




【精通RTKLIB 2.4.2:10大秘籍全攻略】


rtklib2.4.2说明书,中文
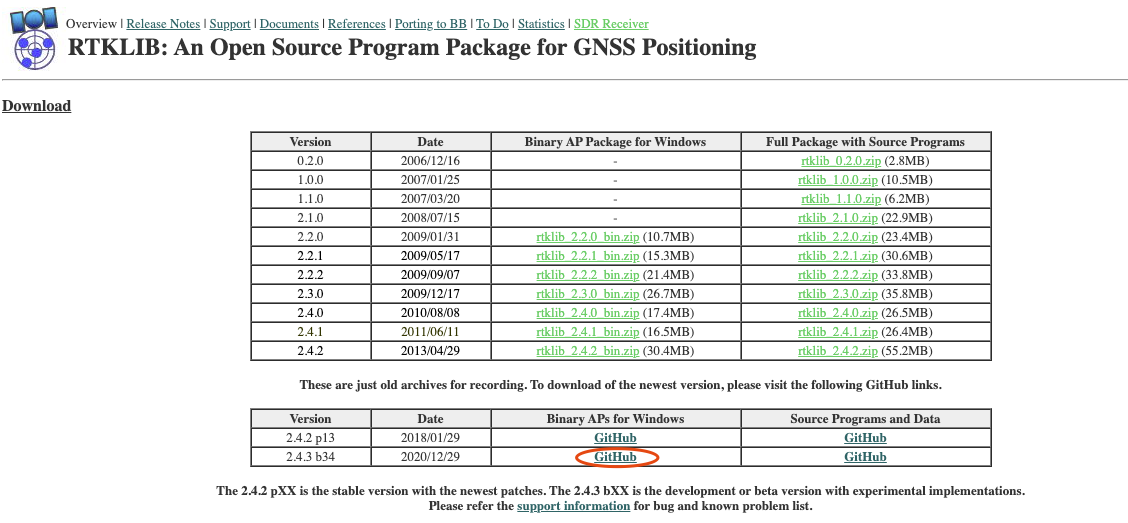
参考资源链接:RTKLIB v2.4.2中文手册:全球导航卫星系统的精准定位
1. RTKLIB概述与安装
简介
RTKLIB 是一个开源的 GPS/ GNSS 数据处理软件,广泛应用于实时或事后高精度定位。它支持多种定位模式和数据格式,可用于研究或生产环境中。
安装指南
安装 RTKLIB 涉及到下载源代码,解压,然后进行编译安装。具体步骤如下:
- 访问 RTKLIB 的官方网站或 GitHub 存储库下载源代码。
- 解压下载的压缩包。
- 根据你的操作系统,查阅官方提供的编译指南,进入解压后的目录进行编译。 以下是在 Linux 系统下编译 RTKLIB 的基本指令示例:
- tar -xzvf rtklib_2.4.3.tar.gz
- cd rtklib_2.4.3/src
- make
注意:在编译前确保你的系统已安装依赖库,如 gcc、make 和 libc 等。
验证安装
安装完成后,通过运行 RTKLIB 的测试程序或示例项目来验证安装是否成功。例如,可以尝试执行以下命令:
- ./rnx2rtkp -h
若显示帮助信息,则表明 RTKLIB 安装成功。
以上步骤为您提供了一个清晰的 RTKLIB 安装流程,如果您遇到任何问题,建议参考官方文档或寻求社区帮助。
2. RTKLIB基础使用技巧
2.1 RTKLIB的配置与初始化
2.1.1 配置文件解读
在使用RTKLIB之前,正确配置软件参数至关重要。配置文件(通常是.conf格式)包含了RTKLIB运行所需的各种设置,包括观测数据的类型、采样率、导航解算算法、输出选项等。
每个配置项的设置都应该根据实际的应用场景来调整。例如,对于静态测量,可以使用更长的积分时间来获得更高的精度;而对于动态应用场景,则可能需要更短的积分时间以适应快速变化的环境。
下面是一个配置文件的示例:
- ; General settings
- pos1-frequency=1
- pos1-satellite=GPS
- pos1-ionosphere=Broadcast
- pos1-troposphere=Saastamoinen
- pos1-ambiguity=Fix-and-hold
解读:
pos1-frequency: 设置数据的采样率。pos1-satellite: 指定使用的卫星系统。pos1-ionosphere: 选择电离层改正的模式。pos1-troposphere: 选择对流层改正的模式。pos1-ambiguity: 设置整周模糊度的解算策略。
配置文件中的每一条注释行(以;开头)都是为了说明该设置项的作用,方便用户进行调整。
2.1.2 初始化流程和注意事项
初始化是启动RTKLIB并准备进行定位计算的过程。在开始之前,需要考虑以下注意事项:
- 确保所有硬件设备(如接收器、天线)已正确安装并校准。
- 配置文件需要根据实际任务需求进行相应的修改。
- 确保接收器可以获取到足够数量的卫星信号。
初始化过程一般包括以下步骤:
- 启动RTKLIB软件。
- 载入配置文件。
- 连接到接收器,并确保数据流是活跃的。
- 检查数据质量,确保没有明显的错误或丢失数据。
- 开始记录数据,准备进行定位计算。
在初始化过程中,需要时刻关注软件的输出信息,以确保每一步都按预期执行,任何异常都应及时处理。
2.2 RTKLIB的观测数据处理
2.2.1 数据格式与转换
RTKLIB支持多种GNSS接收器的数据格式,如RINEX、Novatel、Trimble等。在实际使用中,数据格式转换是一个常见的需求,以便进行跨平台的数据共享和处理。
例如,将Trimble数据格式转换为RINEX格式可以通过以下代码实现:
- $ convbin -f trm2rnx -o rinex_filename.rnx trimble_filename.trm
参数解释:
-f trm2rnx: 指定转换格式为从Trimble转换到RINEX。-o rinex_filename.rnx: 指定输出的RINEX文件名。trimble_filename.trm: 输入的原始Trimble格式文件名。
数据格式转换后,需要验证转换的正确性,确保数据未损坏且格式正确。
2.2.2 数据质量检验
数据质量检验是确保定位结果准确性的重要步骤。质量检验可以手动进行,也可以通过编写脚本自动化完成。
质量检验通常包括以下方面:
- 卫星可见性:检查是否有足够的卫星信号,并确保信号的强弱符合要求。
- 数据连续性:检查数据是否有间断,间断的数据会对结果产生负面影响。
- 多路径效应:检查数据是否受到多路径效应的影响。
- 周跳检测:周跳会影响定位精度,需要被准确检测并修复。
手动进行质量检验时,可以通过RTKLIB提供的post-processing工具来进行。自动化脚本可以利用RTKLIB提供的库函数读取数据,然后运行质量检测算法。
质量检验的关键在于设置合适的阈值,并对结果进行分析。例如,可以通过以下代码段来检测卫星可见性:
- #include <stdio.h>
- #include <rtklib.h>
- void checkSatelliteVisibility(rtk_t *rtk,观测数据obs_data) {
- for (int i = 0; i < MAXSAT; i++) {
- if (rtk->ssat[i].vs != 0) {
- // Satellite is visible
- printf("Satellite PRN %d is visible.\n", i+1);
- }
- }
- }
在这段代码中,通过遍历rtk->ssat数组中的每个元素,可以检查每个卫星的可见性状态。
2.3 RTKLIB的定位模式解析
2.3.1 单点定位与差分定位
RTKLIB支持多种定位模式,其中最基础的两种是单点定位和差分定位。
单点定位是最简单的定位方式,它使用单台接收器的数据进行位置计算。这种模式的精度受限于卫星信号的误差以及接收器的性能。
- void singlePointPositioning(rtk_t *rtk) {
- // Perform single point positioning
- if(rtk_pos(rtk, 0.0, 1) != 0) {
- // Handle errors
- }
- // Output the positioning result
- rtk_outfile(rtk);
- }
差分定位则是一种改进的定位方法,它结合了至少两台接收器的数据:一台在已知位置的基准站和一台在未知位置的移动站。基准站的观测数据被用来生成差分改正信息,该信息通过特定的通信方式(如UHF无线电、网络等)传输给移动站,从而提高移动站的定位精度。
- void differentialPositioning(rtk_t *rtk, rtk_t *base_rtk) {
- // Perform differential positioning
- // Assume base_rtk contains base station data
- if(rtk_posfix(rtk, base_rtk, 1) != 0) {
- // Handle errors
- }
- // Output the improved positioning result
- rtk_outfile(rtk);
- }
2.3.2 RTK和PPK模式的对比
RTKLIB还支持实时动态定位(Real Time Kinematic, RTK)和事后动态定位(Post-Processing Kinematic, PPK)两种高级定位技术。
RTK在数据采集的同时即进行定位计算,它依赖于实时差分改正信息,能够提供实时的厘米级精度位置数据。RTK的实时性和高精度非常适合如农业机器人、建筑机械定位等需要即时反馈的应用场景。
- void realTimeKinematic(rtk_t *rtk) {
- // Perform RTK with base station data (over the air)
- if(rtk_stream(rtk, 0) != 0) {
- // Handle errors
- }
- // Output the real-time position
- rtk_outfile(rtk);
- }
而PPK则是在数据采集完成后,在电脑上使用差分数据进行位置计算。PPK的优势在于它不依赖于稳定的实时通信,因此在通信条件较差的环境中也能应用。它广泛应用于精度要求更高的静态测量领域。
- void postProcessingKinematic(rtk_t *rtk, rtk_t *base_rtk) {
- // Process previously recorded data with base station data (post-processing)
- if(rtk_process(rtk, base_rtk, 0) != 0) {
- // Handle errors
- }
- // Output the post-processed position
- rtk_outfile(rtk);
- }
表格:定位模式对比
| 特性/模式 | 单点定位 | 差分定位 | RTK | PPK |
|---|---|---|---|---|
| 精度 | 较低 | 较高 | 高 | 高 |
| 实时性 | 无 | 有(条件限制) | 实时 | 后处理 |
| 数据来源 | 单台接收器 | 一台基准站+一台移动站 | 实时差分改正信息 | 已录制的观测数据 |
| 适用场景 | 一般定位 | 实时导航 | 实时导航和测绘 | 静态测量 |
通过上述的分析,用户可以根据实际的应用需求选择最合适的定位模式。
在本章节中,我们探讨了RTKLIB的基础使用技巧,包括配置文件的解读、初始化流程、观测数据的处理、定位模式的选择和对比。这些技巧的掌握对于有效使用RTKLIB至关重要。在下一章节中,我们将深入了解RTKLIB的高级功能,包括网络RTK功能、数据后处理以及在特定领域中的应用案例。
3. ```
第三章:RTKLIB高级功能实战
在这一章节中,我们将深入探讨RTKLIB的高级功能,这些功能能够帮助用户完成更为复杂和精确的测绘任务。首先,我们将详细了解如何通过RTKLIB实施网络RTK功能,它可以帮助用户在没有实际物理参考站的情况下进行定位。接下来,我们会转向RTKLIB的数据后处理,这是提升数据精度和质量的关键环节。最后,我们将探讨RTKLIB在不同领域中的应用,了解它如何满足特定领域的精确测量需求。
3.1 RTKLIB的网络RTK功能
网络RTK(Network Real-Time Kinematic)技术允许用户利用一组分布式参考站网络来提供厘米级的定位精度。RTKLIB通过其网络RTK功能,可以实现高精度定位服务。
3.1.1 虚拟参考站(VRS)的构建
虚拟参考站(VRS)技术通过一个中央处理中心接收来自多个基准站的数据,然后基于用户位置生成一个虚拟参考站。VRS技术的关键在于其能够动态生成,并针对用户具体位置提供高度定制化的差分信号。
中央处理中心通常部署有多个参考站的接收机,这些接收机负责收集原始的GNSS数据。处理中心根据用户的实时位置,使用这些数据计算出一个虚拟的参考站,并将该信号发送给用户。
3.1.2 网络RTK的配置与应用
配置网络RTK需要几个关键步骤:确定网络架构、选择合适的通信方式以及安装和配置中央服务器。用户需要配置的参数包括但不限于数据端口、IP地址、通讯协议等。
- - 确定网络架构:决定是使用一个中心服务器还是多个服务器的网络拓扑。
- - 选择合适的通信方式:RTKLIB支持多种数据通信协议,包括但不限于TCP/IP、NTRIP等。
- - 安装和配置中央服务器:安装RTKLIB核心模块和插件,配置网络参数。
使用网络RTK时,用户接收机只需要连接到网络,并配置好相应的服务器信息即可开始接收信号。
3.2 RTKLIB的数据后处理
数据后处理是测绘工作中的重要环节,指的是采集到的观测数据经过一段时间后再进行处理和分析。RTKLIB提供了强大的数据后处理工具,可以帮助用户进行数据质量检查、定位解算以及导出结果。
3.2.1 后处理功能概述
RTKLIB的后处理功能主要包括以下几个步骤:
- 数据导入:将采集到的GNSS数据导入RTKLIB。
- 数据预处理:进行数据的格式转换、去噪等。
- 解算:使用RTK或PPK方法进行数据解算。
- 结果导出:将解算结果以用户可读的格式导出。
3.2.2 解决方案与案例分析
以一起地籍测量任务为例,我们可以展示RTKLIB如何应用在数据后处理上。在地籍测量中,通常需要对土地边界进行精确测量。
- - 步骤1:数据采集
- - 使用GNSS接收器在土地边界上进行数据采集。
- - 步骤2:数据后处理
- - 将采集到的数据导入RTKLIB。
- - 使用RTKLIB的后处理功能进行数据解算。
- - 步骤3:结果分析与导出
- - 分析解算结果,确保边界精度。
- - 导出坐标数据用于制图和土地管理。
3.3 RTKLIB在特定领域的应用
RTKLIB不仅适用于传统的测绘任务,还可以扩展到特定的应用领域,如地籍测量、农业测绘等。
3.3.1 地籍测量中的应用
地籍测量是一项与法律和财产权相关的测绘工作,需要极高的精度。
- - 地籍图的绘制:使用RTKLIB进行高精度测量,确保地籍图准确无误。
- - 土地分割与合并:通过精确测量,帮助处理土地分割与合并中的边界问题。
3.3.2 农业测绘的应用实例
在农业领域,精确的测绘技术可以帮助农民更好地管理土地,例如进行精准农业。
- - 土壤采样:使用RTKLIB进行精确的采样点定位,以便更好地了解土壤分布。
- - 农作物管理:根据测绘数据优化种植策略,例如灌溉、施肥等。
在这一章节中,我们深入了解了RTKLIB的高级功能,包括网络RTK的构建与应用、数据后处理以及特定领域的应用案例。通过这些实战应用,RTKLIB展现出了在高精度定位和测绘领域的强大能力。

这个命令将指定的原始观测数据文件(.01o)转换为RTKLIB可以处理的格式,并输出预处理后的观测文件(.15n)和卫星导航文件(.15p)。参数-type定义了数据类型,-obs定义了需要观测的卫星,-nav定义了用于差分的导航数据文件。
4.2 RTKLIB的常见问题与解决
4.2.1 软件兼容性问题
当遇到RTKLIB的软件兼容性问题时,通常表现为程序无法打开、错误的输出结果或者异常的终止等。为了确保RTKLIB软件包与操作系统兼容,通常需要考虑以下方面:
- 操作系统版本:检查RTKLIB是否支持你的操作系统版本,部分版本的Windows或Linux可能不被支持。
- 依赖库版本:RTKLIB依赖于多个第三方库,如inetlib、libm不足等,确保这些库的版本兼容RTKLIB。
- 编译环境:如果从源代码安装,需确保编译环境(如g++或gcc版本)符合RTKLIB的编译要求。
表4-1展示了RTKLIB在不同操作系统中的安装兼容性,它可以帮助用户在安装前了解预期的兼容性问题。
| 操作系统 | RTKLIB版本 | 兼容性说明 |
|---|---|---|
| Windows 10 | v2.4.3 | 完全兼容,需要Visual Studio 2015及以上版本进行编译 |
| Ubuntu 18.04 | v2.4.2 | 完全兼容 |
| CentOS 7.6 | v2.4.2 | 需要额外安装依赖库 |
4.2.2 硬件接入和配置问题
与硬件的兼容性问题可能涉及到连接的GNSS接收器和计算机。为了解决此类问题,可以参考以下步骤:
- 检查接口类型:确认连接的GNSS接收器和计算机的接口类型是否匹配,如USB、串口等。
- 检查驱动程序:确认接收器驱动程序是否正确安装在计算机上,以及是否支持当前的操作系统。
- 设置串口参数:确保串口设置与GNSS接收器的通信参数一致,包括波特率、数据位、停止位和校验位。
图4-1是一个连接到计算机的GNSS接收器的示意图,它帮助用户理解硬件接入过程。
4.3 RTKLIB的维护和升级策略
4.3.1 定期维护的要点
定期维护确保了RTKLIB软件包能够稳定运行。以下为维护要点:
- 备份配置文件和数据:在每次更新或维护前备份现有配置文件和关键数据。
- 更新依赖库:检查并更新所有依赖库到最新版本,以获得最新的功能和安全性改进。
- 测试新版本:在生产环境之前,先在测试环境中安装新版本,并进行全面测试。
4.3.2 软件升级的考量与步骤
软件升级需要慎重考虑,以下是升级前后的考量和步骤:
- 评估升级的必要性:评估新版本中加入的新功能或改进是否适用于当前工作流程。
- 查看升级日志:检查新版本的升级日志,了解哪些功能被更改或可能影响现有流程。
- 进行测试:在升级前,先在测试环境中运行新版本,并验证所有现有功能是否正常。
- 备份和恢复:确保有有效的备份和恢复机制,以防升级过程出现问题。
升级RTKLIB的步骤可能涉及解压缩新版本文件、替换旧版本的程序文件,以及重新配置相关参数。以下是一个升级过程的示例代码:
在升级过程中,跟踪日志文件和监控系统运行状态是非常重要的,可以通过查看/var/log/rtklib.log等日志文件来分析可能出现的问题。
以上就是第四章“RTKLIB性能优化与故障排除”的全部内容。接下来,我们将继续探讨RTKLIB的未来发展趋势和应用前景。
5. RTKLIB未来发展趋势与应用前景
随着全球定位系统(GPS)技术的不断进步,RTKLIB作为一款开源的GPS数据处理软件,其应用前景和未来发展趋势备受关注。RTKLIB不仅适用于高精度定位和导航,还可以和其他技术结合,拓展其应用领域。
5.1 RTKLIB技术的未来发展
5.1.1 新算法与新模型的展望
未来的RTKLIB将会融入更多先进的算法和模型来提高其处理效率和精度。例如,基于机器学习的滤波技术有望被引入,以更智能地处理信号失锁和多路径效应等问题。此外,算法优化也在不断进行,比如改进卡尔曼滤波器以适应动态变化的环境,或是使用因子图法等新算法来提高定位的准确性和鲁棒性。
5.1.2 融合新技术的可能性分析
随着物联网(IoT)和云计算的普及,将RTKLIB与这些新兴技术相结合的潜力巨大。例如,可以利用云计算资源来处理大量数据,实现更高效的后处理计算。同时,集成物联网设备,如传感器和摄像头,可以为RTKLIB提供更多的环境信息,进一步增强定位系统的实用性。
5.2 RTKLIB在新兴领域的应用潜力
5.2.1 自动驾驶与导航
自动驾驶技术的发展对定位系统的要求非常高,RTKLIB在这一领域有着广泛的应用前景。利用RTKLIB进行车辆的精确定位,并结合其他传感器数据,可以显著提升自动驾驶系统的导航精度和安全性。RTKLIB可以通过实时差分技术提供厘米级的定位数据,对于实现自动驾驶的精确控制至关重要。
5.2.2 无人机测绘技术与RTKLIB
无人机(UAV)测绘技术的发展同样离不开高精度的定位系统。RTKLIB可以被用于无人机航拍数据的实时处理和后处理,提供精确的位置信息,从而大幅提高地图和模型的精度。集成RTKLIB的无人机系统可广泛应用于农业监测、地形测绘、灾难评估等多个领域。
RTKLIB作为一种成熟且持续发展的开源软件,其在精度提升、算法优化及新应用领域的探索将不断深入。随着技术的发展,RTKLIB有望在新的技术和应用场景中发挥更加关键的作用。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
相关推荐

专栏目录
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【CD4028解码技术揭秘】:精通二进制解码的5个实战案例
【直流电机控制策略】:L298N模块的高效操作指南!
【PCB设计必学技】:电路板布局与设计在电压表项目中的应用
交互体验提升:实现无缝视频播放的Vue-video-player高级技巧
【CPN_Tools软件API使用全指南】:开发者必备的技术手册与实战技巧
【RTL8370N-VB-CG 初学者入门】:5个简单步骤带你进入网络世界
彻底搞懂!FANUC 0i-D PMC编程:20个术语与概念解析
ASP.NET Core全解析:构建快速可靠的Web应用
Mirth Connect 4.1.0错误全解析:问题诊断与解决技巧


专栏目录
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )




















