【差分技术在RTKLIB 2.4.2中的应用:策略与案例分析】
发布时间: 2024-12-15 13:39:37 阅读量: 2 订阅数: 4 

rtklib2.4.2说明书,中文
参考资源链接:[RTKLIB v2.4.2中文手册:全球导航卫星系统的精准定位](https://wenku.csdn.net/doc/6401ac0ecce7214c316ea762?spm=1055.2635.3001.10343)
# 1. 差分技术原理与RTKLIB概述
## 1.1 差分定位的概念
差分定位技术是一种通过对比已知位置点与测量位置点的差异,来提高定位精确度的方法。它包括实时动态定位和后处理两种主要方式。实时动态定位(RTK)可以为需要高精度的移动用户,如农业机械、无人机测绘等提供即时的位置信息。
## 1.2 差分技术的工作原理
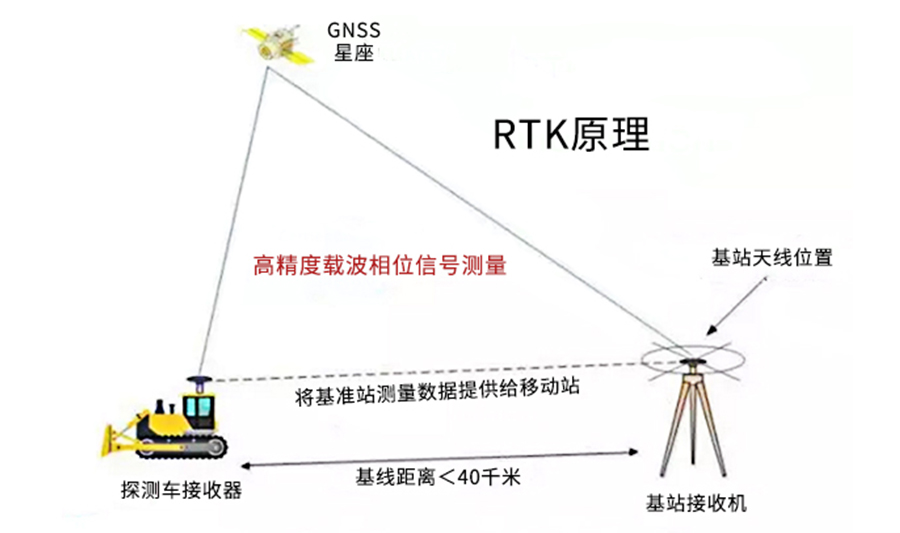
差分技术工作的基本原理是通过已知的基站位置,计算出信号传播过程中的误差,并将这些误差信息发送给移动用户。用户接收这些误差信息后,对自己的测量结果进行修正,从而获得更精确的位置数据。差分技术的关键在于基准站的精度和差分信号的实时性。
## 1.3 RTKLIB概述
RTKLIB是一个开源的GPS/GNSS数据处理软件,它支持多种差分模式,如RTCM、CMR、CMR+等。它不仅能够处理标准的RTK差分技术,还支持事后差分(Post-Processing)和网络RTK等更高级的功能。RTKLIB在个人和工业界都得到了广泛应用,尤其适用于对精度要求较高的应用场景。
# 2. RTKLIB差分技术配置与应用
## 2.1 差分技术基础
### 2.1.1 差分定位的概念
差分定位技术是基于两个或多个接收机同时接收相同卫星信号的一种定位方法。其核心思想是利用已知位置的参考站提供的误差修正信息,帮助移动站进行更精确的定位。参考站计算出误差模型并将其传递给用户,用户通过应用这些信息来改善自己的定位精度。
在一个典型的差分系统中,参考站会进行精确测量,并将观测数据与自身精确已知的坐标进行比较,从而得出各种误差修正值。这些修正值包括但不限于:卫星轨道误差、大气延迟误差等。然后,这些信息会被实时传输给移动用户,移动用户应用这些修正值来提高自己的定位精度。
### 2.1.2 差分技术的工作原理
差分技术的工作原理可以分为以下几个步骤:
1. **参考站定位**:首先,一个或多个参考站需要精确地测量它们的位置,并且知道其确切坐标。
2. **数据收集与处理**:参考站连续采集来自卫星的信号,并计算误差模型,包括卫星轨道误差和大气延迟等。
3. **误差修正信息的生成**:基于上述的误差模型,参考站生成差分修正信息,通常包括伪距修正和载波相位修正等。
4. **信息传输**:差分修正信息通过特定的数据链路实时传输给用户,传输方式可以是无线电波、蜂窝网络等。
5. **用户端应用**:用户端接收设备通过解码接收到的差分修正信息,并将其应用到自身定位计算中,从而获得更精确的位置。
## 2.2 RTKLIB差分模式设置
### 2.2.1 RTKLIB的配置选项解析
RTKLIB是一个开源的GPS/GNSS数据处理软件包,它提供了多种差分模式来支持各种应用场合。用户可以根据自己的需求选择合适的差分模式,并在RTKLIB的配置选项中进行详细设置。
**配置选项概述**:
- **测量模式**:RTKLIB提供了静态、动态、后处理动态和实时动态等多种测量模式。
- **数据源设置**:配置接收机类型、连接方式(串行、网络等)以及数据采集的频率。
- **坐标系转换**:选择适合的应用坐标系统,如WGS-84、地方坐标系等,并设置相应的转换参数。
- **滤波和解算参数**:配置滤波算法(如卡尔曼滤波)和解算参数来获得更平滑或者更快速的解算结果。
### 2.2.2 差分模式的启动与参数调整
启动RTKLIB的差分模式,并进行参数调整,是实现精准定位的关键步骤。这里将详细介绍如何操作和调整RTKLIB的相关参数:
**步骤一:设置工作模式**
在RTKLIB的配置文件中选择相应的工作模式,例如实时动态(RTK)或后处理动态(PPK)。
**步骤二:配置数据输入输出**
指定输入数据的来源和格式,同时设置输出文件的格式,以便于后续分析和存储。
**步骤三:选择参考站**
若使用网络RTK,配置网络RTK服务器的地址;若使用基线模式,则需提供参考站坐标信息。
**步骤四:调整滤波与解算参数**
根据具体的应用需求,调整滤波算法的参数,比如协方差矩阵、处理噪声等。调整这些参数可以改变定位的平滑度和响应速度。
```c
// 例如,调整卡尔曼滤波参数的代码示例
// 这段代码不是实际RTKLIB代码,仅为展示参数调整过程的示例
kalmanFilter.setCovariance(processNoise, observationNoise);
```
在上述示例代码中,`processNoise` 和 `observationNoise` 分别代表过程噪声和观测噪声的协方差矩阵,这两个参数需要根据实际情况进行调整。
**步骤五:启动差分定位**
配置完成后,启动RTKLIB进行差分定位。此时,软件会根据配置文件中设定的模式和参数,实时计算并输出定位结果。
## 2.3 实时差分数据处理
### 2.3.1 实时数据流的解码和处理
实时差分定位依赖于对数据流的快速解码和处理。这要求RTKLIB能够高效地处理接收到的GNSS数据,包括伪距、载波相位、多普勒频移等,并对数据流进行

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
PowerBuilder数据窗口高级技巧:揭秘如何提升数据处理效率
参考资源链接:[PowerBuilder6.0/6.5基础教程:入门到精通](https://wenku.csdn.net/doc/6401abbfcce7214c316e959e?spm=1055.2635.3001.10343)
# 1. 数据窗口的基本概念和功能
数据
ANSYS Fluent UDF 优化秘籍:提升模拟效率的终极指南

参考资源链接:[2020 ANSYS Fluent UDF定制手册(R2版)](https://wenku.csdn.net/doc/50fpnuzvks?spm=1055.2635.3001.10343)
# 1. ANSYS Fluent UDF简介
ANSYS
Tasking编译器最佳实践:嵌入式系统开发的秘籍曝光
参考资源链接:[Tasking TriCore编译器用户指南:VX-toolset使用与扩展指令详解](https://wenku.csdn.net/doc/4ft7k5gwmd?spm=1055.2635.3001.10343)
# 1. Tasking编译器概述及其在嵌入式系统中的作用
在现代嵌入式系统开发中,Tasking编译器扮演着至关重要的角色。Tasking编译器是一类针对特定编程语
【深度剖析FatFS】:构建高效嵌入式文件系统的关键步骤
参考资源链接:[FatFS文件系统模块详解及函数用法](https://wenku.csdn.net/doc/79f2wogvkj?spm=1055.2635.3001.10343)
# 1. FatFS概述与基础架构
FatFS是一个完全用ANSI C编写的通用的 FAT 文件系统模块。它设计用于小型嵌入式系统,例如微控制器,拥有灵活的可配置选项和良好的移植性。本章节将介绍Fat
【处理器设计核心】:掌握计算机体系结构量化分析第六版精髓
参考资源链接:[量化分析:计算机体系结构第六版课后习题解答](https://wenku.csdn.net/doc
【iOS音效提取与游戏开发影响案例研究】:提升游戏体验的音效秘诀

参考资源链接:[iPhone原生提示音提取:全面分享下载指南](https://wenku.csdn.net/doc/2dpcybiuco?spm=1055.2635.3001.10343)
# 1
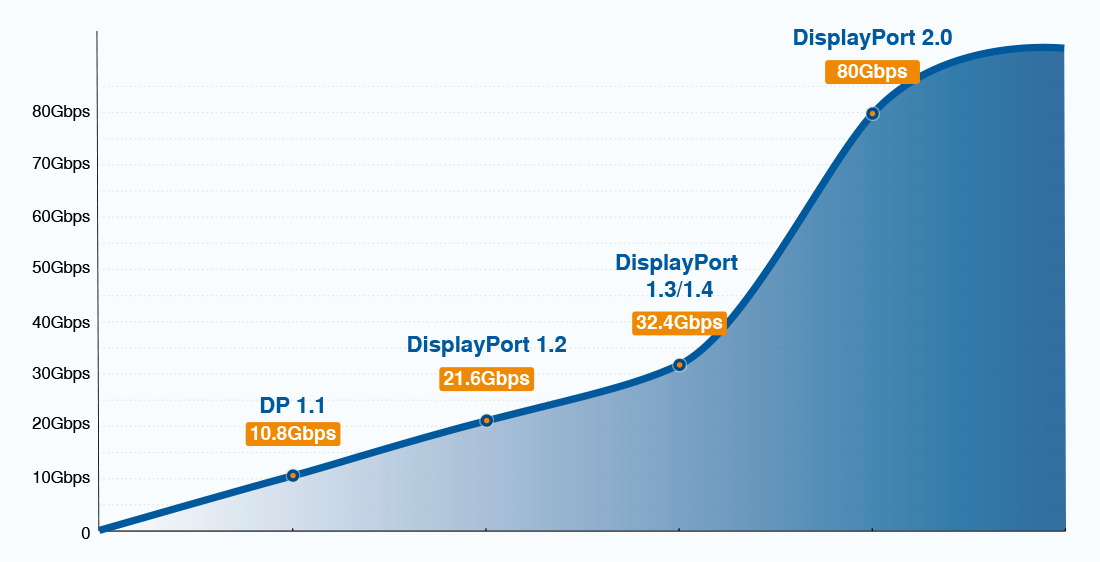
DisplayPort 1.4 vs HDMI 2.1:技术规格大比拼,专家深入剖析
参考资源链接:[display_port_1.4_spec.pdf](https://wenku.csdn.net/doc/6412b76bbe7fbd1778d4a3a1?spm=1055.2635.3001.10343)
# 1. DisplayPort 1.4与HDMI 2.1简介
在数字显示技术的快速演进中,Display
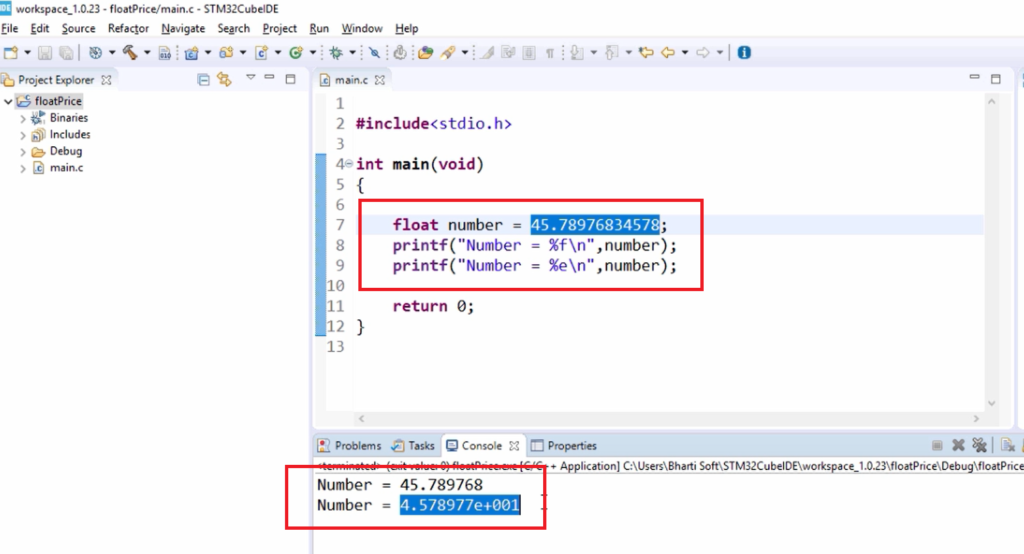
【C语言编程精进】:手把手教你打造高效、易用的计算器
参考资源链接:[编写一个支持基本运算的简单计算器C程序](https://wenku.csdn.net/doc/4d7dvec7kx?spm=1055.2635.3001.10343)
# 1. C语言基础与计算器概念
## 1.1 C语言编程简介
C语言,一种广泛使用的计算机编程语言,具有强大的功能、简洁的语法和高效的执行能力。它诞生于1972年,由Dennis Ritchie开
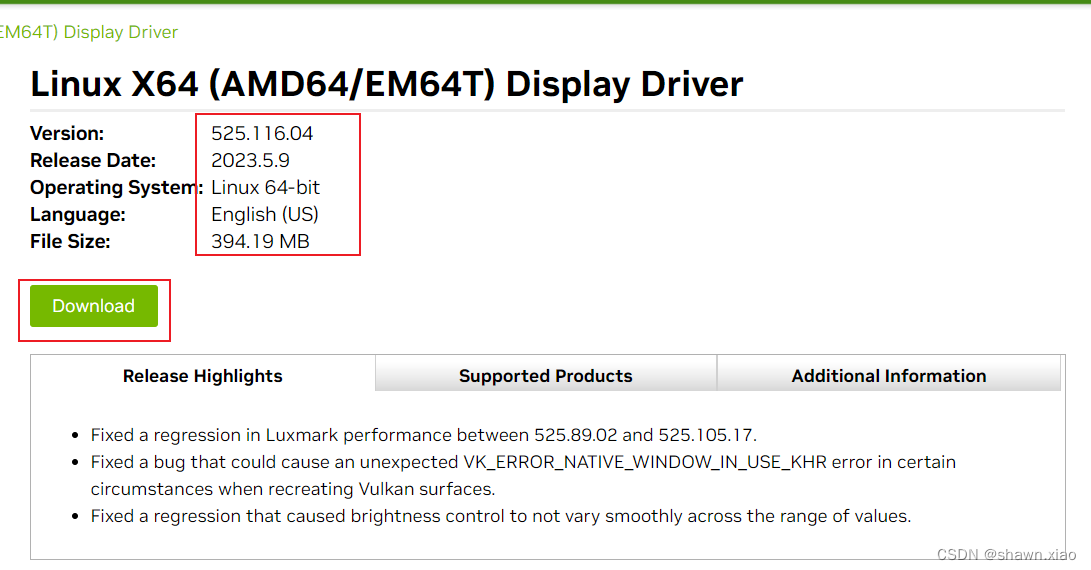
Ubuntu显卡驱动管理:【手把手教学】关键步骤与高级技巧
参考资源链接:[Ubuntu vs Debian:AMD显卡驱动在Debian中的安装教程](https://wenku.csdn.net/doc/frnaypmyjc?spm=1055.2635.3001.10343)
# 1. Ubuntu显卡驱动概述
在当今高速发展的信息技术领域中,显卡驱动扮演着不可或缺的角色,尤其在Linux操作系统,如Ubuntu中,驱动的选择和安装对系统性能和稳定性有着直接影响。Ubun
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )