OpenCV红绿灯识别优化技巧:提升性能与效率,打造更流畅交通
发布时间: 2024-08-09 20:10:17 阅读量: 20 订阅数: 35 
# 1. OpenCV红绿灯识别概述
OpenCV(Open Source Computer Vision Library)是一个开源的计算机视觉库,广泛用于图像和视频处理。在红绿灯识别领域,OpenCV提供了丰富的算法和工具,可以帮助开发人员快速构建高效的识别系统。
OpenCV红绿灯识别系统通常包括图像采集、预处理、特征提取、分类器训练和识别等步骤。图像采集涉及从摄像头或视频流获取图像。预处理包括图像降噪、增强、分割和目标提取,以提高图像质量和识别准确性。特征提取通过颜色空间转换和特征选取来提取图像中的相关特征。分类器训练使用训练数据集训练分类器,该分类器用于将提取的特征分类为红、绿或黄灯。识别阶段将新图像中的特征输入到训练好的分类器中,以确定红绿灯的状态。
# 2. OpenCV红绿灯识别算法优化
### 2.1 图像预处理优化
#### 2.1.1 图像降噪和增强
**图像降噪**
图像降噪旨在去除图像中的噪声,提高图像质量。常用的降噪方法包括:
- **均值滤波:**用图像中像素的平均值替换每个像素,平滑图像并去除高频噪声。
- **中值滤波:**用图像中像素的中值替换每个像素,去除椒盐噪声和孤立像素。
- **高斯滤波:**用高斯核与图像卷积,平滑图像并去除高斯噪声。
**图像增强**
图像增强旨在提高图像的对比度、亮度和清晰度,使其更适合后续处理。常用的增强方法包括:
- **直方图均衡化:**调整图像的直方图,使图像的像素分布更均匀,提高对比度。
- **伽马校正:**调整图像的伽马值,改变图像的整体亮度和对比度。
- **锐化:**使用锐化算子与图像卷积,增强图像的边缘和细节。
**代码块:**
```python
import cv2
# 图像降噪
img = cv2.imread('image.jpg')
img_denoised = cv2.GaussianBlur(img, (5, 5), 0)
# 图像增强
img_enhanced = cv2.equalizeHist(img_denoised)
```
**逻辑分析:**
* `cv2.GaussianBlur()`函数使用高斯核对图像进行降噪,`(5, 5)`表示高斯核的大小。
* `cv2.equalizeHist()`函数对图像进行直方图均衡化,提高图像对比度。
#### 2.1.2 图像分割和目标提取
**图像分割**
图像分割将图像划分为不同的区域或对象,以便于后续目标提取。常用的分割方法包括:
- **阈值分割:**根据像素的强度或颜色值将图像划分为不同的区域。
- **区域生长:**从种子点开始,将具有相似特征的像素分组到同一个区域。
- **边缘检测:**检测图像中的边缘,并根据边缘将图像划分为不同的区域。
**目标提取**
目标提取从分割后的图像中提取感兴趣的对象。常用的提取方法包括:
- **轮廓提取:**提取图像中对象的轮廓,形成一组闭合曲线。
- **连通域分析:**将图像中具有相同特征的连通像素分组到同一个对象。
- **目标检测:**使用预训练的模型或算法检测和定位图像中的特定对象。
**代码块:**
```python
import cv2
# 图像分割
img = cv2.imread('image.jpg')
img_segmented = cv2.threshold(img, 127, 255, cv2.THRESH_BINARY)[1]
# 目标提取
contours, hierarchy = cv2.findContours(img_segmented, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
```
**逻辑分析:**
* `cv2.threshold()`函数使用阈值分割将图像分割为二值图像。
* `cv2.findContours()`函数提取图像中的轮廓,`cv2.RETR_EXTERNAL`只提取外部轮廓。
### 2.2 特征提取优化
#### 2.2.1 颜色空间转换和特征选取
**颜色空间转换**
图像的颜色空间影响特征提取的效果。常用的颜色空间转换包括:
- **RGB:**红、绿、蓝三通道的颜色空间。
- **HSV:**色调、饱和度、明度的颜色空间。
- **YCbCr:**亮度、色度和色度差的颜色空间。
**特征选取**
特征选取从图像中提取与目标识别相关的特征。常用的特征选取方法包括:
- **颜色直方图:**统计图像中每个颜色通道的像素分布。
- **纹理特征:**描述图像中纹理模式的特征,如局部二值模式(LBP)。
- **形状特征:**描述图像中对象的形状和轮廓的特征,如圆度、面积和周长。
**代码块:**
```python
import cv2
# 颜色空间转换
img = cv2.imread('image.jpg')
img_hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)
# 特征选取
hist = cv2.calcHist([img_hsv], [0, 1], None, [256, 256], [0, 256, 0, 256])
```
**逻辑分析:**
* `cv2.cvtColor()`函数将图像从BGR颜色空间转换为HSV颜色空间。
* `cv2.calcHist()`函数计算图像的二维颜色直方图。
#### 2.2.2 特征降维和分类器选择
**特征降维**
特征降维将高维特征空间降维到低维空间,减少特征冗余和计算量。常用的降维方法包括:
- **主成分分析(PCA):**将特征空间投影到方差最大的方向上。
- **线性判别分析(LDA):**将特征空间投影到类间方差最大的方向上。
- **t-分布随机邻域嵌入(t-SNE):**将高维特征空间映射到低维空间,保留局部和全局结构。
**分类器选择**
分类器根据提取的特征对图像进行分类。常用的分类器包括:
- **支持向量机(SVM):**通过寻找最大间隔将数据分类的分类器。
- **决策树:**通过一系列决策规则将数据分类的分类器。
- **神经网络:**通过层层学习提取特征并进行分类的分类器。
**代码块:**
```python
import sklearn.decomposition
import sklearn.svm
# 特征降维
pca = sklearn.decomposition.PCA(n_components=2)
features_reduced = pca.fit_transform(features)
# 分类器选择
clf = sklearn.svm.SVC()
clf.fit(features_reduced, labels)
```
**逻辑分析:**
* `s

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了使用 OpenCV 进行红绿灯识别的技术,旨在打造智能交通系统。文章涵盖了算法原理、实现指南、图像增强秘诀、特征提取技巧、实时应用指南、交通安全应用、智能城市建设、无人驾驶赋能、优化技巧、常见问题解决、边缘计算、迁移学习、深度学习、计算机视觉和交通工程等方面。通过这些文章,读者可以掌握红绿灯识别技术,为智能交通系统的发展做出贡献,从而提升交通效率、保障交通安全、打造更智能、更安全的城市。
专栏目录
最低0.47元/天 解锁专栏
买1年送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【R语言Capet包集成挑战】:解决数据包兼容性问题与优化集成流程
# 1. R语言Capet包集成概述
随着数据分析需求的日益增长,R语言作为数据分析领域的重要工具,不断地演化和扩展其生态系统。Capet包作为R语言的一个新兴扩展,极大地增强了R在数据处理和分析方面的能力。本章将对Capet包的基本概念、功能特点以及它在R语言集成中的作用进行概述,帮助读者初步理解Capet包及其在
R语言数据透视表创建与应用:dplyr包在数据可视化中的角色
# 1. dplyr包与数据透视表基础
在数据分析领域,dplyr包是R语言中最流行的工具之一,它提供了一系列易于理解和使用的函数,用于数据的清洗、转换、操作和汇总。数据透视表是数据分析中的一个重要工具,它允许用户从不同角度汇总数据,快速生成各种统计报表。
数据透视表能够将长格式数据(记录式数据)转换为宽格式数据(分析表形式),从而便于进行
【formatR包兼容性分析】:确保你的R脚本在不同平台流畅运行
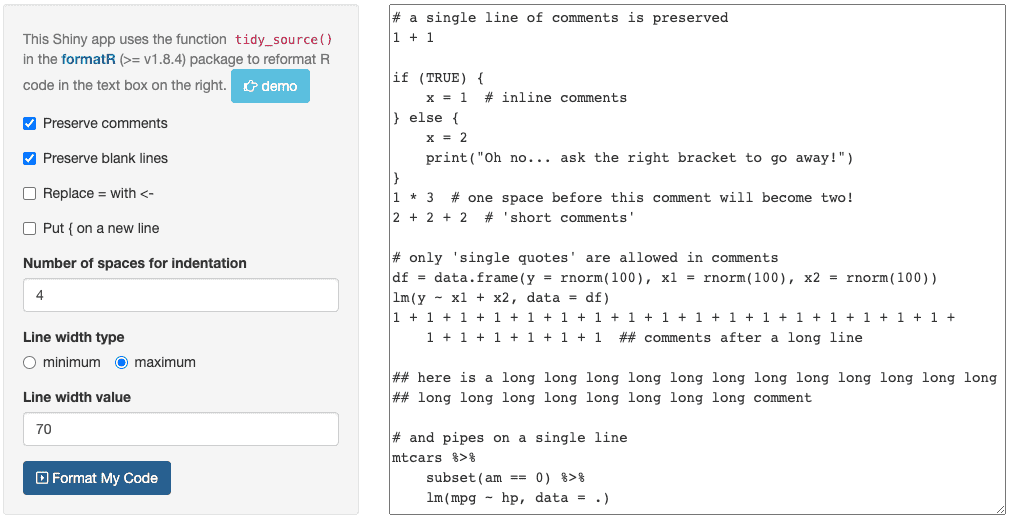
# 1. formatR包简介与安装配置
## 1.1 formatR包概述
formatR是R语言的一个著名包,旨在帮助用户美化和改善R代码的布局和格式。它提供了许多实用的功能,从格式化代码到提高代码可读性,它都是一个强大的辅助工具。通过简化代码的外观,formatR有助于开发人员更快速地理解和修改代码。
## 1.2 安装formatR
安装formatR包非常简单,只需打开R控制台并输入以下命令:
```R
install.pa
R语言复杂数据管道构建:plyr包的进阶应用指南

# 1. R语言与数据管道简介
在数据分析的世界中,数据管道的概念对于理解和操作数据流至关重要。数据管道可以被看作是数据从输入到输出的转换过程,其中每个步骤都对数据进行了一定的处理和转换。R语言,作为一种广泛使用的统计计算和图形工具,完美支持了数据管道的设计和实现。
R语言中的数据管道通常通过特定的函数来实现
【R语言数据包mlr的深度学习入门】:构建神经网络模型的创新途径
# 1. R语言和mlr包的简介
## 简述R语言
R语言是一种用于统计分析和图形表示的编程语言,广泛应用于数据分析、机器学习、数据挖掘等领域。由于其灵活性和强大的社区支持,R已经成为数据科学家和统计学家不可或缺的工具之一。
## mlr包的引入
mlr是R语言中的一个高性能的机器学习包,它提供了一个统一的接口来使用各种机器学习算法。这极大地简化了模型的选择、训练
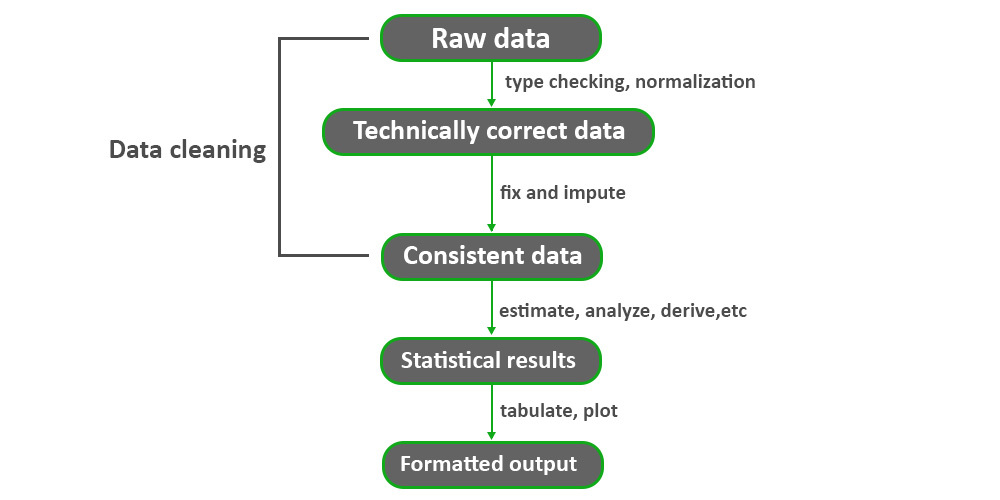
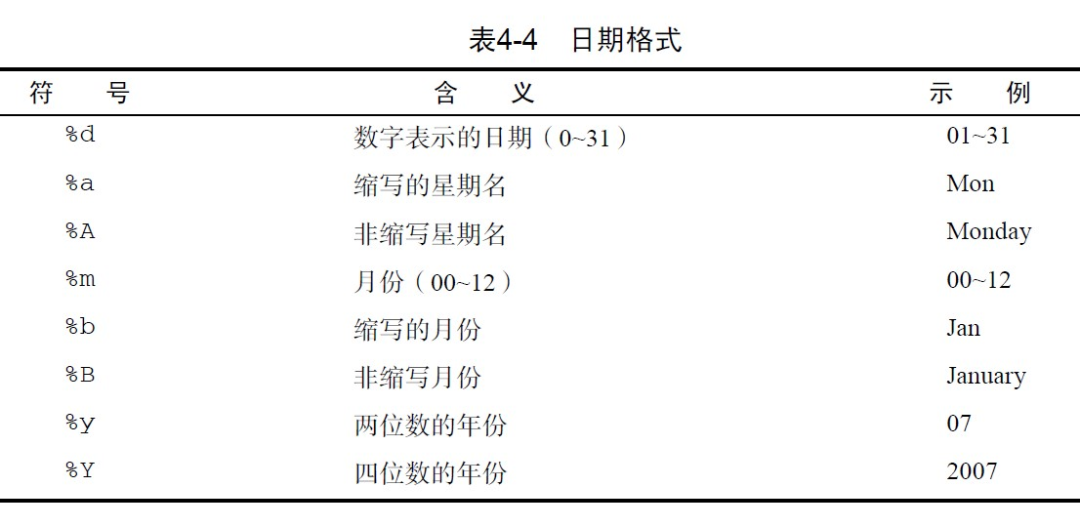
时间数据统一:R语言lubridate包在格式化中的应用
# 1. 时间数据处理的挑战与需求
在数据分析、数据挖掘、以及商业智能领域,时间数据处理是一个常见而复杂的任务。时间数据通常包含日期、时间、时区等多个维度,这使得准确、高效地处理时间数据显得尤为重要。当前,时间数据处理面临的主要挑战包括但不限于:不同时间格式的解析、时区的准确转换、时间序列的计算、以及时间数据的准确可视化展示。
为应对这些挑战,数据处理工作需要满足以下需求:
【R语言MCMC探索性数据分析】:方法论与实例研究,贝叶斯统计新工具
# 1. MCMC方法论基础与R语言概述
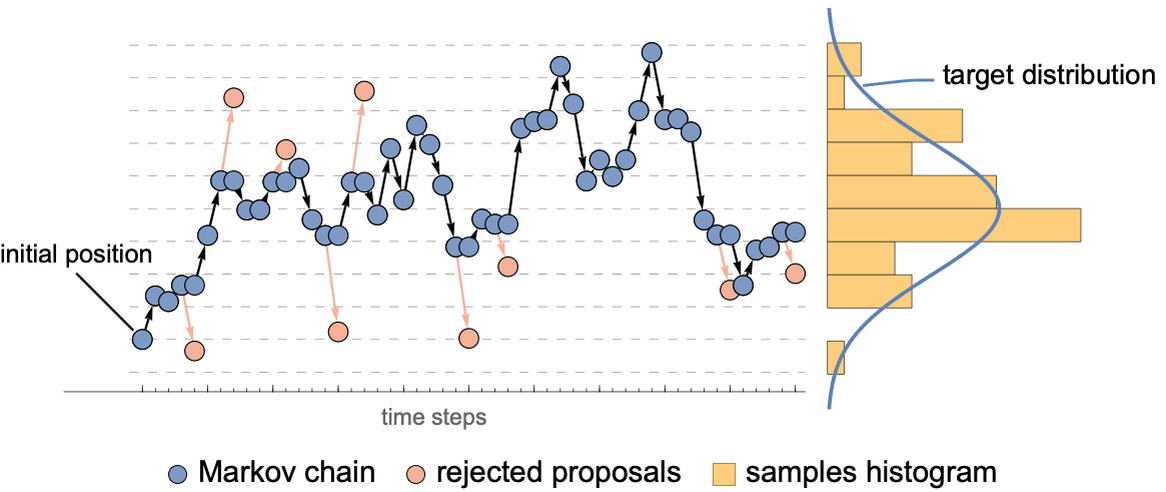
## 1.1 MCMC方法论简介
**MCMC (Markov Chain Monte Carlo)** 方法是一种基于马尔可夫链的随机模拟技术,用于复杂概率模型的数值计算,特别适用于后验分布的采样。MCMC通过构建一个马尔可夫链,
【R语言大数据整合】:data.table包与大数据框架的整合应用

# 1. R语言中的data.table包概述
## 1.1 data.table的定义和用途
`data.table` 是 R 语言中的一个包,它为高效的数据操作和分析提供了工具。它适用于处理大规模数据集,并且可以实现快速的数据读取、合并、分组和聚合操作。`data.table` 的语法简洁,使得代码更易于阅读和维
R语言数据处理高级技巧:reshape2包与dplyr的协同效果

# 1. R语言数据处理概述
在数据分析和科学研究中,数据处理是一个关键的步骤,它涉及到数据的清洗、转换和重塑等多个方面。R语言凭借其强大的统计功能和包生态,成为数据处理领域的佼佼者。本章我们将从基础开始,介绍R语言数据处理的基本概念、方法以及最佳实践,为后续章节中具体的数据处理技巧和案例打下坚实的基础。我们将探讨如何利用R语言强大的包和
从数据到洞察:R语言文本挖掘与stringr包的终极指南

# 1. 文本挖掘与R语言概述
文本挖掘是从大量文本数据中提取有用信息和知识的过程。借助文本挖掘,我们可以揭示隐藏在文本数据背后的信息结构,这对于理解用户行为、市场趋势和社交网络情绪等至关重要。R语言是一个广泛应用于统计分析和数据科学的语言,它在文本挖掘领域也展现出强大的功能。R语言拥有众多的包,能够帮助数据科学
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )