解锁数据价值:OpenCV图像特征提取,从图像中提取关键信息
发布时间: 2024-08-12 19:23:56 阅读量: 25 订阅数: 35 

# 1. 图像特征提取概述
图像特征提取是计算机视觉领域的关键技术,用于从图像中提取具有代表性的信息,以便进行后续分析和处理。图像特征可以分为局部特征和全局特征,分别描述图像局部区域和整体属性。OpenCV(Open Source Computer Vision Library)是一个流行的计算机视觉库,提供了丰富的图像特征提取算法,包括 SIFT、SURF 和 ORB。
# 2. OpenCV图像特征提取理论
### 2.1 图像特征的概念和类型
#### 2.1.1 局部特征和全局特征
图像特征可以分为局部特征和全局特征。局部特征是指图像中特定区域的特征,如边缘、角点、纹理等。全局特征则描述整个图像的整体属性,如颜色直方图、纹理能量等。
#### 2.1.2 颜色特征、纹理特征和形状特征
图像特征还可以根据其属性进行分类,主要包括颜色特征、纹理特征和形状特征。
* **颜色特征**:描述图像中像素的颜色分布,常用颜色直方图、颜色共生矩阵等表示。
* **纹理特征**:描述图像中像素的纹理模式,常用局部二值模式(LBP)、灰度共生矩阵(GLCM)等表示。
* **形状特征**:描述图像中物体的形状和轮廓,常用边界框、轮廓长度、形状指数等表示。
### 2.2 OpenCV中常见的特征提取算法
OpenCV提供了丰富的图像特征提取算法,其中最常用的包括:
#### 2.2.1 SIFT算法
尺度不变特征变换(SIFT)是一种局部特征提取算法,对图像旋转、缩放和光照变化具有鲁棒性。其流程包括:
1. **图像金字塔构建**:将图像构建为不同尺度的金字塔,以检测不同尺度的特征。
2. **特征点检测**:使用差分高斯滤波器(DoG)检测图像中的极值点。
3. **特征点定位**:通过拟合抛物线函数精确定位特征点。
4. **特征描述**:使用特征点周围的梯度方向直方图描述特征点。
```python
import cv2
# 加载图像
image = cv2.imread('image.jpg')
# 构建SIFT特征提取器
sift = cv2.SIFT_create()
# 检测和描述特征点
keypoints, descriptors = sift.detectAndCompute(image, None)
# 绘制特征点
cv2.drawKeypoints(image, keypoints, image)
# 显示图像
cv2.imshow('SIFT Features', image)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
#### 2.2.2 SURF算法
加速稳健特征(SURF)是一种局部特征提取算法,在速度和鲁棒性方面优于SIFT算法。其流程与SIFT算法类似,但使用积分图像和Hessian矩阵进行特征点检测。
```python
import cv2
# 加载图像
image = cv2.imread('image.jpg')
# 构建SURF特征提取器
surf = cv2.SURF_create()
# 检测和描述特征点
keypoints, descriptors = surf.detectAndCompute(image, None)
# 绘制特征点
cv2.drawKeypoints(image, keypoints, image)
# 显示图像
cv2.imshow('SURF Features', image)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
#### 2.2.3 ORB算法
定向快速二进制鲁棒特征(ORB)是一种局部特征提取算法,具有低计算复杂度和高鲁棒性。其流程包括:
1. **特征点检测**:使用FAST算法检测图像中的角点。
2. **特征描述**:使用BRIEF算法描述特征点,生成二进制特征向量。
3. **特征匹配**:通过汉明距离进行特征匹配。
```python
import cv2
# 加载图像
image = cv2.imread('image.jpg')
# 构建ORB特征提取器
orb = cv2.ORB_create()
# 检测和描述特征点
keypoints, descriptors = orb.detectAndCompute(image, None)
# 绘制特征点
cv2.drawKeypoints(image, keypoints, image)
# 显示图像
cv2.imshow('ORB Features', image)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
# 3. OpenCV图像特征提取实践
### 3.1 图像特征提取流程
图像特征提取是一个多步骤的过程,涉及以下步骤:
#### 3.1.1 图像预处理
图像预处理是图像特征提取的第一步,它可以提高特征提取的准确性和鲁棒性。常见的预处理技术包括:
- **灰度转换:**将彩色图像转换为灰度图像,以减少颜色变化的影响。
- **噪声去除:**

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
专栏"OpenCV图像处理"深入探讨了计算机视觉和图像处理的方方面面。从基础知识到高级技术,专栏涵盖了图像分割、识别、色块识别与定位、图像增强、特征提取、图像分类、图像配准、图像处理性能优化、常见问题解决等主题。通过实战指南和应用场景探索,专栏展示了OpenCV在工业、医疗、安防等领域的广泛应用。此外,专栏还揭秘了人工智能背后的图像处理技术,为图像分析和计算机视觉提供了坚实的基础。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
Android二维码实战:代码复用与模块化设计的高效方法

# 1. Android二维码技术概述
在本章,我们将对Android平台上二维码技术进行初步探讨,概述其在移动应用开发中的重要性和应用背景。二维码技术作为信息交换和移动互联网连接的桥梁,已经在各种业务场景中得到广泛应用。
## 1.1 二维码技术的定义和作用
二维码(QR Code)是一种能够存储信息的二维条码,它能够以
MATLAB遗传算法与模拟退火策略:如何互补寻找全局最优解

# 1. 遗传算法与模拟退火策略的理论基础
遗传算法(Genetic Algorithms, GA)和模拟退火(Simulated Annealing, SA)是两种启发式搜索算法,它们在解决优化问题上具有强大的能力和独特的适用性。遗传算法通过模拟生物
故障恢复计划:机械运动的最佳实践制定与执行

# 1. 故障恢复计划概述
故障恢复计划是确保企业或组织在面临系统故障、灾难或其他意外事件时能够迅速恢复业务运作的重要组成部分。本章将介绍故障恢复计划的基本概念、目标以及其在现代IT管理中的重要性。我们将讨论如何通过合理的风险评估与管理,选择合适的恢复策略,并形成文档化的流程以达到标准化。
## 1.1 故障恢复计划的目的
故障恢复计划的主要目的是最小化突发事件对业务的
【NLP新范式】:CBAM在自然语言处理中的应用实例与前景展望

# 1. NLP与深度学习的融合
在当今的IT行业,自然语言处理(NLP)和深度学习技术的融合已经产生了巨大影响,它们共同推动了智能语音助手、自动翻译、情感分析等应用的发展。NLP指的是利用计算机技术理解和处理人类语言的方式,而深度学习作为机器学习的一个子集,通过多层神经网络模型来模拟人脑处理数据和创建模式
【JavaScript人脸识别的用户体验设计】:界面与交互的优化
# 1. JavaScript人脸识别技术概述
## 1.1 人脸识别技术简介
人脸识别技术是一种通过计算机图像处理和识别技术,让机器能够识别人类面部特征的技术。近年来,随着人工智能技术的发展和硬件计算能力的提升,JavaScript人脸识别技术得到了迅速的发展和应用。
## 1.2 JavaScript在人脸识别中的应用
JavaScript作为一种强
Python算法实现捷径:源代码中的经典算法实践

# 1. Python算法实现捷径概述
在信息技术飞速发展的今天,算法作为编程的核心之一,成为每一位软件开发者的必修课。Python以其简洁明了、可读性强的特点,被广泛应用于算法实现和教学中。本章将介绍如何利用Python的特性和丰富的库,为算法实现铺平道路,提供快速入门的捷径
PLDroidMediaStreaming源码深度解析:推流与播放核心原理全解
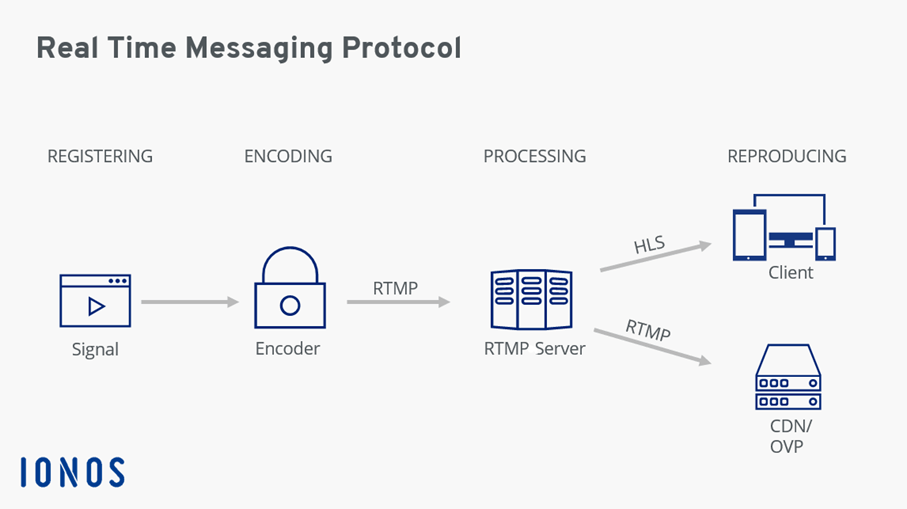
# 1. PLDroidMediaStreaming源码概述
## 1.1 PLDroidMediaStreaming简介
PLDroidMediaStreaming是一个开源的流媒体解决方案,专门用于Android平台。它支持实时音视频推流
MATLAB时域分析:动态系统建模与分析,从基础到高级的完全指南
# 1. MATLAB时域分析概述
MATLAB作为一种强大的数值计算与仿真软件,在工程和科学领域得到了广泛的应用。特别是对于时域分析,MATLAB提供的丰富工具和函数库极大地简化了动态系统的建模、分析和优化过程。在开始深入探索MATLAB在时域分析中的应用之前,本章将为读者提供一个基础概述,包括时域分析的定义、重要性以及MATLAB在其中扮演的角色。
时域
全球高可用部署:MySQL PXC集群的多数据中心策略

# 1. 高可用部署与MySQL PXC集群基础
在IT行业,特别是在数据库管理系统领域,高可用部署是确保业务连续性和数据一致性的关键。通过本章,我们将了解高可用部署的基础以及如何利用MySQL Percona XtraDB Cluster (PXC) 集群来实现这一目标。
## MySQL PXC集群的简介
MySQL PXC集群是一个可扩展的同步多主节点集群解决方案,它能够提供连续可用性和数据一致
【MATLAB雷达信号处理】:理论与实践结合的实战教程
# 1. MATLAB雷达信号处理概述
在当今的军事与民用领域中,雷达系统发挥着至关重要的作用。无论是空中交通控制、天气监测还是军事侦察,雷达信号处理技术的应用无处不在。MATLAB作为一种强大的数学软件,以其卓越的数值计算能力、简洁的编程语言和丰富的工具箱,在雷达信号处理领域占据着举足轻重的地位。
在本章中,我们将初步介绍MATLAB在雷达信号处理中的应用,并
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )