提升安全性:OpenCV相机标定在生物识别中的应用
发布时间: 2024-08-06 02:51:07 阅读量: 22 订阅数: 22 

springboot187社区养老服务平台的设计与实现.zip
# 1. 生物识别概述
生物识别技术利用个人独特的生理或行为特征进行身份验证或识别。它基于这样一个前提:每个人的特征都是独一无二的,并且在一生中保持不变。生物识别技术在安全、方便和准确性方面具有优势,使其成为各种应用中的宝贵工具。
生物识别系统通常包括两个阶段:特征提取和特征匹配。在特征提取阶段,从个体的生物特征中提取出独特的特征。在特征匹配阶段,提取的特征与存储在数据库中的特征进行比较,以验证或识别个体的身份。
# 2. OpenCV相机标定
### 2.1 相机标定原理
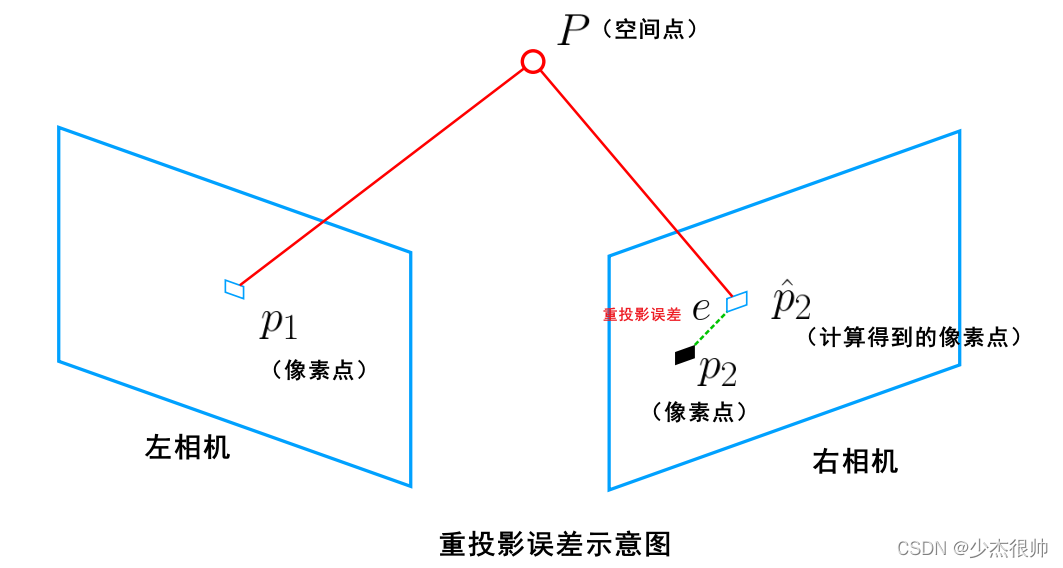
相机标定是确定相机内参和外参的过程。内参描述相机的固有特性,如焦距、主点和畸变系数。外参描述相机在世界坐标系中的位置和方向,如平移向量和旋转矩阵。
相机标定原理基于针孔相机模型。该模型假设光线从三维场景中的点穿过一个点(称为光心),并在图像平面上形成一个点。相机内参描述光心到图像平面的距离(焦距)、图像平面的中心点(主点)以及镜头畸变的程度。
### 2.2 OpenCV相机标定工具箱
OpenCV提供了一个强大的相机标定工具箱,用于执行各种相机标定任务。该工具箱包含以下主要功能:
- **棋盘格检测:**检测图像中的棋盘格图案,用于估计相机内参。
- **相机内参估计:**使用棋盘格检测结果估计相机的焦距、主点和畸变系数。
- **外参估计:**使用已知世界坐标系的点和图像中的对应点估计相机的平移向量和旋转矩阵。
### 2.3 相机标定流程
OpenCV相机标定的典型流程如下:
1. **采集图像:**采集一系列包含棋盘格图案的图像,从不同角度和距离拍摄。
2. **检测棋盘格:**使用OpenCV的棋盘格检测算法检测图像中的棋盘格。
3. **估计内参:**使用检测到的棋盘格估计相机的焦距、主点和畸变系数。
4. **估计外参:**使用已知世界坐标系的点和图像中的对应点估计相机的平移向量和旋转矩阵。
```python
import cv2
import numpy as np
# 采集图像
images = [cv2.imread(f'image{i}.jpg') for i in range(10)]
# 检测棋盘格
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)
objp = np.zeros((9*6, 3), np.float32)
objp[:, :2] = np.mgrid[0:9, 0:6].T.reshape(-1, 2)
objpoints = [] # 存储世界坐标系中的棋盘格
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
欢迎来到 OpenCV 相机标定专栏,这是一个全面的指南,涵盖了相机标定的各个方面。从基础概念到高级技术,您将深入了解相机标定的数学奥秘、误差优化指南和在机器人、无人驾驶、工业检测、虚拟现实和医学成像等领域的广泛应用。本专栏还提供了常见问题解决方案、噪声分析、畸变校正技术详解、进阶指南、实战经验分享、行业应用案例解析、优缺点分析和在文物保护、生物识别、精准农业、环境监测和建筑工程等领域的创新应用。无论您是初学者还是经验丰富的专业人士,本专栏都将为您提供宝贵的见解,帮助您掌握相机标定并将其应用于您的项目中。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【ILI9806G技术规格全解析】:性能指标与应用场景的终极研究

# 摘要
本文全面介绍ILI9806G的技术规格、性能指标以及应用场景,旨在为设计者和开发者提供深入的理解和集成指导。文章首先概览了ILI9806G的技术规格,然后详细分析了其性能指标,包括显示分辨率、色彩深度、亮度、对比度、视角特性、响应时间以及刷新率。接下来,本文探讨了ILI9806G在工业控制、智能家居以及车载信息系统中的具体应用场景。此外,文章还提供了硬件接口
高效处理高精度地图:ADASIS v3.1.0 数据流管理实战指南

# 摘要
本文全面介绍了ADASIS v3.1.0数据流的理论基础、架构设计、实践应用及未来发展趋势。首先概述了ADASIS v3.1.0数据流的基本概念,并详细解析了其理论基础,包括高精度地图技术背景及其在ADAS中的作用,以及ADA
【深入剖析金田变频器】:揭秘其工作原理与技术规格

# 摘要
金田变频器作为一种先进的电力控制设备,被广泛应用于工业生产和特殊环境。本文首先概述了金田变频器的基本概念、分类和应用。随后,详细解读了其工作原理,核心组成以及能量转换过程。本研究深入分析了金田变频器的技术规格,包括参数性能指标、控制与通信接口、环境适应性与兼容性,并对具体应用案例进行了探讨。此外,本文还提供了金田变频器的维护与故障排除方法,并对未来技术趋势进行了预测。最后,文章综合评述了金田变频器的市场定位、技术创新方向及企业战略规划,旨在为相关领域
【安捷伦4395A使用秘籍】:轻松掌握的10大简易操作技巧!
# 摘要
安捷伦4395A是一种广泛应用于电子测试领域的综合网络/频谱/阻抗分析仪,它在电子设计、生产调试和质量控制中发挥重要作用。本文首先介绍了4395A的基础知识和基本测量操作技巧,包括设备的连接、设置、频率响应测试、阻抗测量和数据处理。然后,文章转向介绍4395A的高级功能应用,例如频谱分析、网络分析和时间域测量。此外,还探讨了如何通过优化设置提高测量精度以及解决测量中遇到的常见问题。最后,本文通过实际案例分析,分享了高频电路、功率放大器和滤波器设计与验证的测试经验和技巧,旨在帮助工程师们更有效地使用4395A。
# 关键字
安捷伦4395A;测量操作;频率响应;阻抗测量;频谱分析;网
自抗扰控制原理:从理论到实践的终极指南

# 摘要
自抗扰控制是一种先进的控制策略,其能够处理系统中的不确定性和外部扰动,保证系统的稳定性和性能。本文首先概述了自抗扰控制的基本原理,并详细探讨了其理论基础,包括数学模型、关键算法和性能评价指标。接着,本文介绍了自抗扰控制实验平台的搭建,包括硬件选择、软件配置及实验结果的收集与分析。随后
【安装前必读】:ArcGIS 10.3 系统要求及优化指南
# 摘要
随着地理信息系统(GIS)技术的发展,对系统性能的要求越来越高,而ArcGIS 10.3作为该领域的主流软件,对系统的软硬件配置有着明确的要求。本文详细介绍了ArcGIS 10.3的系统要求,包括硬件配置、图形性能、软件环境配置,以及安装流程和高级定制化优化。文章着重分析了硬件要求、操作系统兼容性、软件依赖以及安装后的常见问题解决,为用户提供了从安装到维护的一系列优化建议。同时,通过对特定场景下的高级配置与性能调优的案例研究,为用户在大数据环境和分布式计算架构中实现高效GIS应用提供了参考。
# 关键字
ArcGIS 10.3;系统要求;硬件配置;软件环境;性能优化;安装流程
参
跨平台测试秘籍:解决VectorCAST兼容性问题,实现无阻碍测试流程

# 摘要
跨平台测试在确保软件产品能够在多种环境中正常运行方面发挥着关键作用。本文首先介绍跨平台测试与VectorCAST工具的基本概念。随后,深入探讨VectorCAST在不同操作系统、硬件架构以及跨语言环境下的兼容性问题,分析了影响兼容性的关键因素并
【代码实现优化】:数据结构实战篇,考研1800题的代码精进(性能优化)
# 摘要
数据结构优化对于提升软件性能至关重要,尤其是在处理大数据和复杂算法时。本文首先强调了数据结构优化的重要性,并对比了基本数据结构如数组、链表、栈、队列和树结构的性能,并提出了相应的优化策略。接着,本文深入探讨了复杂数据结构和算法的性能优化,例如哈希表、散列表、图算法、动态规划和贪心算法的优化技巧。最后,通过实战案例分析,本文展示了如何在具体的编程实践中选择合适的数据结构,并通过优化算法提升效率,总结了编码实践中常用的性能优化方法,并对优化效果进行了评估与验证。本文旨在为软件开发者提供系统性的数据结构优化指南,并推动更高效的算法设计和实现。
# 关键字
数据结构优化;性能分析;哈希表;
【行业内幕揭秘:数据库性能下降的真相】:20年技术沉淀的分析与策略

# 摘要
数据库性能问题普遍存在于信息管理系统中,影响数据处理速度和准确性。本文首先概述了数据库性能下降的常见问题,随后深入探讨了性能优化的理论基础,包括性能评估指标、索引和查询优化以及数据库架构。紧接着,文章介绍了性能诊断与分析工具的应用,包括监控和SQL分析工具,并详述了性能优化实践策略。最后,本文分析了灾难恢复与高可用性设计,并探讨了数据库技术的未来趋势,
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )