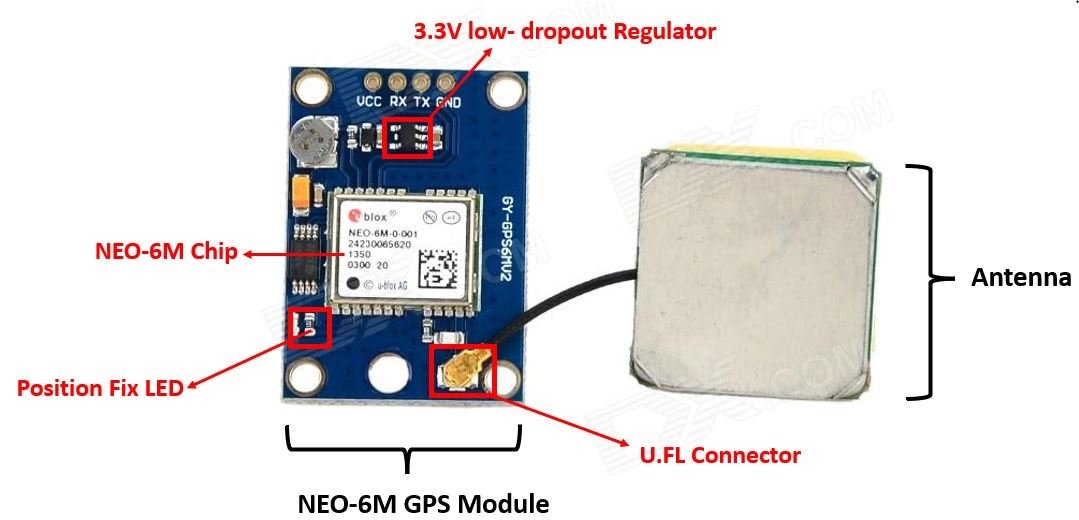
# 1. NEO-6M模块概述
在现代导航技术中,NEO-6M模块扮演着至关重要的角色。它是一款高性能的GPS接收器,能够在各种复杂的环境中提供准确的定位信息。NEO-6M模块的设计旨在为用户带来简易、快速的定位体验,同时在高动态环境中也能保证较高的定位精度和稳定性。
## 1.1 基本功能与特性
NEO-6M模块集成了多颗高性能的GPS芯片,可以同时跟踪多颗GPS卫星。它支持多种定位模式,包括单点定位和差分定位,能够应对不同的使用场景。模块还具备低功耗的特点,使其非常适合在便携式和移动设备中使用。
## 1.2 应用领域
NEO-6M模块因其高性价比被广泛应用于个人导航设备、无人驾驶汽车、无人机、手持设备等领域。该模块还支持多种接口协议,例如NMEA 0183和UBX协议,这使得它能够轻松集成到各种软硬件系统中。
## 1.3 技术优势
NEO-6M模块的一个显著技术优势是其高灵敏度。即便在信号较弱的城市峡谷或树木密集区域,模块也能快速捕获信号,保持持续稳定的导航服务。此外,它的快速初始化和首次定位时间也是用户评价较高的特点之一。
下面将深入探讨高动态环境下的定位理论,理解在该环境下NEO-6M模块如何克服诸多挑战,保证精准定位。
# 2. 高动态环境下的定位理论
## 2.1 GPS信号在高动态中的传播特性
在高动态环境下,GPS信号的传播特性会受到多种因素的影响。高动态环境,如高速移动的车辆、飞行器和舰船,会极大地挑战GPS接收器的定位性能。
### 2.1.1 多普勒效应及其对定位的影响
多普勒效应是高动态环境下最显著的物理现象之一。当接收器与卫星之间存在相对运动时,接收器会观测到频率的偏移,称为多普勒频移。
#### 多普勒频移的计算公式
多普勒频移可以通过以下公式计算:
\[ f_d = \frac{f}{c} \cdot v_r \cdot \cos(\theta) \]
其中,\( f_d \) 是多普勒频移,\( f \) 是卫星信号的发射频率,\( c \) 是光速,\( v_r \) 是接收器相对于卫星的速度分量,\( \theta \) 是速度向量与接收器天线指向的卫星之间的夹角。
在高动态情况下,速度向量 \( v_r \) 变化快速,导致多普勒频移不断变化,这要求接收器能够快速跟踪和校正这一频率偏移,以确保信号的正确解调。
### 2.1.2 信号衰减与干扰分析
除了多普勒效应之外,信号在高动态环境中的传播还可能受到其他干扰的影响,如建筑物遮挡、大气条件、多路径效应和电子干扰。
#### 信号衰减分析
信号衰减通常受到以下几个因素的影响:
- **大气延迟**:电离层和对流层的影响导致信号传播路径变长,从而引起时延和衰减。
- **多路径效应**:信号的反射和折射会造成接收器接收到多个不同路径的信号副本,导致信号的干涉和衰减。
为了减少这些干扰,高动态GPS接收器通常会采用更强大的算法来处理这些问题。例如,通过使用更先进的滤波器和信号处理技术来分离多路径效应,或者通过增强信号的功率来对抗衰减。
## 2.2 高动态环境定位算法原理
为了在高动态环境中保持稳定的定位性能,必须采用专门的定位算法来处理GPS信号。
### 2.2.1 滤波算法在高动态定位中的应用
在高动态条件下,传统的GPS定位算法可能无法满足实时性和精确性的要求。因此,滤波算法被广泛应用于增强GPS信号处理能力。
#### 卡尔曼滤波器的原理
卡尔曼滤波器是一种有效的递归滤波器,它可以估计线性动态系统的状态。其工作原理包括以下步骤:
1. **预测**:根据当前状态和系统动态模型预测下一时刻的状态。
2. **更新**:使用当前测量值来更新预测值,从而获得更准确的状态估计。
卡尔曼滤波器特别适用于高动态定位,因为它能够实时地处理快速变化的数据,并能够有效地抑制噪声和不确定性。
### 2.2.2 时间同步与频率同步机制
为了保证定位的准确性,接收器必须与卫星的时间和频率同步。在高动态环境下,这显得尤为重要,因为任何时间或频率偏差都会导致定位错误。
#### 时间同步机制
时间同步通常是通过跟踪接收器到卫星的传播时间来实现的。接收器计算信号传输时间,并通过这个时间差来调整其本地时钟。
```c
// 简化的伪代码示例,展示了时间同步过程
int time_sync() {
int transmission_time = get_transmission_time(); // 获取传播时间
adjust_local_clock(transmission_time); // 调整本地时钟
return transmission_time;
}
```
#### 频率同步机制
频率同步是指调整接收器的本地振荡器,使其与卫星信号的频率一致。频率同步依赖于精确的多普勒频移测量。
```c
// 简化的频率同步过程的伪代码
void frequency_sync() {
float doppler_shift = measure_doppler_shift(); // 测量多普勒频移
adjust_local_oscillator(doppler_shift); // 调整本地振荡器频率
}
```
这些同步机制的实现对于高动态GPS接收器来说是至关重要的,因为它们直接影响到定位的准确性和可靠性。
## 2.3 定位误差分析与模型建立
为了提高高动态环境下的定位精度,必须对各种可能的误差源进行分析,并建立相应的误差模型。
### 2.3.1 常见误差源及校正方法
在GPS定位中,存在多种误差源,它们包括卫星钟差、大气延迟、多路径效应和接收器噪声等。
#### 卫星钟差的校正
卫星钟差是由于GPS卫星上的原子钟与地球上的标准时钟之间存在微小的偏差所导致的。校正卫星钟差通常采用以下方法:
- 使用地面控制站广播的钟差参数。
- 通过差分GPS技术进行实时校正。
### 2.3.2 误差模型的建立与优化
误差模型是预测和校正定位误差的关键工具。它们通常基于各种误差源的统计特性来建立,并通过实际测量数据进行优化。
#### 建立误差模型的步骤
误差模型的

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【PelcoD云台控制协议高级教程】:专家级优化策略与扩展功能

参考资源链接:[PelcoD云台控制协议官方完整版:扩展命令与高级功能解析](https://wenku.csdn.net/doc/6401abbecce7214c316e9589?spm=1055.2635.3001.10343)
# 1. PelcoD协议基础与云台控制概览
## 1.1 PelcoD协议简介
PelcoD协议作为安防领
快速精通EnergyPlus模型建立:新手入门至高手速成指南
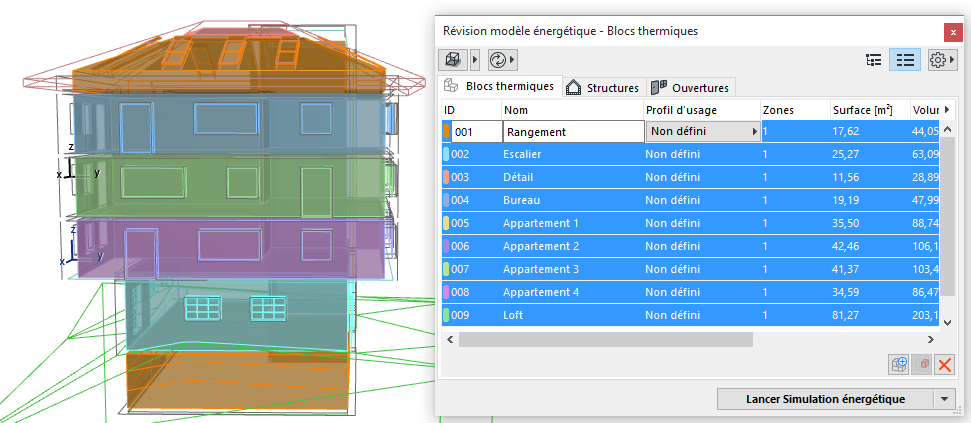
参考资源链接:[EnergyPlus入门教程:参数设置与故障解决详解](https://wenku.csdn.net/doc/6412b77bbe7fbd1778d4a738?spm=1055.2635.3001.10343)
# 1. EnergyPlus简介与模型建立基础
## EnergyPlus简介
EnergyPlus是一款广泛应用于建筑能
ESP32与Arduino IDE的完美结合:简化开发流程的3大策略
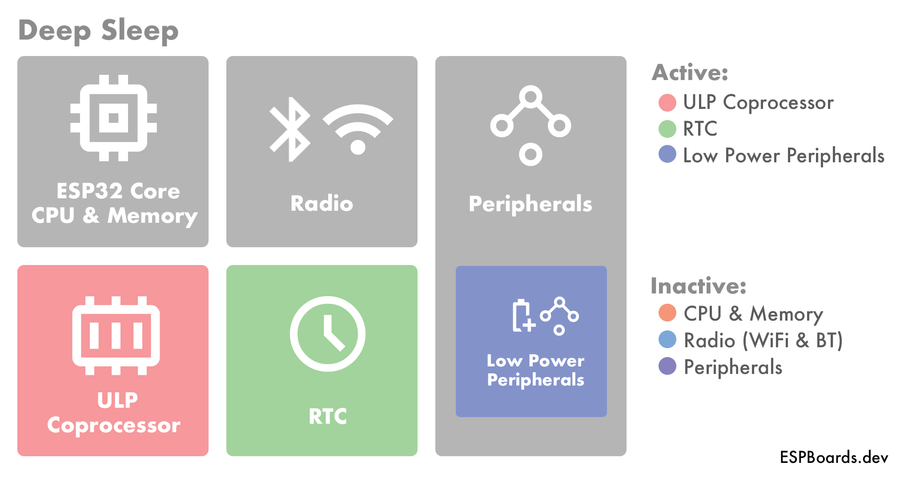
参考资源链接:[esp32_中文技术手册.pdf](https://wenku.csdn.net/doc/645eff63543f8444888a7fae?spm=1055.2635.3001.10343)
# 1. ESP32与Arduino IDE简介
## 1.1 ESP32与Arduino IDE概览
ESP32是Espressif Systems开发的一款低功耗微控制器芯片,它集成了Wi-Fi和蓝牙功能,
【TSMC 0.35um工艺】:提升芯片性能的7大关键策略

参考资源链接:[TSMC 0.35微米工艺库详细技术说明](https://wenku.csdn.net/doc/9tz1kar2fe?spm=1055.2635.3001.10343)
# 1. TSMC 0.35um工艺概述
本章旨在为读者介绍TSMC(台湾半导体制造公司)的0.35微米(um)工艺技术。0.35um工艺是指制程中最小特征尺寸为0.35微米的集成电路制造技术,这是20世纪90
【实操演练】iFix与SQL Server数据同步:一步到位的详细操作手册
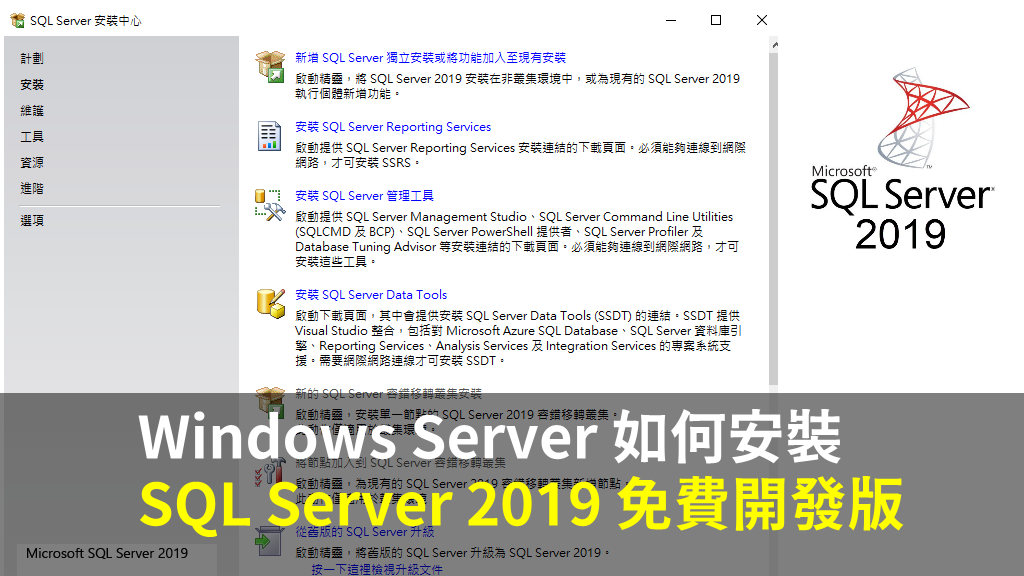
参考资源链接:[iFix组态软件实时数据获取与SQL Server存储步骤](https://wenku.csdn.net/doc/6412b762be7fbd1778d4a19f?spm=1055.2635.3001.10343)
# 1. iFix与SQL Server数据同步概述
## 1.1 数据同步的基本
【VHDL细节解析】:打造高性能8位CPU指令集的秘诀
参考资源链接:[VHDL_8位CPU设计_包含程序](https://wenku.csdn.net/doc/6401ad2dcce7214c316ee936?spm=1055.2635.3001.10343)
# 1. VHDL基础与CPU设计概述
在这一章中,我们从VHDL语言的简介开始,它是一种用于描述电子系统的硬件描述语言,广泛应用于FPGA和ASIC设计中。VHDL的语言结构十分
从零开始的IIS配置教程:轻松实现大文件上传支持

参考资源链接:[IIS设置大文件上传:解除30MB限制](https://wenku.csdn.net/doc/6w7fo70mwj?spm=1055.2635.3001.10343)
# 1. IIS基础与架构概览
## 1.1 IIS简介
Internet Information Services (IIS) 是 Microsoft 提供的一套用于Windows Server操作系统的Web服务器软件。IIS支持多种网络协
【3D打印革命】:美的如何将3D打印技术应用于制造业创新
参考资源链接:[美的三年智能制造规划:精益智能工厂与数字化转型策略](https://wenku.csdn.net/doc/74kekgm9f1?spm=1055.2635.3001.10343)
# 1. 3D打印技术简介与制造业变革
## 1.1 3D打印技术的起源与发展
3D打印技术,又称为增材制造,最初起源于20世纪80年代。它是一种通过逐层添加材料来制造三维实体的技术。在过去的几十年中,3D打印已经从一个简单的原
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )