激发创新思维:OpenCV相机标定行业应用案例解析
发布时间: 2024-08-06 02:35:00 阅读量: 39 订阅数: 21 
# 1. OpenCV相机标定概述**
OpenCV相机标定是一种计算机视觉技术,用于确定相机的内在和外在参数,从而纠正图像中的失真和畸变。通过相机标定,我们可以获得相机的焦距、光学中心、透视畸变系数等重要参数,为后续的图像处理、三维重建和增强现实等应用奠定基础。
相机标定过程通常涉及以下步骤:设计和制作标定板、采集标定图像、使用OpenCV算法进行标定计算。OpenCV提供了多种标定算法,如Zhang标定法和Bouguet标定法,这些算法利用标定板上的特征点和相机成像模型来估计相机参数。
# 2.1 相机成像模型
### 2.1.1 针孔相机模型
针孔相机模型是相机成像最基本的模型,它假设光线通过一个小的孔径(针孔)投射到图像平面上,形成图像。在这个模型中,相机坐标系和图像坐标系之间存在着严格的几何关系。
**相机坐标系**:以相机光心为原点,光轴为z轴,图像平面为xy平面建立的右手坐标系。
**图像坐标系**:以图像左上角为原点,水平方向为x轴,垂直方向为y轴建立的右手坐标系。
针孔相机模型中的光线投射过程可以用透视投影变换来描述。
### 2.1.2 透视投影变换
透视投影变换将三维空间中的点投影到二维图像平面上。其数学表达式为:
```python
[x, y, 1] = [K][R | t][X, Y, Z, 1]
```
其中:
* [x, y, 1]:图像坐标系中的点坐标
* [K]:相机内参矩阵
* [R | t]:相机外参矩阵
* [X, Y, Z, 1]:相机坐标系中的点坐标
**相机内参矩阵 [K]**:描述相机内部参数,包括焦距、主点坐标和畸变系数。
**相机外参矩阵 [R | t]**:描述相机相对于世界坐标系的位姿,包括旋转矩阵 [R] 和平移向量 [t]。
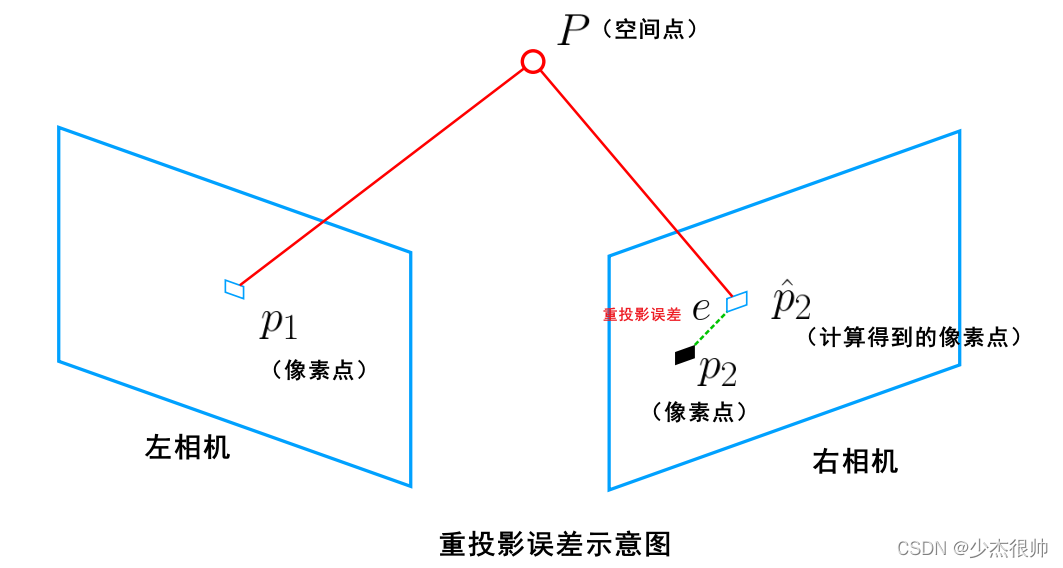
透视投影变换可以将三维空间中的点投影到二维图像平面上,反之亦然。在相机标定过程中,通过已知的三维点和对应的二维图像点,可以求解出相机内参和外参矩阵。
# 3.1 标定板设计与制作
标定板是相机标定中至关重要的工具,其设计与制作直接影响标定的精度和效率。
**设计原则:**
* **高对比度:**标定板应具有高对比度的图案,以确保特征

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
欢迎来到 OpenCV 相机标定专栏,这是一个全面的指南,涵盖了相机标定的各个方面。从基础概念到高级技术,您将深入了解相机标定的数学奥秘、误差优化指南和在机器人、无人驾驶、工业检测、虚拟现实和医学成像等领域的广泛应用。本专栏还提供了常见问题解决方案、噪声分析、畸变校正技术详解、进阶指南、实战经验分享、行业应用案例解析、优缺点分析和在文物保护、生物识别、精准农业、环境监测和建筑工程等领域的创新应用。无论您是初学者还是经验丰富的专业人士,本专栏都将为您提供宝贵的见解,帮助您掌握相机标定并将其应用于您的项目中。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
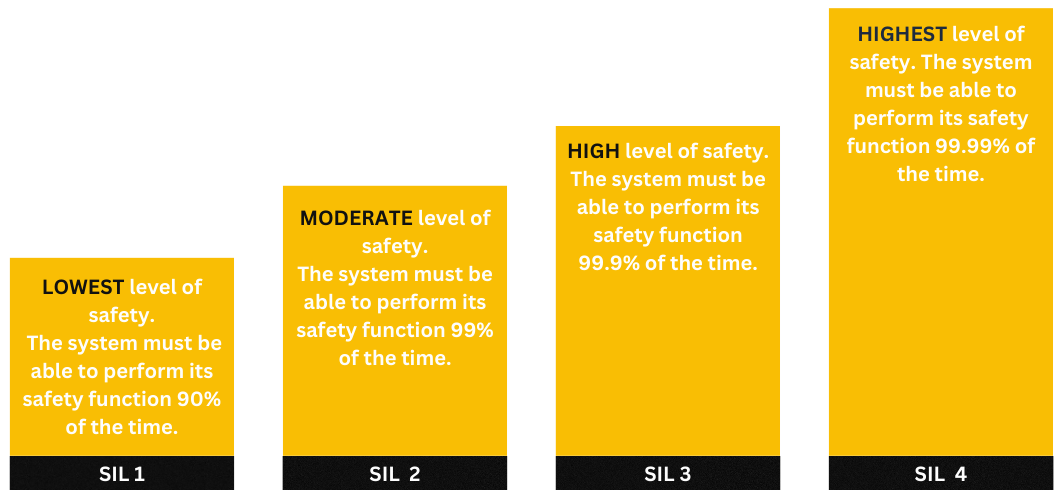
功能安全完整性级别(SIL):从理解到精通应用
# 摘要
功能安全完整性级别(SIL)是衡量系统功能安全性能的关键指标,对于提高系统可靠性、降低风险具有至关重要的作用。本文系统介绍了SIL的基础知识、理论框架及其在不同领域的应用案例,分析了SIL的系统化管理和认证流程,并探讨了技术创新与SIL认证的关系。文章还展望了SIL的创新应用和未来发展趋势,强调了在可持续发展和安全文化推广中SIL的重要性。通过对SIL深入的探讨和分析,本文旨在为相关行业提供参考,促进功
ZTW622在复杂系统中的应用案例与整合策略

# 摘要
ZTW622技术作为一种先进的解决方案,在现代复杂系统中扮演着重要角色。本文全面概述了ZTW622技术及其在ERP、CRM系统以及物联网领域的应用案例,强调了技术整合过程中的挑战和实际操作指南。文章深入探讨了ZTW622的整合策略,包括数据同步、系统安全、性能优化及可扩展性,并提供了实践操作指南。此外,本文还分享了成功案例,分析了整合过程中的挑战和解决方案,最后对ZT
【Python并发编程完全指南】:精通线程与进程的区别及高效应用
# 摘要
本文详细探讨了Python中的并发编程模型,包括线程和进程的基础知识、高级特性和性能优化。文章首先介绍了并发编程的基础概念和Python并发模型,然后深入讲解了线程编程的各个方面,如线程的创建、同步机制、局部存储、线程池的应用以及线程安全和性能调优。之后,转向进程编程,涵盖了进程的基本使用、进程间通信、多进程架构设计和性能监控。此外,还介绍了Python并发框架,如concurrent.futures、as
RS232_RS422_RS485总线规格及应用解析:基础知识介绍

# 摘要
本文详细探讨了RS232、RS422和RS485三种常见的串行通信总线技术,分析了各自的技术规格、应用场景以及优缺点。通过对RS232的电气特性、连接方式和局限性,RS422的信号传输能力与差分特性,以及RS485的多点通信和网络拓扑的详细解析,本文揭示了各总线技术在工业自动化、楼宇自动化和智能设备中的实际应用案例。最后,文章对三种总线技术进行了比较分析,并探讨了总线技术在5G通信和智能技术中的创新
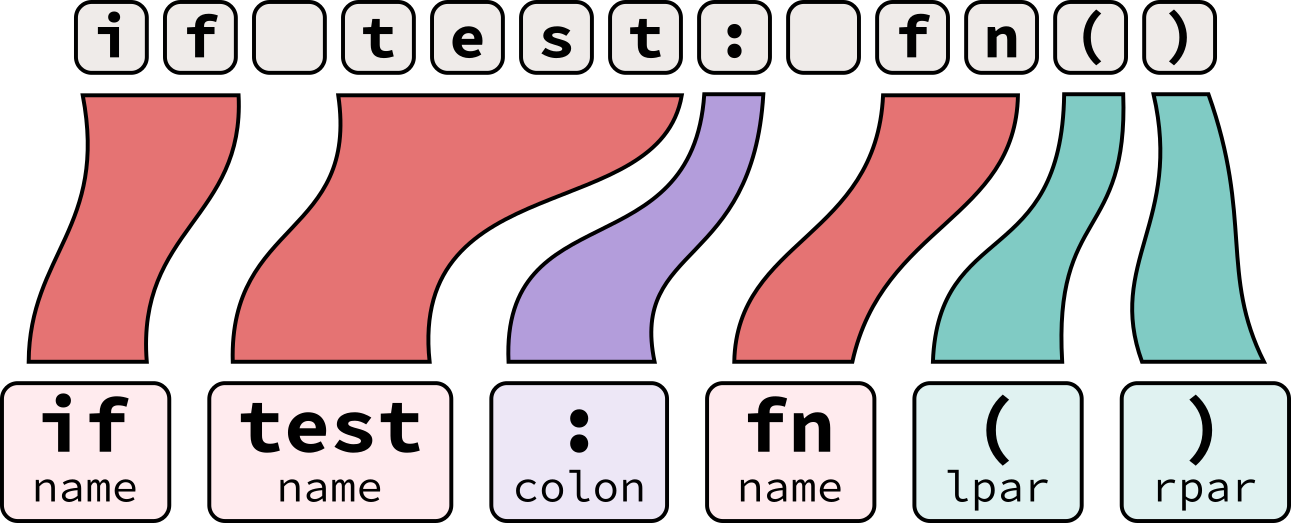
【C-Minus词法分析器构建秘籍】:5步实现前端工程
# 摘要
C-Minus词法分析器是编译器前端的关键组成部分,它将源代码文本转换成一系列的词法单元,为后续的语法分析奠定基础。本文从理论到实践,详细阐述了C-Minus词法分析器的概念、作用和工作原理,并对构建过程中的技术细节和挑战进行了深入探讨。我们分析了C-Minus语言的词法规则、利用正则表达式进行词法分析,并提供了实现C-Minus词法分析
【IBM X3850 X5故障排查宝典】:快速诊断与解决,保障系统稳定运行
# 摘要
本文全面介绍了IBM X3850 X5服务器的硬件构成、故障排查理论、硬件故障诊断技巧、软件与系统级故障排查、故障修复实战案例分析以及系统稳定性保障与维护策略。通过对关键硬件组件和性能指标的了解,阐述了服务器故障排查的理论框架和监控预防方法。此外,文章还提供了硬件故障诊断的具体技巧,包括电源、存储系统、内存和处理器问题处理方法,并对操作系统故障、网络通信故障以及应用层面问题进行了系统性的分析和故障追踪。通过实战案例的复盘,本文总结了故障排查的有效方法,并强调了系统优化、定期维护、持续监控以及故障预防的重要性,为确保企业级服务器的稳定运行提供了详细的技术指导和实用策略。
# 关键字
【TM1668芯片编程艺术】:从新手到高手的进阶之路
# 摘要
本文全面介绍了TM1668芯片的基础知识、编程理论、实践技巧、高级应用案例和编程进阶知识。首先概述了TM1668芯片的应用领域,随后深入探讨了其硬件接口、功能特性以及基础编程指令集。第二章详细论述了编程语言和开发环境的选择,为读者提供了实用的入门和进阶编程实践技巧。第三章通过多个应用项目,展示了如何将TM1668芯片应用于工业控制、智能家居和教育培训等领域。最后一章分析了芯片的高级编程技巧,讨论了性能扩展及未来的技术创新方向,同时指出编程资源与社区支持的重要性。
# 关键字
TM1668芯片;编程理论;实践技巧;应用案例;性能优化;社区支持
参考资源链接:[TM1668:全能LE
【Minitab案例研究】:解决实际数据集问题的专家策略
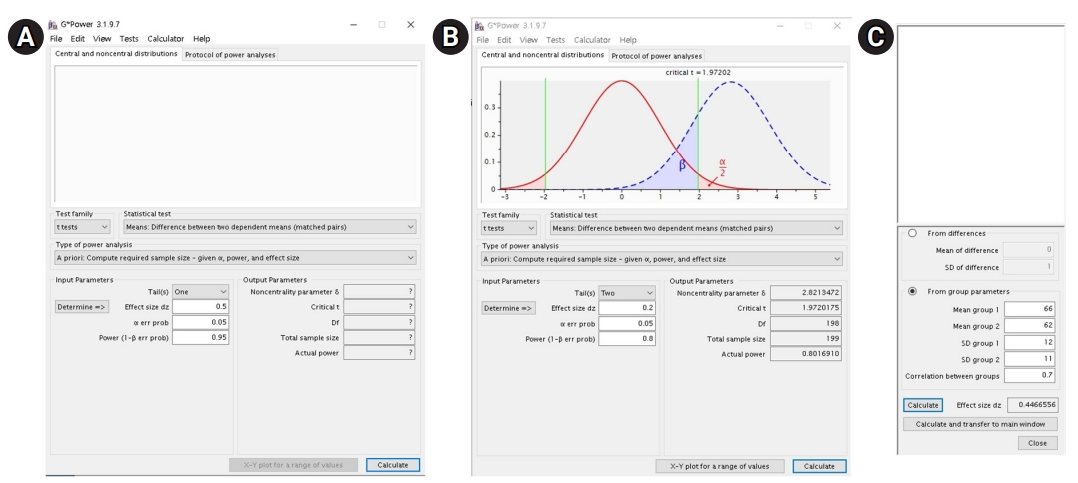
# 摘要
本文全面介绍了Minitab统计软件在数据分析中的应用,包括数据集基础、数据预处理、统计分析方法、高级数据分析技术、实验设计与优化策略,以及数据可视化工具的深入应用。文章首先概述了Minitab的基本功能和数据集的基础知识,接着详细阐述了数据清洗技巧、探索性数据分析、常用统计分析方法以及在Minitab中的具体实现。在高级数据分析技术部分,探讨了多元回归分析和时间序列分析,以及实际案例应用研究。此外,文章还涉及
跨平台开发新境界:MinGW-64与Unix工具的融合秘笈
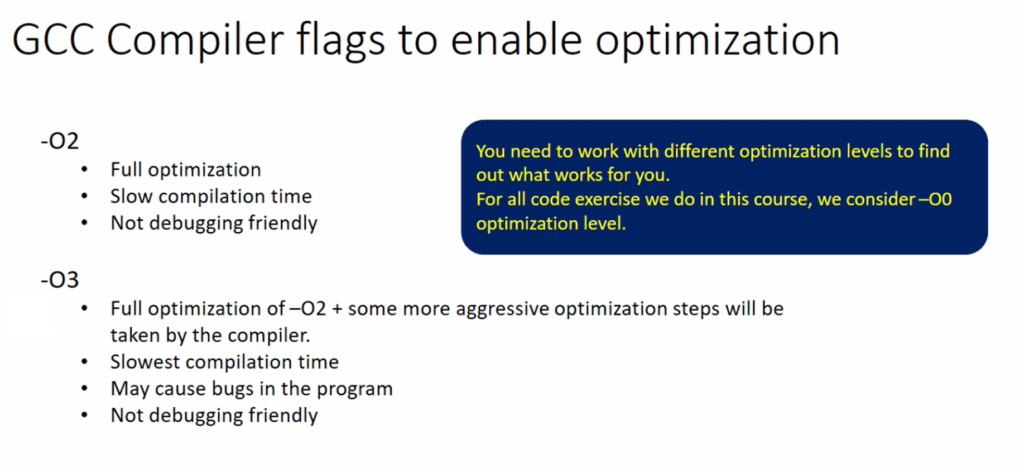
# 摘要
本文全面探讨了MinGW-64与Unix工具的融合,以及如何利用这一技术进行高效的跨平台开发。文章首先概述了MinGW-64的基础知识和跨平台开发的概念,接着深入介绍了Unix工具在MinGW-64环境下的实践应用,包括移植常用Unix工具、编写跨平台脚本和进行跨平台编译与构建。文章还讨论了高级跨平台工具链配置、性能优化策略以及跨平台问题的诊断与解决方法。通过案例研究,
【单片机编程宝典】:手势识别代码优化的艺术
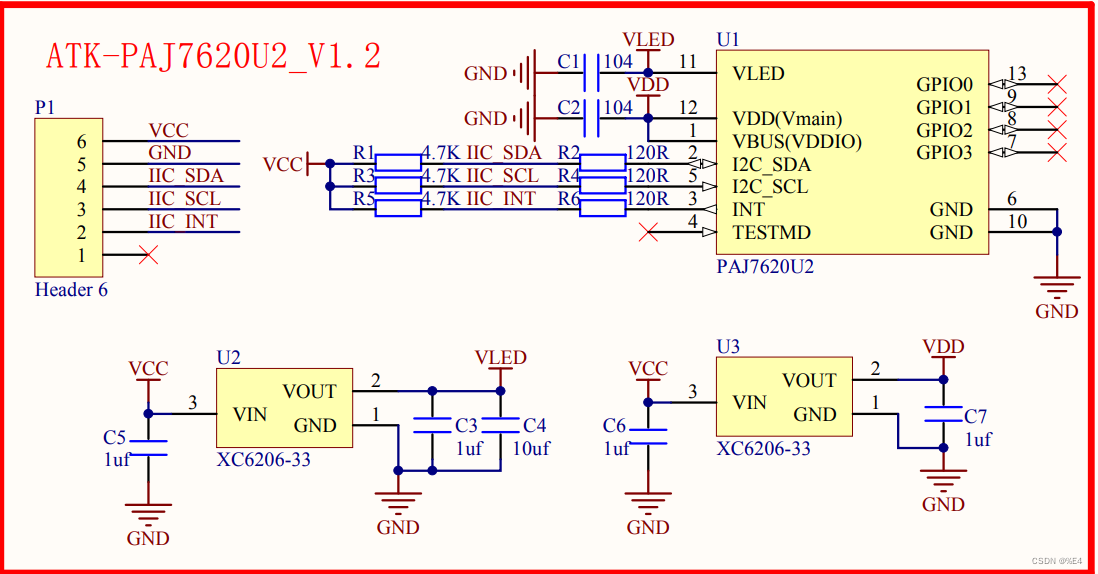
# 摘要
本文首先概述了手势识别技术的基本概念和应用,接着深入探讨了在单片机平台上的环境搭建和关键算法的实现。文中详细介绍了单片机的选择、开发环境的配置、硬件接口标准、手势信号的采集预处理、特征提取、模式识别技术以及实时性能优化策略。此外,本文还包含了手势识别系统的实践应用案例分析,并对成功案例进行了回顾和问题解决方案的讨论。最后,文章展望了未来手势识别技术的发展趋势,特别是机器学习的应用、多传感器数据融合技术以及新兴技术的
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )