【NEO-6M GPS模块终极指南】:新手到专家的完整成长路线图
发布时间: 2024-12-14 13:05:38 阅读量: 6 订阅数: 2 
参考资源链接:[NEO-6M GPS模块使用说明](https://wenku.csdn.net/doc/6412b706be7fbd1778d48d3b?spm=1055.2635.3001.10343)
# 1. NEO-6M GPS模块简介和应用场景
NEO-6M GPS模块是基于新一代GPS技术的高性能GPS模块,它具有体积小巧、性能稳定、定位准确等特点。广泛应用于汽车导航、个人手持定位设备、无人机航向控制、测绘设备以及各种需要高精度时间同步的应用场景。NEO-6M模块通过内置高性能的GPS射频芯片,能够实现快速定位,同时支持多种接口协议,如NMEA和UBX协议,为用户提供了丰富的应用可能。本章将简要介绍NEO-6M GPS模块的基本特性,并探讨其广泛的应用场景,为后续深入技术剖析和应用实践打下基础。
## 1.1 NEO-6M模块的基本特性
NEO-6M模块提供强大的功能,包括但不限于以下几点:
- **高灵敏度接收器:** 这保证了在建筑物密集的城市或在树木遮蔽的区域仍能可靠接收信号。
- **快速定位功能:** 初次开机后仅需几秒即可完成定位,复位后重新定位时间更短。
- **多种导航系统支持:** 兼容GPS和GLONASS两种全球卫星导航系统。
## 1.2 NEO-6M模块的主要应用场景
NEO-6M模块的应用场景包括但不限于:
- **汽车导航:** 为车载导航系统提供实时位置信息。
- **户外运动:** 如徒步、登山等,用于追踪运动轨迹和速度。
- **无人机航拍:** 精确控制飞行器位置,提高航拍图像质量。
- **位置追踪:** 用于儿童和老年监护设备,实现位置监测功能。
随着物联网的发展,NEO-6M模块也被集成到各种智能设备中,如智能手表、宠物追踪器、车载记录仪等,其应用范围仍在不断拓宽。在接下来的章节中,我们将深入探讨NEO-6M模块的硬件和软件基础,以及如何将其应用于实际项目中。
# 2. NEO-6M模块的硬件和软件基础
## 2.1 NEO-6M模块的硬件结构
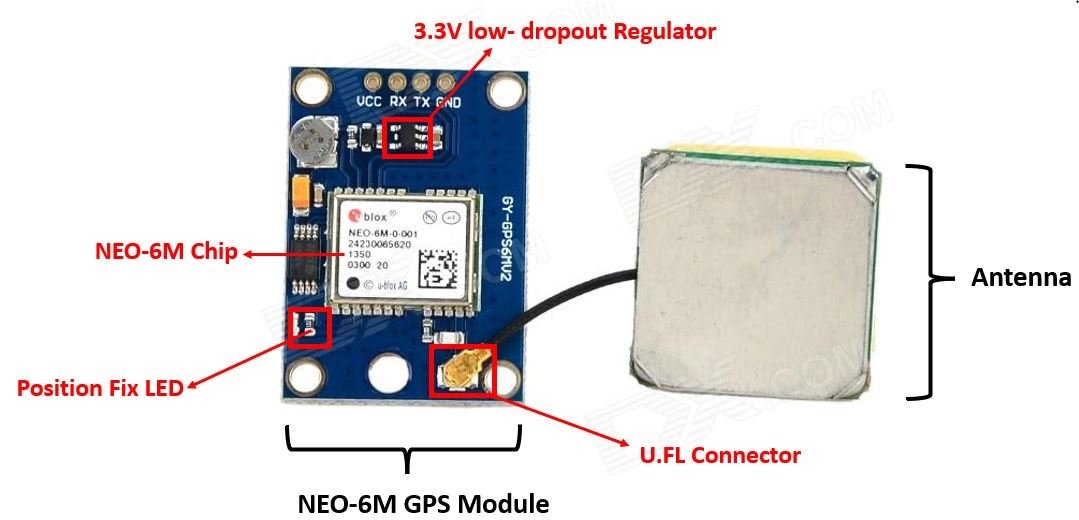
### 2.1.1 主要组件介绍
NEO-6M GPS模块由几个关键的硬件组件构成,这些组件共同工作以提供精确的地理位置信息。模块的中心是GPS接收器芯片,它负责从卫星接收信号,并执行复杂的算法来计算位置、速度和时间信息。一个典型的NEO-6M模块还会包括一个存储芯片(如EEPROM),用于存储配置和固件数据,以及一个低噪声放大器(LNA),可以增强接收信号的质量。
此外,NEO-6M模块通常会有一个外部电源管理电路,以确保模块能够在不同的供电条件下稳定运行。模块的接口通常包括一个标准的TTL UART接口,用于与外部设备通信。
```mermaid
graph LR
A[GPS Antenna] --> B[RF Front-end]
B --> C[GPS Receiver Chip]
C --> D[Memory (e.g., EEPROM)]
C --> E[Power Management Circuit]
D --> F[Microcontroller/Computer]
E --> F
```
### 2.1.2 电气特性分析
NEO-6M模块的电气特性包括电源要求、输入输出电压和信号电平等。这些参数对于正确地集成和操作模块至关重要。典型的NEO-6M模块工作在3.3伏电源下,接收和发送逻辑电平也遵循3.3伏标准。模块的输入输出接口通常是TTL(晶体管-晶体管逻辑)电平,这要求与之通信的设备也有相应的逻辑电平兼容。
在电气特性中,也必须考虑模块的功耗、工作温度范围和抗干扰能力。例如,NEO-6M模块应当能在极端温度条件下正常工作,并且具备一定程度的电磁兼容性(EMC)。
## 2.2 NEO-6M模块的通信协议
### 2.2.1 NMEA 0183标准解析
NMEA 0183是一种广泛使用在GPS设备中的通信协议,它定义了设备之间传输数据信息的格式。NEO-6M模块支持输出多种NMEA消息,包括GPGGA、GPGLL、GPRMC等,每种消息包含不同类型的定位数据。NMEA消息通常以文本格式呈现,容易被人类读取和解析。
解析NMEA消息通常涉及以下步骤:
1. 识别消息类型,例如,以`$GPGGA`开头的消息表示是全球定位系统定位信息。
2. 分割消息,每个消息都由逗号分隔的数据字段组成。
3. 解析数据字段,例如,时间、经度、纬度等。
4. 处理错误检测字段(如校验和)以确保数据的正确性。
```plaintext
$GPGGA,123519,4807.038,N,01131.000,E,1,08,0.9,545.4,M,46.9,M,,*47
```
### 2.2.2 UBX协议的高级特性
UBX是u-blox公司开发的二进制协议,较之NMEA协议,UBX提供了更高级的特性,包括更高的传输效率和更丰富的数据类型。UBX协议采用的是二进制格式,它将数据封装在特定的消息结构中,这通常需要专门的库或工具来解析。UBX消息包括同步标记、消息ID、消息长度、负载数据和校验和等字段。
要解析UBX消息,开发者需要:
1. 读取消息的同步标记,以确定消息的开始。
2. 解析消息ID,以识别消息类型。
3. 根据消息ID读取消息长度并获取负载数据。
4. 计算并验证校验和。
```plaintext
// UBX header example
0xB5 0x62 0x06 0x24 0x10
```
## 2.3 NEO-6M模块的软件设置
### 2.3.1 使用AT指令进行配置
NEO-6M模块可以通过AT指令进行配置。AT指令集提供了一种灵活的方式来设置模块参数,如波特率、输出消息类型、定位参数等。在发送AT指令前,确保模块已处于命令模式。常用的基本AT指令包括:
- `AT+PMTK251,1` - 设置更新率为1Hz。
- `AT+PMTK314,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0` - 启用或禁用特定的NMEA消息。
```plaintext
// Enable GPGGA and GPGLL sentences at 1Hz
AT+PMTK314,0,1,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0
// Set update rate to 1Hz
AT+PMTK251,1
```
### 2.3.2 配置软件的选择和使用
除了使用AT指令通过串口配置NEO-6M模块外,还可以使用一些配置软件,例如u-center或GPS Configurator。这些软件提供了图形用户界面,可以更直观地配置模块参数、查看实时数据和监控模块状态。配置软件的使用步骤通常包括:
1. 连接NEO-6M模块到计算机。
2. 启动配置软件并选择正确的COM端口。
3. 检测模块并加载当前配置。
4. 进行必要的配置更改,如修改波特率或输出的消息类型。
5. 将更改写入模块并保存配置。
使用配置软件可以大大简化设置过程,特别是对于那些不熟悉AT指令集的用户来说,它提供了一个更容易上手的选项。然而,要实现高级或特定的配置,对AT指令的了解仍然是必需的。
# 3. NEO-6M模块的连接和初始化
## 3.1 硬件连接指南
### 3.1.1 接线图和接线注意事项
NEO-6M GPS模块的硬件连接是确保其正常工作的基础。在连接模块前,需要先准备相应的电源和外围设备。通常,NEO-6M模块通过UART接口与控制器(如微控制器、计算机等)进行通信。以下是NEO-6M模块的典型接线方法:
1. **电源连接**:模块通常使用3.3V或5V电源供电。务必确保供电稳定,避免电压波动。
2. **TX/RX连接**:将NEO-6M的TX(发送)引脚连接到控制器的RX(接收)引脚,将NEO-6M的RX引脚连接到控制器的TX引脚。
3. **GND连接**:将NEO-6M的GND引脚连接到控制器的GND引脚,以共地。
接线时,应确保连接正确,以免造成硬件损坏。连接完成后,可以根据模块的数据手册检查连接是否符合要求。
为了更清晰地展示接线步骤,以下是NEO-6M模块连接到Arduino的示例接线图:
```mermaid
flowchart LR
A[NEO-6M GPS模块] -->|RX| B[Arduino TX]
A -->|TX| C[Arduino RX]
A -->|GND| D[Arduino GND]
A -->|VCC| E[Arduino 5V]
```
在实际操作中,接线应注意以下几点:
- 确保供电电压正确,防止因电压过高或过低造成模块损坏。
- 在连接过程中,拔下电源,防止短路或静电损坏模块。
- 使用适当长度和规格的导线,以减少信号干扰。
### 3.1.2 电源和外围设备的配置
在连接NEO-6M模块之前,必须先配置好电源和外围设备。这包括为模块提供稳定的电源以及连接必要的外围设备,如天线和指示灯。
1. **电源配置**:NEO-6M模块根据不同的型号,可能需要3.3V或5V电源。请根据模块的数据手册选择正确的电源电压。建议使用稳压电源,并且确保输出电流足以支持模块及其外围设备的正常工作。
2. **天线连接**:NEO-6M模块需要连接合适的天线以接收GPS信号。通常模块会自带内置天线,但在信号较弱的环境中,建议使用外部天线以提高接收效果。连接天线时,需要确保天线位置开阔,远离干扰源。
3. **指示灯连接**:为了更好地观察模块的工作状态,可以连接一个指示灯。模块通常有PWR LED和RX/TX LED。PWR LED在模块供电时应该亮起,而RX/TX LED则会在数据传输时闪烁。
在连接完电源和外围设备后,可以使用万用表测量各个引脚的电压,确保一切配置正确无误。此外,务必检查接线无误后,再为模块通电。
## 3.2 软件初始化流程
### 3.2.1 初次使用设置步骤
初次使用NEO-6M GPS模块时,需要通过软件对其进行初始化设置。这一过程通常包括选择正确的通信端口、设置波特率以及其他相关参数。
1. **选择通信端口**:在连接好硬件后,首先需要确定控制器与NEO-6M模块通信所使用的串口。在Arduino IDE中,可以通过“工具”菜单下的“串口”选项来选择对应的端口。
2. **设置波特率**:NEO-6M模块的默认波特率为9600,但也可以根据需要进行调整。在Arduino IDE中,通过“工具”菜单下的“波特率”选项来设置对应的波特率。
3. **发送AT指令**:通过串口监视器发送AT指令,测试模块是否正常响应。例如,可以发送“AT”指令检查模块是否能够正常回显。
```cpp
Serial.begin(9600);
Serial.println("AT");
delay(1000);
```
4. **配置NMEA语句输出**:NEO-6M模块默认输出GPRMC和GPGGA语句。如果需要其他语句,可以发送特定的AT指令来配置。例如,发送“AT+NavRate=1000”指令,可以将数据输出间隔设置为1秒。
```cpp
Serial.println("AT+NavRate=1000");
delay(1000);
```
### 3.2.2 固件升级和故障排查
随着时间的推移和技术的发展,可能会有新的固件版本发布,以提升性能或修复已知问题。NEO-6M模块支持通过串口进行固件升级。
**固件升级步骤**:
1. 下载最新的固件文件。
2. 使用NEO-6M模块支持的升级工具,例如u-center等。
3. 在升级工具中打开模块的串口。
4. 加载下载的固件文件,并开始升级过程。
```text
连接模块 -> 打开串口 -> 加载固件 -> 开始升级
```
在升级过程中,务必确保不要断电或断开连接,以防止固件升级失败导致模块损坏。
**故障排查**:
如果在使用过程中遇到问题,可以通过以下步骤进行故障排查:
1. **检查硬件连接**:确认所有的硬件连接是否正确无误,特别是电源和地线连接。
2. **串口监视器日志**:打开串口监视器查看输出信息,检查模块是否有响应以及是否有错误信息。
3. **复位模块**:有时模块响应不正常,可能是由于软件状态异常。可以尝试发送“AT+RESET”指令复位模块。
4. **查阅文档**:如果上述步骤都无法解决问题,应该查阅NEO-6M模块的数据手册,看是否能找到解决方案或与模块的制造商联系获取帮助。
通过以上步骤,可以完成NEO-6M GPS模块的初次使用设置以及故障排查。在实际应用中,建议开发者定期检查和更新固件,以获得最佳性能和最新的功能支持。
# 4. NEO-6M模块的数据处理和应用开发
在这一章,我们将深入探讨NEO-6M模块如何处理GPS数据,以及如何将这些数据集成到各种应用中。从解析NMEA和UBX数据包开始,逐步分析如何利用这些数据进行应用开发,以及开发实践案例,帮助读者理解如何将NEO-6M模块用于具体的项目开发中。
## 4.1 数据解析和使用
### 4.1.1 解析NMEA数据包
NMEA 0183是一种常用的串行通信协议,用于数据的传输。NEO-6M模块能够输出多种格式的NMEA语句,其中最常用的是GGA、GSA、GSV和RMC等。要解析这些NMEA数据,我们通常会使用特定的算法来提取位置、时间、速度等信息。
下面是一个简单的Python脚本示例,用于解析NMEA格式的GPS数据:
```python
import serial
import time
ser = serial.Serial('/dev/ttyUSB0', 9600) # 配置串口参数
while True:
if ser.in_waiting:
line = ser.readline().decode('utf-8') # 读取串口数据
if "$GPGGA" in line:
parts = line.split(',')
timestamp = parts[1]
latitude = parts[3]
longitude = parts[5]
# 进一步解析其他感兴趣的数据...
print(f"Timestamp: {timestamp}, Latitude: {latitude}, Longitude: {longitude}")
```
这段代码通过串口读取GPS模块输出的数据,检查是否为GPGGA数据类型,然后解析出时间戳、纬度和经度信息。需要注意的是,实际应用中可能需要更复杂的错误检查和异常处理逻辑。
### 4.1.2 解析UBX数据包
UBX协议是u-blox公司开发的一种二进制协议,相比NMEA,它能够提供更多的数据和更精确的定位信息。UBX数据包格式更复杂,但数据量更小,效率更高。
下面是一个简化的Python示例,展示了如何解析UBX协议中的位置数据:
```python
import serial
import struct
ser = serial.Serial('/dev/ttyUSB0', 9600)
def parse_ubx(data):
# UBX头部为固定的0xB5 0x62
if data[:2] != b'\xb5\x62':
return
msg_class, msg_id = struct.unpack('BB', data[2:4])
if msg_class == 0x01 and msg_id == 0x07: # 对于UBX-NAV-POSLLH消息
latitude, longitude = struct.unpack('<dd', data[24:40])
# 解析出的数据进一步处理...
while True:
if ser.in_waiting:
ubx_packet = ser.read(ser.in_waiting)
parse_ubx(ubx_packet)
```
该代码通过结构化方式读取并解析UBX协议中的数据包,重点在于识别和解析GPS定位信息。UBX协议的解析相对复杂,涉及到二进制数据的处理,因此对数据格式的了解是前提。
## 4.2 开发实践案例
### 4.2.1 基于Arduino的定位系统开发
利用NEO-6M模块进行基于Arduino的定位系统开发,可以通过串口读取模块输出的数据,并将解析后的坐标用于各种项目,例如追踪器、导航仪等。
下面的示例代码展示了如何将NEO-6M与Arduino连接,并输出位置数据:
```cpp
#include <SoftwareSerial.h>
SoftwareSerial mySerial(10, 11); // RX, TX
void setup() {
// 开始串行通信
Serial.begin(9600);
while (!Serial) {
; // 等待串行端口打开
}
mySerial.begin(9600);
}
void loop() {
if (mySerial.available()) {
String data = mySerial.readStringUntil('\n');
Serial.println(data); // 输出读取到的数据
}
}
```
### 4.2.2 基于树莓派的导航应用实例
树莓派是另一个流行的平台,可以用来开发复杂的GPS应用。通过连接NEO-6M模块和树莓派,可以实现多种导航和跟踪功能。
下面是一个基于Python的示例,展示了如何在树莓派上读取NEO-6M模块的NMEA数据:
```python
import serial
import time
ser = serial.Serial('/dev/ttyUSB0', 9600)
while True:
if ser.in_waiting:
line = ser.readline().decode('utf-8')
# 这里可以添加对NMEA数据的解析代码...
print(line)
```
通过这两个实践案例,我们可以看到如何使用NEO-6M模块在不同平台上进行开发,并实现各种功能。在接下来的章节中,我们将探讨如何进行性能优化和故障诊断,以及探索NEO-6M模块的高级应用。
# 5. NEO-6M模块的性能优化与故障诊断
性能优化与故障诊断是NEO-6M模块稳定工作的关键所在。在这一章节中,我们将深入探讨如何提高NEO-6M模块的信号接收和定位精度,以及面对故障时的诊断策略和解决方法。这一章节旨在为读者提供一系列实用的技巧和工具,以确保NEO-6M模块能够在各种应用场景中表现最佳。
## 5.1 信号增强技巧
随着现代技术的发展,GNSS接收器的信号增强技术也在不断创新。NEO-6M模块通过多种方式可以实现信号质量的提升。
### 5.1.1 天线类型和选择
NEO-6M模块的性能在很大程度上取决于所使用的天线类型。不同的天线适用于不同的环境和应用场景。以下是常见类型的天线及其特点:
- **Patch天线**:体积小,便于集成,适合移动设备。然而,它们通常对多路径效应较为敏感。
- **Helical天线**:这类天线具有良好的全向覆盖能力,适合于户外的便携式设备。
- **Patch Array天线**:通过多个Patch天线的组合使用,能够实现更好的信号增益。
选择合适的天线时,需要考虑以下因素:
- 设备的物理尺寸限制
- 应用场景中的信号衰减程度
- 设备所在位置的多路径效应强度
### 5.1.2 提高定位精度的方法
除了选择合适的天线之外,还有其他几种方法可以提高NEO-6M模块的定位精度:
- **使用辅助定位技术**:例如差分GPS(DGPS)或广域增强系统(WAAS),这些系统能够提供更准确的定位信息。
- **数据后处理**:采集原始数据后,在后端进行更复杂的计算,以提高精度。
- **环境优化**:确保天线安装在能够接收到清晰天空视野的位置,避免高楼、树木等障碍物的遮挡。
在优化信号增强的过程中,保持模块的固件是最新的也同样重要,因为固件更新可能包含提升性能和定位精度的改进。
## 5.2 故障诊断与排除
即使是最精心配置的系统也可能遭遇故障。故障诊断是一个系统化的过程,它要求我们能够识别并解决模块运行中出现的问题。
### 5.2.1 常见问题分析
NEO-6M模块可能遇到的一些常见问题包括:
- **定位不准确**:原因可能是天线位置不当、多路径效应、卫星信号受阻或固件问题。
- **接收不到信号**:可能是由于天线损坏、连接问题、模块故障或周围电磁干扰。
- **数据输出问题**:可能是由于配置错误、串口通信问题或其他软件相关的问题。
### 5.2.2 调试工具和日志分析
正确诊断问题的第一步是使用合适的工具收集有关模块行为的信息。一些有用的工具包括:
- **串口监视器**:用于实时监控NEO-6M模块输出的数据。
- **LED指示灯状态检查**:通过查看NEO-6M模块上的LED指示灯状态,可以初步判断模块是否正常工作。
- **日志分析**:分析模块运行日志,可以帮助识别软件错误或通信故障。
利用这些工具,可以执行以下故障排除步骤:
1. 检查硬件连接是否正确无误。
2. 确认天线位置是否合适,信号是否被遮挡。
3. 重置模块并检查是否有恢复。
4. 查看模块是否输出了错误信息或警告。
5. 更新模块固件,检查问题是否得到解决。
通过这些分析和步骤,大多数NEO-6M模块的问题都能够被及时发现并有效解决。下面是一个示例性的代码块,展示了如何使用串口监视器来检查NEO-6M模块的数据输出。
```bash
# 串口监视器命令(假设使用的是Linux系统)
dmesg | grep ttyUSB0
```
上述命令通过`dmesg`获取系统日志,通过`grep`命令搜索包含`ttyUSB0`字符串的行,`ttyUSB0`代表连接NEO-6M模块的串行端口。
在上述输出结果中,您应该能看到模块初始化信息以及它发送和接收数据的记录。如果检测到错误或者不寻常的行为,应进一步调查问题来源。
```bash
# 示例输出(部分)
[ 22.345678] usb 1-1.3: ttyUSB0: USB Serial Port converter now attached to ttyUSB0
[ 22.356789] nmea: NMEA GPS initialized on ttyUSB0 (8-N-1)
```
在这个例子中,模块成功连接到`ttyUSB0`并开始以NMEA协议格式输出GPS数据。
本节通过深入探讨信号增强技术和故障诊断策略,为NEO-6M模块的用户提供了提升系统性能和解决运行中问题的方法。通过对天线选择的讨论、信号接收的优化,以及对常见问题的分析和使用调试工具,用户应能够使NEO-6M模块达到最佳工作状态,并在出现问题时快速有效地解决。
# 6. NEO-6M模块的高级应用探索
## 6.1 实时数据跟踪系统
### 6.1.1 系统架构设计
在深入探讨实时数据跟踪系统之前,我们需要了解其核心组件和工作原理。一个典型的实时数据跟踪系统通常由以下几个部分组成:
- GPS接收器:NEO-6M模块作为核心,负责捕获卫星信号并提供位置数据。
- 数据处理单元:通常为微控制器或嵌入式计算设备,用于解析NEO-6M模块输出的数据,并进行处理。
- 通信接口:将处理后的数据发送到远程服务器或监控中心,可能使用GSM、Wi-Fi或以太网等技术。
- 软件平台:包含数据接收、处理、显示和存储的应用程序,运行在服务器或云平台。
系统工作流程:
1. NEO-6M模块捕获卫星信号并解算出当前位置。
2. 数据处理单元通过串口与NEO-6M模块通信,获取位置数据。
3. 数据处理单元根据需要对数据进行初步处理,比如时间戳同步、数据包封装等。
4. 经过处理的数据通过通信接口发送至远程服务器。
5. 服务器端接收数据,进行进一步的数据分析、存储和可视化处理。
为确保系统的实时性和准确性,数据传输应尽量减少延迟,同时服务器端应具备高效的数据处理能力。此外,系统应设计有容错机制,比如数据重发机制,以应对通信故障。
### 6.1.2 数据流和存储解决方案
数据流处理和存储是实现有效跟踪系统的关键。根据不同的应用需求,数据流和存储解决方案会有所差异。下面是一个基本的参考架构:
- **实时数据流处理:**
- 利用消息队列(如Kafka或RabbitMQ)来处理和缓冲数据流。
- 实时数据处理引擎(如Apache Storm或Apache Flink)对数据流进行分析和转换。
- 通过WebSockets或REST API将处理后的数据实时展示给用户。
- **数据存储解决方案:**
- 关系型数据库(如PostgreSQL或MySQL)用于存储用户配置信息和一些固定的参考数据。
- 时序数据库(如InfluxDB或TimescaleDB)用于存储高频率、连续的时间序列数据,适合GPS位置数据。
- 对于大数据量的处理,可以考虑使用分布式文件系统(如HDFS)或对象存储(如Amazon S3)。
- **数据备份和恢复:**
- 定期备份数据库数据到可靠的存储介质,如硬盘或云存储服务。
- 实施灾难恢复计划,确保数据的一致性和完整性。
通过以上架构,可以构建出一个可扩展、高可用的实时数据跟踪系统,为各种高级应用场景提供支持。
## 6.2 地理信息系统(GIS)集成
### 6.2.1 基础地理信息处理
GIS(地理信息系统)的集成是将NEO-6M模块的应用推向更高水平的关键一步。GIS能够将位置信息与地图信息结合起来,实现复杂的空间分析和数据可视化。
基础地理信息处理涉及以下步骤:
- **地图数据获取:** 通常从商业或开源GIS数据提供商获取地图数据,这些数据可能包括路网、地表覆盖、行政边界等。
- **数据格式转换:** 根据需要将获取的地图数据转换为GIS软件可以识别的格式,如Shapefile或GeoJSON。
- **数据导入GIS软件:** 在GIS软件中导入基础地图数据,为后续的数据融合和分析做好准备。
### 6.2.2 GIS软件和NEO-6M模块的集成方法
集成NEO-6M模块到GIS软件中,可以通过以下方法实现:
- **直接集成:** 将NEO-6M模块通过串口连接到GIS终端设备,使用支持串口数据读取的GIS软件,如QGIS的Serial Plugin。
- **API集成:** 利用GIS软件提供的API(例如ESRI的ArcObjects或QGIS的PyQGIS),编写脚本或插件,将NEO-6M模块的位置数据实时注入GIS软件。
- **中间件集成:** 使用中间件(如Node.js)来接收和解析NEO-6M模块的数据,然后通过HTTP请求将数据传递给GIS服务器。
通过以上集成方法,用户可以在GIS平台上实时显示设备的位置,进行路径规划、导航、地理空间分析等高级操作。这对于移动资产跟踪、户外导航和空间数据收集等应用非常有用。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【LabVIEW视觉速成课】:快速构建你的首个视觉系统
参考资源链接:[LabVIEW调用DLL指南:结构体与指针处理](https://wenku.csdn.net/doc/6g5m5mt2bn?spm=1055.2635.3001
易语言高效编程:超级列表框双击事件处理的15大黄金法则
参考资源链接:[易语言教程:超级列表框双击事件处理示例](https://wenku.csdn.net/doc/645dfc635928463033a3c835?spm=1055.2635.3001.10343)
# 1. 易语言双击事件基础
## 双击事件概述
在图形用户界面(GUI)编程中,双击事件是指用户两次快速连续点击鼠标左键的操作。易语言作为一款面向中文用户的编程语言,提供了丰富的事件处理机制,其中双击事件是最常见的交互方式之一。对于易语言开发者而言,理解和掌握双击事件的处理是构建互动应用程序的基础。
## 双击事件的基本概念
双击事件通常用于打开文件、执行命令或切换应用程序的状
【HP45喷墨打印头终极指南】:掌握打印头技术规格、维护、故障排除及性能优化

参考资源链接:[HP45喷墨打印头技术详解与DIY指南](https://wenku.csdn.net/doc/1fn71n61ee?spm=1055.2635.3001.10343)
# 1. HP45喷墨打印头概述
在当今数字化工作流程中,喷墨打印技术始终扮演着至关重要的角色。HP45喷墨打印头作为行业内的经典代表之一,拥有其独特的历史地位和广泛
WinCC与PLC通信设置:从新手到专家只需三步
参考资源链接:[WinCC_flexible_SMART_V3SP1、SP2和WinccV7.3、WinccV7.4下载地址](https://wenku.csdn.net/doc/6412b5e8be7fbd1778d44d3e?spm=1055.2635.3001.10343)
# 1. WinCC与PLC通信概述
工业自动化领域中,WinCC和PLC的结合为数据采集、监控和控
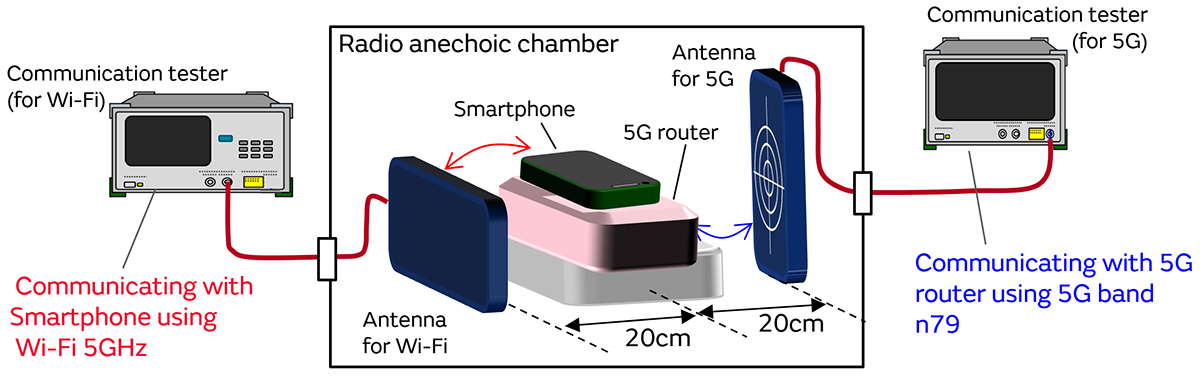
无线通信技术详解:如何用Tse教材习题提升实战技能
参考资源链接:[Fundamentals of Wireless Communication-David Tse -课后习题答案](https://wenku.csdn.net/doc/6412b4cdbe7fbd1778d40e14?spm=1055.2635.3001.10343
【通信协议精通】:IPMB通信协议高级特性与优化指南
参考资源链接:[IPMB与I2C在服务器平台管理中的应用解析](https://wenku.csdn.net/doc/6412b511be7fbd1778d41d41?spm=1055.2635.3001.10343)
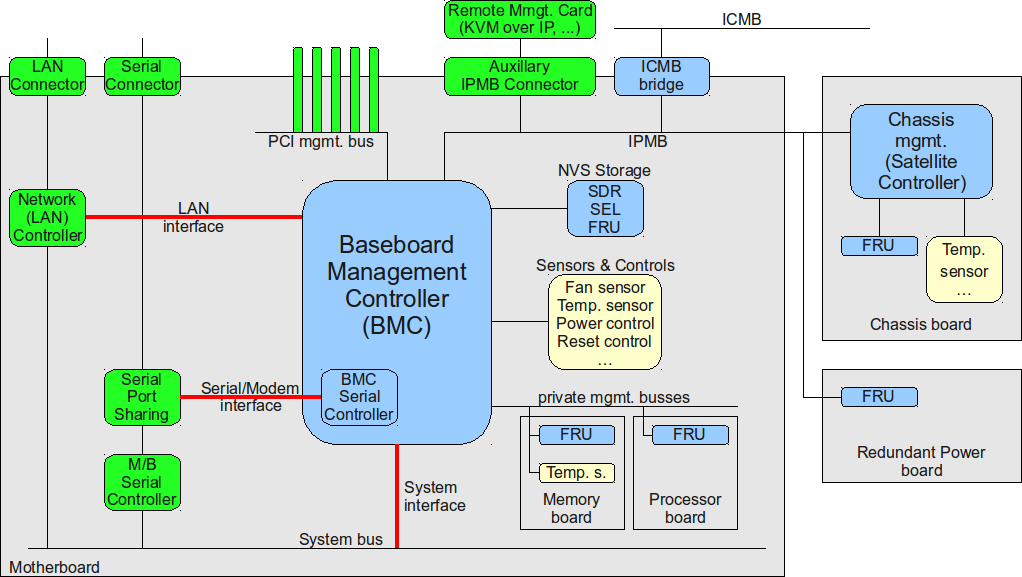
# 1. IPMB通信协议概述
IPMB(Intelligent Platform Management Bus)通信协议是用于计算机、服务器和
【Python代码实践】:跨平台Failed building wheel解决方案大公开

参考资源链接:[解决Python pip安装时'Failed building wheel for xxx'错误](https://wenku.csdn.net/doc/6412b720be7fbd1778d492f4?spm=1055.2635
【谐波齿轮减速器设计挑战】:5大策略应对极端环境
参考资源链接:[谐波齿轮减速器设计与三维建模研究](https://wenku.csdn.net/doc/647be332d12cbe7ec3377731?spm=1055.2635.3001.10343)
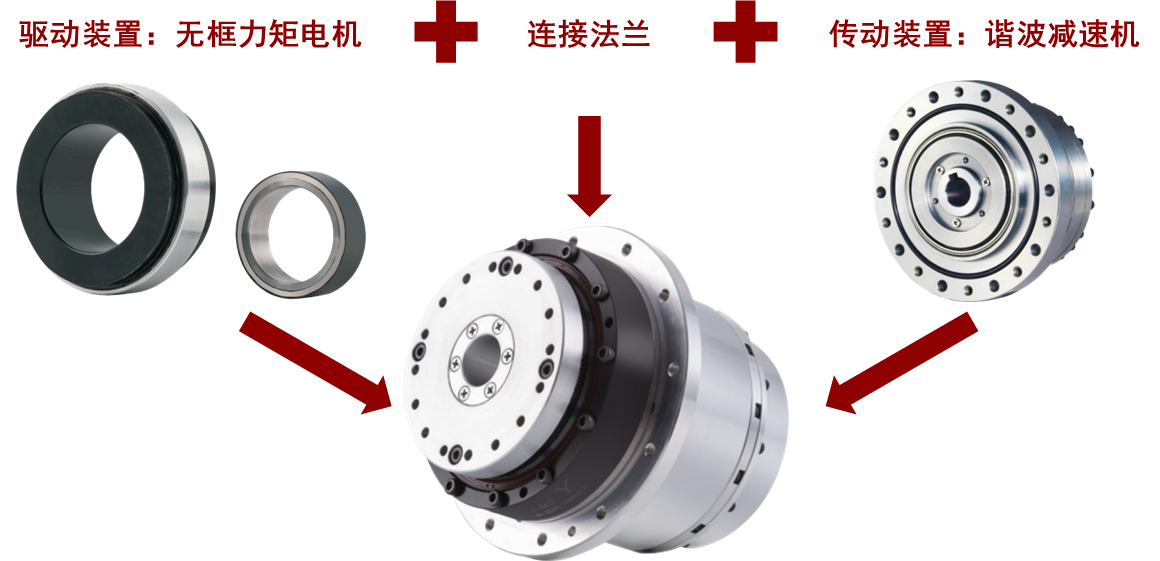
# 1. 谐波齿轮减速器设计基础
谐波齿轮减速器凭借其紧凑的结构和优异的传动性能,在各种精密传动系统中得到了广泛应用。本章将介绍谐波齿轮减速器的基础设计知识,为深入探讨其在极端环境下应
【PADS Layout定制化之路】:个性化BOM的5个自定义字段技巧

参考资源链接:[PADS LAYOUT导出BOM清单教程](https://wenku.csdn.net/doc/2qwcirrnpg?spm=1055.2635.3001.10343)
# 1. PADS Layout与BOM定制化基础
在现代电子制造和设计领域,PADS Layout软件已成为工程师们不可或缺的工具之一。它提供了强大的电路
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )