控制系统中的MATLAB逆矩阵:关键作用不容忽视
发布时间: 2024-06-04 23:57:37 阅读量: 95 订阅数: 53 

matlab逆系统控制程序
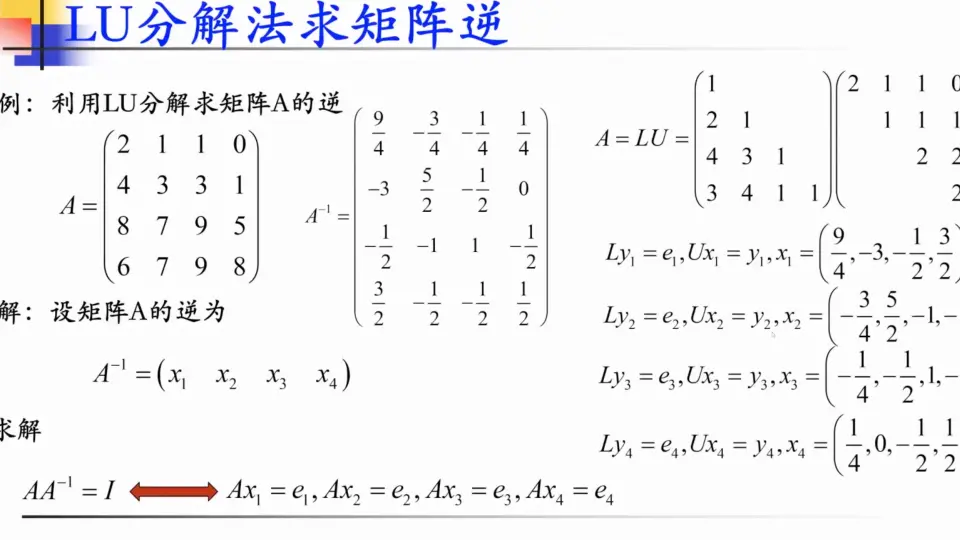
# 1. MATLAB逆矩阵概述
逆矩阵是线性代数中一个重要的概念,在控制系统中有着广泛的应用。MATLAB提供了多种计算逆矩阵的方法,包括inv()函数、pinv()函数等。
逆矩阵在控制系统中主要用于求解线性方程组。例如,在状态反馈控制中,需要计算状态反馈增益矩阵,该矩阵可以通过逆矩阵求解。在观测器设计中,需要计算观测器增益矩阵,该矩阵也可以通过逆矩阵求解。
此外,逆矩阵还可以用于控制系统性能优化和稳定性分析。通过优化逆矩阵,可以改善控制系统的性能,并提高系统的稳定性。
# 2. 逆矩阵在控制系统中的理论基础
### 2.1 线性代数中的逆矩阵概念
在控制系统中,逆矩阵是一个重要的概念,它可以用来描述系统的可逆性、可控性和可观测性。在数学上,逆矩阵是指一个方阵,当它与另一个方阵相乘时,结果为单位矩阵。
对于一个 n 阶方阵 A,其逆矩阵记为 A^-1,满足以下关系:
```
A * A^-1 = A^-1 * A = I
```
其中 I 为 n 阶单位矩阵。
如果一个方阵 A 存在逆矩阵,则称 A 为可逆矩阵。否则,A 为不可逆矩阵。
### 2.2 控制系统中逆矩阵的应用
在控制系统中,逆矩阵具有广泛的应用,包括:
* **可逆性:**一个控制系统的可逆性是指它是否可以从输出恢复输入。如果系统矩阵可逆,则系统可逆。
* **可控性:**一个控制系统的可控性是指它是否可以通过输入控制所有状态。如果系统矩阵和输入矩阵的秩等于系统阶数,则系统可控。
* **可观测性:**一个控制系统的可观测性是指它是否可以通过输出观测所有状态。如果系统矩阵和输出矩阵的秩等于系统阶数,则系统可观测。
这些性质对于分析和设计控制系统至关重要。例如,如果一个系统不可逆,则无法从输出恢复输入,这将限制系统的可控性和可观测性。
# 3. MATLAB逆矩阵的实现
### 3.1 inv()函数的基本用法
MATLAB中计算矩阵逆最常用的函数是`inv()`函数。其语法如下:
```matlab
inv(A)
```
其中,`A`为需要求逆的矩阵。
`inv()`函数的用法非常简单,直接输入需要求逆的矩阵即可。例如,求矩阵`A`的逆矩阵:
```matlab
A = [1 2; 3 4];
inv_A = inv(A);
```
计算结果为:
```
inv_A =
-2.0000 1.00
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 MATLAB 中逆矩阵的方方面面,从理论原理到实际应用。它提供了全面的指南,帮助您掌握逆矩阵计算的奥秘,解锁其在各种领域的应用潜力。专栏涵盖了逆矩阵求解的秘籍、MATLAB 中逆矩阵的深入解析、进阶指南、性能优化技巧、常见错误和解决方案,以及逆矩阵在数据分析、机器学习、图像处理和信号处理中的应用。此外,专栏还强调了数值稳定性和条件数对逆矩阵计算的影响,帮助您深入理解并解决数值问题。通过阅读本专栏,您将获得对 MATLAB 逆矩阵的全面理解,并掌握其在解决复杂问题和提升算法性能中的强大功能。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
内存管理机制剖析:合泰BS86D20A单片机深度解读与应用
# 摘要
本文旨在全面介绍合泰BS86D20A单片机的内存管理机制。从内存架构与组成、内存分配策略、内存访问控制开始,详细探讨了该单片机的内存管理基础。接着,深入分析了内存管理优化技术,包括缓存机制、内存泄漏检测与预防、内存池管理等,以提高系统性能并减少内存问题。通过实际应用案例,阐述了合泰BS86D20A在实时操作系统和复杂嵌入式系统中的内
霍尼韦尔SIS系统培训与合规性:打造团队技能与行业标准的同步提升

# 摘要
霍尼韦尔SIS系统作为保障工业安全的关键技术,其有效性和合规性对工业操作至关重要。本文综合概述了SIS系统的核心理论和应用,探讨了其工作原理、安全标准、法规合规性以及风险评估和管理的重要性。同时,本文还强调了培训在提高SIS系统操作人员技能中的作用,以及合规性管理、系统维护和持续改进的必要性。通过行业
H9000系统与工业互联网融合:趋势洞察与实战机遇
# 摘要
H9000系统作为先进的工业控制系统,其在工业互联网中的应用趋势及其与工业互联网平台的深度融合是本论文研究的核心。本文首先概述了H9000系统的基本情况以及工业互联网的总体框架,随后深入探讨了H9000系统在数字化转型、物联网技术整合和平台架构集成方面的具体应用实例。文章进一步分析了H9000系统在智能制造领域的实践应用,包括生产过程优化、设备维护管理、供应链协同等关键环节,并就系
【Ansys电磁场分析高级】:非线性材料模拟与应用,深度解析
# 摘要
非线性材料在电磁场分析中的应用是现代材料科学与电磁学交叉研究的重要领域。本文首先介绍了非线性材料的基本理论,包括其电磁特性的基础知识、分类、电磁场方程与边界条件以及数学模型。然后,阐述了Ansys软件在非线性材料电磁场分析中的应用,详细描述了模拟设置、步骤及结果分析与验证。随后,通过电磁场中非线性磁性与电介质材料的模拟案例研
【N-CMAPSS数据集的算法优化】:实现高效预测的十项关键技巧
# 摘要
N-CMAPSS数据集为工业系统提供了关键的故障预测信息,其应用及优化对于提高预测准确性和模型效率至关重要。本文系统地介绍了N-CMAPSS数据集的结构、内容及其在深度学习中的应用。通过详细的数据预处理和特征工程,以及对算法优化和超参数调优的深入分析,本文阐述了如何构建和优化高效预测模型。此外,本文还探讨了模型融合、集成学习和特征与模型的协同优化等高效预测
【电源管理设计】:确保Spartan7_XC7S15 FPGA稳定运行的关键策略

# 摘要
随着电子设备性能的不断提升,电源管理设计变得尤为重要。本文首先阐述了电源管理设计的必要性和基本原则,接着详细介绍了Spartan7_XC7S15 FPGA的基础知识及其电源需求,为设计高效稳定的电源管理电路提供了理论基础。在第三章中,讨论了电源管理IC的选择以及电源
MAX7000芯片I_O配置与扩展技巧:专家揭秘手册中的隐藏功能

# 摘要
本文详细介绍了MAX7000系列芯片的I/O基础与高级特性,并深入解析了I/O端口结构、配置方法及其在硬件与软件层面的扩展技巧。通过对MAX7000芯片I/O配置与扩展的案例分析,阐述了其在工业级应用和高密度I/O场景中的实际应用,同时探讨了隐藏功能的创新应用。文章最后展望了MAX7000芯片的未来技术发展趋势以及面临的挑战与机遇,并强调了新兴技术与行业标准对芯片设计和I/O扩展的长远影响。
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )