为图像分析奠定坚实基础:OpenCV图像处理中的数据预处理
发布时间: 2024-08-12 19:56:26 阅读量: 21 订阅数: 31 

OpenCV图像处理入门
# 1. 图像预处理概述**
图像预处理是图像分析中至关重要的一步,为后续的图像增强、降噪、分割和特征提取奠定坚实的基础。其目的是通过一系列操作改善图像质量,增强图像中感兴趣的特征,同时抑制噪声和干扰。
图像预处理技术包括:
* **图像增强:**调整图像的对比度、亮度和颜色,使其更适合分析。
* **图像降噪:**去除图像中的噪声,提高图像清晰度。
* **图像分割:**将图像分割成不同的区域或对象,便于进一步分析。
# 2. 图像增强
图像增强是图像处理中至关重要的一步,旨在改善图像的视觉效果和信息可读性。通过增强图像的对比度、亮度和锐度,我们可以提高后续图像处理任务(如特征提取和目标检测)的准确性和效率。
### 2.1 灰度转换
灰度转换是将彩色图像转换为灰度图像的过程,它保留了图像的亮度信息,同时去除了色彩信息。灰度图像通常用于后续的图像处理任务,如边缘检测和纹理分析。
**2.1.1 灰度化方法**
有几种灰度化方法,每种方法都有其独特的优势和劣势。最常见的灰度化方法包括:
* **平均值法:**将图像中每个像素的三个颜色通道(红色、绿色和蓝色)的平均值作为灰度值。
* **加权平均值法:**使用不同的权重对三个颜色通道进行加权平均,以获得灰度值。
* **最大值法:**将图像中每个像素的三个颜色通道中的最大值作为灰度值。
* **最小值法:**将图像中每个像素的三个颜色通道中的最小值作为灰度值。
**2.1.2 灰度化效果比较**
不同的灰度化方法会产生不同的灰度图像效果。平均值法通常会产生平滑的灰度图像,而最大值法和最小值法会产生更具对比度的灰度图像。加权平均值法允许用户自定义权重,以获得特定的灰度化效果。
### 2.2 直方图均衡化
直方图均衡化是一种图像增强技术,用于改善图像的对比度和亮度。它通过调整图像的直方图(像素值分布)来实现。
**2.2.1 直方图均衡化的原理**
直方图均衡化的原理是将图像的直方图拉伸到整个灰度范围。这将提高图像中像素值的对比度,并增强图像的整体亮度。
**2.2.2 直方图均衡化的实现**
直方图均衡化可以通过以下步骤实现:
1. 计算图像的直方图,即每个灰度值出现的次数。
2. 累加直方图,得到每个灰度值的累积分布函数(CDF)。
3. 将每个像素的灰度值映射到新的灰度值,该新灰度值由CDF确定。
```python
import cv2
import matplotlib.pyplot as plt
# 读取图像
image = cv2.imread('image.jpg')
# 灰度转换
gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 计算直方图
hist = cv2.calcHist([gray_image], [0], None, [256], [0, 256])
# 累加直方图
cdf = hist.cumsum()
# 归一化累积分布函数
cdf_normalized = cdf / cdf[-1]
# 直方图均衡化
equalized_image = cv2.equalizeHist(gray_image)
# 显示结果
plt.subplot(121), plt.imshow(gray_image, cmap='gray')
plt.title('Original Image'), plt.xticks([]), plt.yticks([])
plt.subplot(122), plt.imshow(equalized_image, cmap='gray')
plt.title('Equalized Image'), plt.xticks([]), plt.yticks([])
plt.show()
```
**逻辑分析:**
* `cv2.calcHist()`函数计算图像的直方图。
* `cv2.cumsum()`函数累加直方图,得到CDF。
* `cdf / cdf[-1]`将CDF归一化到[0, 1]的范围内。
* `cv2.equalizeHist()`函数应用直方图均衡化。
# 3.1 空间滤波
空间滤波是一种图像降噪技术,它通过将图像中的每个像素与其邻域像素进行加权平均来平滑图像。空间滤波器通常使用一个卷积核,它是一个小的矩阵,用于对图像进行卷积操作。
#### 3.1.1 平均滤波
平均滤波是一种最简单的空间滤波器,它将图像中每个像素的值替换为其邻域像素值的平均值。平均滤波器可以有效地去除图像中的高频噪声,但它也会使图像变得模糊。
```python
import cv2
import numpy as np
# 读取图像
image = cv2.imread('image.jpg')
# 创建平均滤波器
kernel = np.array([[1, 1, 1],
[1, 1, 1],
[1, 1, 1]]) / 9
# 应用平均滤波
filtered_image = cv2.filter2D(image, -1, kernel)
# 显示结果
cv2.imshow('Original Image', image)
cv2.imshow('Filtered Image', filtered_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
**代码逻辑分析:**
* `cv2.filter2D()` 函数用于对图像应用卷积操作。
* `-1` 参数表示使用图像的默认深度。
* `kernel` 参数是卷积核,它是一个 3x3 的平均滤波器。
* `filtered_image` 变量存储着滤波后的图像。
#### 3.1.2 高斯滤波
高斯滤波是一种改进的平均滤波器,它使用一个高斯分布作为卷积核。高斯分布是一个钟形曲线,它在中心处具有最大值,并向两侧逐渐衰减。这使得高斯滤波器能够更有效地去除噪声,同时保留图像的边缘和细节。
```python
import cv2
import numpy as np
# 读取图像
image = cv2.imread('image.jpg')
# 创建高斯滤波器
kernel = cv2.getGaussianKernel(5, 1)
kernel = np.outer(kernel, kernel.transpose())
# 应用高斯滤波
filtered_image = cv2.filter2D(image, -1, kernel)
# 显示结果
cv2.imshow('Original Image', image)
cv2.imshow('Filtered Image', filtered_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
**代码逻辑分析:**
* `cv2.getGaussianKernel()` 函数用于创建高斯分布卷积核。
* `kernel` 参数是卷积核,它是一个 5x5 的高斯滤波器。
* `filtered_image` 变量存储着滤波后的图像。
#### 3.1.3 中值滤波
中值滤波是一种非线性滤波器,它将图像中每个像素的

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
专栏"OpenCV图像处理"深入探讨了计算机视觉和图像处理的方方面面。从基础知识到高级技术,专栏涵盖了图像分割、识别、色块识别与定位、图像增强、特征提取、图像分类、图像配准、图像处理性能优化、常见问题解决等主题。通过实战指南和应用场景探索,专栏展示了OpenCV在工业、医疗、安防等领域的广泛应用。此外,专栏还揭秘了人工智能背后的图像处理技术,为图像分析和计算机视觉提供了坚实的基础。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【软件管理系统设计全攻略】:从入门到架构的终极指南
# 摘要
随着信息技术的飞速发展,软件管理系统成为支持企业运营和业务创新的关键工具。本文从概念解析开始,系统性地阐述了软件管理系统的需求分析、设计、数据设计、开发与测试、部署与维护,以及未来的发展趋势。重点介绍了系统需求分析的方法论、系统设计的原则与架构选择、数据设计的基础与高级技术、以及质量保证与性能优化。文章最后
【硬盘修复的艺术】:西数硬盘检测修复工具的权威指南(全面解析WD-L_WD-ROYL板支持特性)
# 摘要
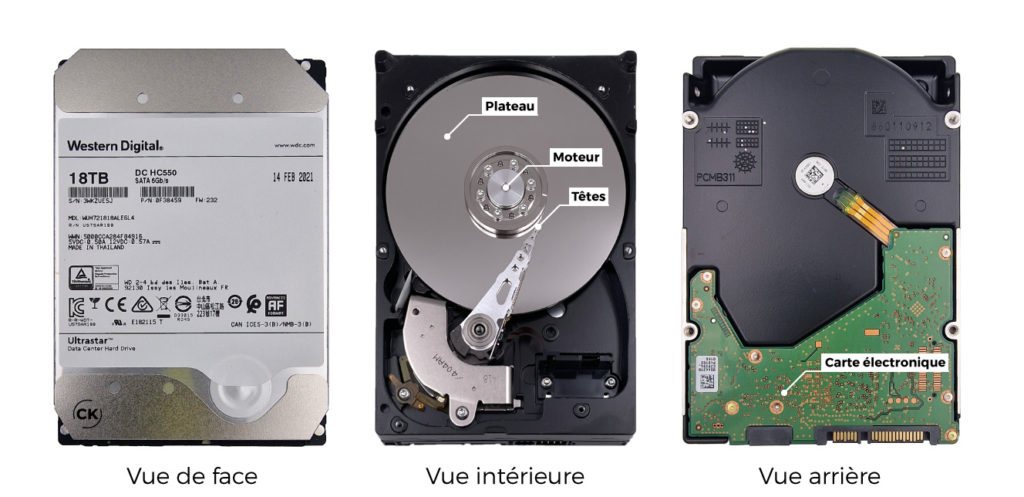
本文深入探讨了硬盘修复的基础知识,并专注于西部数据(西数)硬盘的检测修复工具。首先介绍了西数硬盘的内部结构与工作原理,随后阐述了硬盘故障的类型及其原因,包括硬件与软件方面的故障。接着,本文详细说明了西数硬盘检测修复工具的检测和修复理论基础,以及如何实践安装、配置和
【sCMOS相机驱动电路信号完整性秘籍】:数据准确性与稳定性并重的分析技巧

# 摘要
本文针对sCMOS相机驱动电路信号完整性进行了系统的研究。首先介绍了信号完整性理论基础和关键参数,紧接着探讨了信号传输理论,包括传输线理论基础和高频信号传输问题,以及信号反射、串扰和衰减的理论分析。本文还着重分析了电路板布局对信号完整性的影响,提出布局优化策略以及高速数字电路的布局技巧。在实践应用部分,本文提供了信号完整性测试工具的选择,仿真软件的应用,
能源转换效率提升指南:DEH调节系统优化关键步骤
# 摘要
能源转换效率对于现代电力系统至关重要,而数字电液(DEH)调节系统作为提高能源转换效率的关键技术,得到了广泛关注和研究。本文首先概述了DEH系统的重要性及其基本构成,然后深入探讨了其理论基础,包括能量转换原理和主要组件功能。在实践方法章节,本文着重分析了DEH系统的性能评估、参数优化调整,以及维护与故障排除策略。此外,本文还介绍了DEH调节系统的高级优化技术,如先进控制策略应用、系统集成与自适应技术,并讨论了节能减排的实现方法。最后,本文展望了DEH系统优化的未来趋势,包括技术创新、与可再生能源的融合以及行业标准化与规范化发展。通过对DEH系统的全面分析和优化技术的研究,本文旨在为提
【AT32F435_AT32F437时钟系统管理】:精确控制与省电模式

# 摘要
本文系统性地探讨了AT32F435/AT32F437微控制器中的时钟系统,包括其基本架构、配置选项、启动与同步机制,以及省电模式与能效管理。通过对时钟系统的深入分析,本文强调了在不同应用场景中实现精确时钟控制与测量的重要性,并探讨了高级时钟管理功能。同时,针对时钟系统的故障预防、安全机制和与外围设备的协同工作进行了讨论。最后,文章展望了时
【MATLAB自动化脚本提升】:如何利用数组方向性优化任务效率
# 摘要
本文深入探讨MATLAB自动化脚本的构建与优化技术,阐述了MATLAB数组操作的基本概念、方向性应用以及提高脚本效率的实践案例。文章首先介绍了MATLAB自动化脚本的基础知识及其优势,然后详细讨论了数组操作的核心概念,包括数组的创建、维度理解、索引和方向性,以及方向性在数据处理中的重要性。在实际应用部分,文章通过案例分析展示了数组方向性如何提升脚本效率,并分享了自动化
现代加密算法安全挑战应对指南:侧信道攻击防御策略
# 摘要
侧信道攻击利用信息泄露的非预期通道获取敏感数据,对信息安全构成了重大威胁。本文全面介绍了侧信道攻击的理论基础、分类、原理以及实际案例,同时探讨了防御措施、检测技术以及安全策略的部署。文章进一步分析了侧信道攻击的检测与响应,并通过案例研究深入分析了硬件和软件攻击手段。最后,本文展望了未来防御技术的发展趋势,包括新兴技术的应用、政策法规的作用以及行业最佳实践和持续教育的重要性。
# 关键字
侧信道攻击;信息安全;防御措施;安全策略;检测技术;防御发展趋势
参考资源链接:[密码编码学与网络安全基础:对称密码、分组与流密码解析](https://wenku.csdn.net/doc/64
【科大讯飞语音识别技术完全指南】:5大策略提升准确性与性能
# 摘要
本论文综述了语音识别技术的基础知识和面临的挑战,并着重分析了科大讯飞在该领域的技术实践。首先介绍了语音识别技术的原理,包括语音信号处理基础、自然语言处理和机器学习的应用。随
【现场演练】:西门子SINUMERIK测量循环在多样化加工场景中的实战技巧
# 摘要
本文旨在全面介绍西门子SINUMERIK测量循环的理论基础、实际应用以及优化策略。首先概述测量循环在现代加工中心的重要作用,继而深入探讨其理论原理,包括工件测量的重要性、测量循环参数设定及其对工件尺寸的影响。文章还详细分析了测量循环在多样化加工场景中的应用,特别是在金属加工和复杂形状零件制造中的挑战,并提出相应的定制方案和数据处理方法。针对多轴机床的测量循环适配,探讨了测量策略和同步性问题。此外,本文还探讨了测量循环的优化方法、提升精确度的技巧,以及西门子SINUMERIK如何融合新兴测量技术。最后,本文通过综合案例分析与现场演练,强调了理论与实践的结合,并对未来智能化测量技术的发展
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )