TC397 MCAL UART多任务处理:协调不同UART任务的高效策略(价值型+实用型+稀缺性)
发布时间: 2024-12-16 07:53:48 阅读量: 1 订阅数: 2 
参考资源链接:[EB Tresos TC397 UART集成与配置指南](https://wenku.csdn.net/doc/3o310ipz1p?spm=1055.2635.3001.10343)
# 1. TC397 MCAL UART多任务处理概述
在现代嵌入式系统中,多任务处理能力是衡量其性能与效率的关键指标之一。本章将为读者提供一个全面的介绍,针对TC397 MCAL UART多任务处理的概念、应用和重要性。我们首先将探讨UART的基本概念及其在多任务环境中的作用,然后概述多任务处理在TC397 MCAL环境下的实现,以及它如何使系统能够同时处理多个通信任务。此外,本章还将简要介绍后续章节所涉及的技术细节和实践策略,为深入研究奠定基础。
## 1.1 UART多任务处理的重要性
UART(通用异步收发传输器)是一种广泛应用于微控制器和计算机系统之间的简单、低成本的串行通信协议。TC397 MCAL(微控制器抽象层)为开发者提供了管理硬件资源的高层接口,是实现多任务处理的有力工具。多任务处理在UART通信中显得尤为重要,因为它允许系统在处理通信任务的同时执行其他并行任务,从而提高整体效率和性能。
## 1.2 TC397 MCAL在UART多任务中的作用
TC397 MCAL扮演了中间件的角色,它抽象和封装了底层硬件的复杂性,简化了开发者对于UART多任务处理的实现。通过MCAL提供的接口,开发者可以更容易地进行中断管理、任务调度和同步,而无需深入理解底层硬件细节。这种抽象使得开发者能够专注于应用程序的业务逻辑,而不是底层的通信机制。
# 2. UART多任务处理的理论基础
### 2.1 UART通信协议详解
#### 2.1.1 UART的基本概念和作用
UART(Universal Asynchronous Receiver/Transmitter,通用异步收发传输器)是一种广泛应用于计算机和微控制器通信的硬件协议。它的主要作用是实现串行通信,即数据的逐位发送,这与并行通信相对,后者在同一时刻通过多个数据线同时发送多个位。在微控制器系统中,UART提供了最为灵活和简单的通信方式,常用于设备间的点对点通信。
UART协议由硬件和软件两部分组成,硬件部分负责数据的收发,软件部分则负责数据格式的设置。UART的关键特性包括波特率(即每秒传输的符号数)、数据位长度、停止位和奇偶校验位。
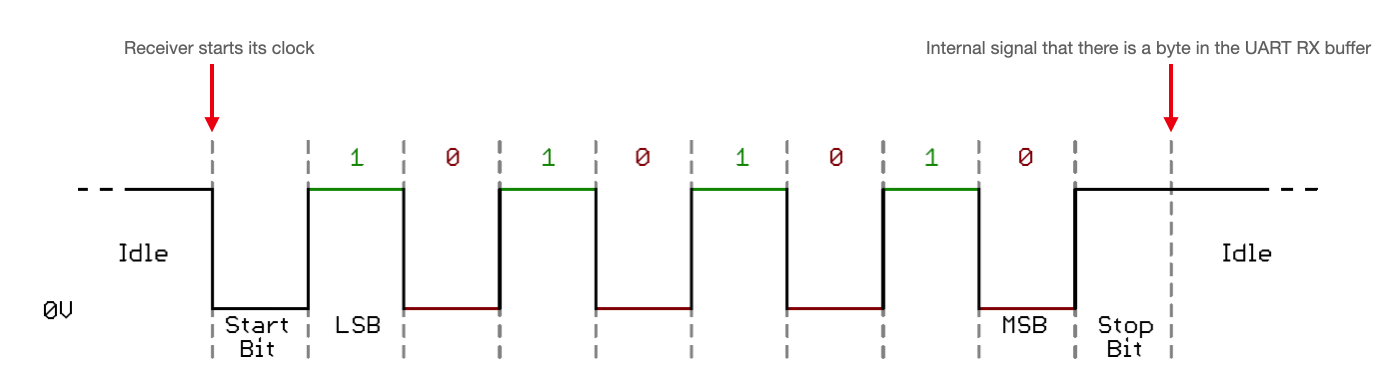
#### 2.1.2 UART数据传输机制和帧结构
UART传输的数据称为帧(Frame),每一帧包含起始位、数据位、可选的奇偶校验位和停止位。起始位通常为低电平,表示数据帧的开始。数据位紧随起始位之后,长度可为5到9位,代表实际要传输的数据。奇偶校验位是可选的,用于错误检测,可以是偶校验或奇校验。停止位通常为1位或2位高电平,表示数据帧的结束。
### 2.2 多任务处理理论
#### 2.2.1 多任务处理的基本原则
在计算机科学中,多任务处理指的是操作系统允许多个任务(即进程或线程)同时运行的概念。这些任务可以共享处理器时间和系统资源。多任务处理的基本原则包括时间共享(Time Sharing)、任务切换(Context Switching)和并发执行(Concurrent Execution)。
时间共享是指通过高速的任务切换来给予用户程序使用CPU时间的感觉。任务切换是操作系统内核的一部分,负责保存当前任务的状态并加载新任务的状态。并发执行是指多个任务在宏观上看起来像是同时进行,但实际上,在微观上可能是交叉执行,共享CPU时间片。
#### 2.2.2 操作系统中的任务调度策略
任务调度是操作系统对多任务处理的控制机制,它决定了何时、如何切换任务。常见的任务调度策略包括轮转调度(Round Robin)、优先级调度(Priority Scheduling)和抢占式调度(Preemptive Scheduling)。
轮转调度为每个任务分配一个固定的时间片来运行,时间片用完则切换到下一个任务。优先级调度则根据任务的优先级来决定执行顺序,优先级高的任务获得更多的执行机会。抢占式调度则引入了中断机制,高优先级任务可以抢占低优先级任务的执行权。
### 2.3 UART多任务环境下的挑战
#### 2.3.1 任务间通信的复杂性
在UART多任务环境下,任务间通信变得复杂。每个任务可能需要独立使用UART进行数据交换,这就需要高效的通信机制来避免数据冲突和保证数据的完整性和顺序性。例如,当两个任务试图同时写入UART时,如果没有适当的同步机制,就可能产生数据覆盖问题。
#### 2.3.2 时间和资源约束的处理
UART多任务处理还面临时间约束和资源限制的问题。由于UART通信通常速率有限,任务间需要合理分配时间和带宽资源,以避免延迟和阻塞。资源管理是多任务系统中的关键挑战,特别是在处理器和内存资源受限的嵌入式系统中。
接下来的章节会深入探讨如何在TC397 MCAL(Microcontroller Abstraction Layer,微控制器抽象层)环境下应对这些挑战,通过实际策略来优化UART多任务处理的性能。
# 3. TC397 MCAL UART多任务处理实践策略
## 3.1 中断管理和任务优先级划分
### 3.1.1 中断服务例程的设计要点
在多任务环境中,中断服务例程(ISR)必须精炼以快速处理UART事件并释放CPU。设计ISR时,需遵循以下要点:
- **最小化处理时间**:ISR应当迅速完成任务,只处理关键决策和数据,复杂的处理应交由后续的任务或工作线程完成。
- **避免阻塞操作**:应避免在ISR中进行耗时操作,如IO读写,以减少系统对中断的响应延迟。
- **使用原子操作**:在多任务环境中,对共享数据的访问必须是原子性的,以避免竞态条件。
- **中断嵌套**:合理配置中断优先级,允许更高优先级的中断打断当前ISR的执行。
```c
// 伪代码示例
void UART_ISR() {
if (UART_InterruptReceived()) {
// 立即处理关键任务
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
MODSCAN32专家操作手册:解锁MODBUS通讯的高效工具使用技巧

参考资源链接:[基于MODSCAN32的MODBUS通讯数据解析](https://wenku.csdn.net/doc/6412b5adbe7fbd1778d44019?spm=1055.2635.3001.10343)
# 1. MODSCAN32概述与基础操作
MODSCAN32是一个强大而灵活的工具,被广泛应用于工业通讯协议的测试与维护。作为一款界面友好的MODBUS协议分析工
MATPOWER潮流计算并行处理指南:加速大规模电网分析

参考资源链接:[MATPOWER潮流计算详解:参数设置与案例示范](https://wenku.csdn.net/doc/6412b4a1be7fbd1778d40417?spm=1055.2635.3001.10343)
# 1. MATPOWER潮流计算基础
MATPOWER是一个开源的电
【HyperMesh与HyperView深入应用】:模型分析流程的全方位解析

参考资源链接:[HyperMesh入门:网格划分与模型优化教程](https://wenku.csdn.net/doc/7zoc70ux11?spm=
GP22数据分析高级技巧:挖掘数据潜在价值的终极方法论

参考资源链接:[TDC-GP22:超声波热量表和水表的双通道时间数字转换器](https://wenku.csdn.net/doc/64894c46575329324920fa9a?spm=1055.2635.3001.10343)
# 1. GP22数据分析概述
随着信息技术的飞速发
【单片机USB供电稳定性提升方案】:电源管理电路优化技巧大公开
参考资源链接:[单片机使用USB接口供电电路制作](https://wenku.csdn.net/doc/6412b7abbe7fbd1778d4b20d?spm=1055.2635.3001.10343)
# 1. 单片机USB供电基础与挑战
单片机作为电子
【云存储解决方案】:FC协议在云计算中的关键作用

参考资源链接:[FC光纤通道协议详解:从物理层到应用层](https://wenku.csdn.net/doc/4b6s9gwadp?spm=1055.2635.300
飞腾 U-Boot 源码解析:从零开始构建嵌入式系统的权威指南

参考资源链接:[飞腾FT-2000/4 U-BOOT开发与使用手册](https://wenku.csdn.net/doc/3suobc0nr0
B-6系统备份与恢复:数据安全的10个关键步骤

参考资源链接:[墨韵读书会:软件学院书籍共享平台详细使用指南](https://wenku.csdn.net/doc/74royby0s6?spm=1055.2635.3001.10343)
# 1. 数据备份与恢复的重要性
在当今数字化时代,企业
【网络接口设计新手必读】:如何利用LAN8720A构建稳定连接
参考资源链接:[Microchip LAN8720A/LAN8720Ai: 低功耗10/100BASE-TX PHY芯片,全面RMII接口与HP Auto-MDIX支持](https://wenku.csdn.net/doc/6470614a543f844488e461ec?spm=1055.2635.3001.10343)
# 1. 网络接口设计概述
在当今
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )