单片机微课程序设计实战指南:从案例中领悟精髓,快速上手实战应用
发布时间: 2024-07-10 05:04:04 阅读量: 57 订阅数: 24 

浅析微课在C语言程序设计教学中的应用.doc

# 1. 单片机微课程序设计概述
单片机微课程序设计是一种使用单片机进行程序开发的学科。单片机是一种微型计算机,具有处理器、存储器和输入/输出接口等基本功能,广泛应用于各种电子设备中。单片机微课程序设计涉及到硬件和软件两个方面,需要掌握单片机硬件结构、C语言基础语法、单片机开发环境搭建等知识。通过学习单片机微课程序设计,可以掌握单片机控制原理、编程方法,并能够设计和实现各种单片机应用系统。
# 2. 单片机微课程序设计基础
### 2.1 单片机微课程序设计环境搭建
#### 2.1.1 开发工具的选择和安装
**Keil uVision5**
* 是一款功能强大的单片机集成开发环境(IDE),支持多种单片机型号。
* 提供代码编辑、编译、调试、仿真等功能。
* 可从官方网站下载并安装。
**IAR Embedded Workbench**
* 另一款流行的单片机IDE,提供类似Keil uVision5的功能。
* 具有较好的代码自动补全和语法检查功能。
* 可从官方网站下载并安装。
#### 2.1.2 代码编写和调试
**代码编写**
* 使用C语言编写单片机程序,遵循C语言语法规则。
* 编写代码时,注意代码结构、变量声明、函数调用等细节。
**代码调试**
* 使用IDE提供的调试功能,如断点设置、单步执行、变量监视等。
* 通过调试,可以找出代码中的错误并进行修改。
### 2.2 单片机微课程序设计语言基础
#### 2.2.1 C语言基础语法
**数据类型**
* int:整型
* float:浮点型
* char:字符型
* double:双精度浮点型
**运算符**
* +、-、*、/:算术运算符
* ==、!=、>、<:比较运算符
* &&、||:逻辑运算符
**控制语句**
* if-else:条件语句
* while、for:循环语句
* switch-case:选择语句
#### 2.2.2 单片机微课程序设计中C语言的应用
**单片机寄存器访问**
* 使用指针访问单片机寄存器,如:*P0 = 0xFF;
* 寄存器地址定义在头文件中,如:SFR_P0
**中断处理**
* 使用C语言编写中断服务程序,如:void ISR_UART0() { ... }
* 中断服务程序在中断发生时执行。
### 2.3 单片机微课程序设计硬件基础
#### 2.3.1 单片机微课程序设计中常用的硬件模块
**LED**
* 发光二极管,用于指示状态或输出信息。
* 控制LED亮灭需要使用GPIO模块。
**按键**
* 输入设备,用于用户交互。
* 按键按下时,会产生中断信号。
**串口**
* 通信接口,用于与外部设备通信。
* 使用UART模块进行串口通信。
#### 2.3.2 单片机微课程序设计中硬件接口的应用
**GPIO接口**
* 通用输入/输出接口,用于控制外部设备。
* 可配置为输入或输出模式。
**UART接口**
* 通用异步收发传输器,用于串口通信。
* 具有发送和接收数据的功能。
**定时器接口**
* 定时器,用于产生定时中断或产生PWM信号。
* 可配置为不同的定时模式。
# 3.1 LED灯闪烁控制
#### 3.1.1 LED灯闪烁控制原理
LED灯闪烁控制是单片机微课程序设计中最基本的应用之一。其原理是利用单片机的I/O口控制LED灯的通断,从而实现LED灯的闪烁效果。
LED灯闪烁控制的原理图如下:
```mermaid
graph LR
subgraph 单片机
A[单片机]
B[I/O口]
end
subgraph LED灯
C[LED灯]
end
A-->B
B-->C
```
当单片机的I/O口输出高电平时,LED灯点亮;当单片机的I/O口输出低电平时,LED灯熄灭。通过控制I/O口的输出电平,就可以实现LED灯的闪烁效果。
#### 3.1.2 LED灯闪烁控制程序设计
LED灯闪烁控制程序设计的基本流程如下:
1. 初始化单片机的I/O口,将其设置为输出模式。
2. 在主循环中,不断地将I/O口的输出电平从高电平切换到低电平,再从低电平切换到高电平。
3. 控制LED灯闪烁的频率和占空比,可以通过调整主循环中的延时时间来实现。
以下是一个简单的LED灯闪烁控制程序示例:
```c
#include <reg51.h>
void main()
{
P1 = 0x00; // 初始化P1口为输出模式
while (1)
{
P1 = 0xFF; // 输出高电平,LED灯点亮
delay_ms(500); // 延时500ms
P1 = 0x00; // 输出低电平,LED灯熄灭
delay_ms(500); // 延时500ms
}
}
```
在这个程序中,P1口被初始化为输出模式。在主循环中,P1口的输出电平不断地从高电平切换到低电平,再从低电平切换到高电平。延时时间为500ms,因此LED灯的闪烁频率为1Hz,占空比为50%。
# 4. 单片机微课程序设计进阶应用
### 4.1 定时器应用
#### 4.1.1 定时器原理
定时器是一种硬件模块,用于产生周期性的脉冲信号或产生指定延时时间。单片机中常用的定时器有定时器/计数器(Timer/Counter),它既可以作为定时器使用,也可以作为计数器使用。
定时器的工作原理是:通过设置定时器的时钟源和分频系数,可以产生不同频率的脉冲信号。定时器还可以通过设置比较值,在脉冲信号达到比较值时产生中断。
#### 4.1.2 定时器程序设计
使用定时器进行程序设计时,需要对定时器进行配置,包括时钟源、分频系数、比较值等。
```c
// 定时器0初始化,使用系统时钟,分频系数为128
TCCR0A = 0x00;
TCCR0B = 0x02;
OCR0A = 255; // 比较值,当TCNT0达到255时产生中断
// 开启定时器0中断
TIMSK0 = 0x02;
```
在定时器中断服务程序中,可以执行需要定时执行的任务。
```c
ISR(TIMER0_COMPA_vect) {
// 定时器0中断服务程序
// 执行需要定时执行的任务
}
```
### 4.2 中断应用
#### 4.2.1 中断原理
中断是一种硬件机制,当外部事件或内部事件发生时,可以暂停当前正在执行的程序,转而执行中断服务程序。中断服务程序执行完成后,程序再从中断发生处继续执行。
单片机中常用的中断源有外部中断、定时器中断、串口中断等。
#### 4.2.2 中断程序设计
使用中断进行程序设计时,需要对中断进行配置,包括中断源、中断优先级等。
```c
// 配置外部中断0,上升沿触发
EICRA |= (1 << ISC00);
EICRA &= ~(1 << ISC01);
// 开启外部中断0中断
EIMSK |= (1 << INT0);
```
在中断服务程序中,可以执行需要在中断发生时执行的任务。
```c
ISR(INT0_vect) {
// 外部中断0中断服务程序
// 执行需要在中断发生时执行的任务
}
```
### 4.3 PWM应用
#### 4.3.1 PWM原理
PWM(Pulse Width Modulation,脉宽调制)是一种调制技术,通过改变脉冲的宽度来控制输出信号的平均值。
单片机中常用的PWM模块是定时器/计数器,它可以产生可变占空比的PWM信号。PWM信号的占空比由比较值和定时器计数值决定。
#### 4.3.2 PWM程序设计
使用PWM进行程序设计时,需要对PWM模块进行配置,包括时钟源、分频系数、比较值等。
```c
// PWM初始化,使用系统时钟,分频系数为128
TCCR1A = 0x81;
TCCR1B = 0x19;
OCR1A = 255; // 比较值,控制PWM信号的占空比
// 开启PWM输出
DDRB |= (1 << PB1); // 将PB1设置为输出引脚
```
通过改变OCR1A的值,可以控制PWM信号的占空比。
# 5. 单片机微课程序设计项目实战
### 5.1 智能家居控制系统
#### 5.1.1 智能家居控制系统概述
智能家居控制系统是一种利用单片机微课程序设计技术,实现对家居环境中各种电器设备的智能化控制和管理的系统。它通过传感器、执行器和通信模块等硬件设备,以及单片机微课程序设计软件,实现对家居环境中灯光、空调、窗帘、安防等设备的远程控制、定时控制、联动控制等功能,为用户提供更加舒适、便捷、智能化的家居生活体验。
#### 5.1.2 智能家居控制系统程序设计
智能家居控制系统程序设计主要涉及以下几个方面:
- **传感器数据采集:**通过传感器采集家居环境中的各种数据,如温度、湿度、光照、人体红外等,并将其转换为电信号输入单片机微控制器。
- **执行器控制:**根据传感器采集的数据和用户指令,通过单片机微控制器控制执行器,如继电器、电机等,实现对家居设备的开关、调节等操作。
- **通信模块管理:**通过通信模块,如无线通信模块、有线通信模块等,实现智能家居控制系统与外部网络的连接,支持远程控制、数据传输等功能。
- **程序逻辑设计:**根据智能家居控制系统的功能需求,设计单片机微课程序的逻辑流程,包括数据采集、处理、控制、通信等模块的实现。
### 5.2 机器人控制系统
#### 5.2.1 机器人控制系统概述
机器人控制系统是一种利用单片机微课程序设计技术,实现对机器人运动、感知、决策等功能的控制和管理的系统。它通过传感器、执行器和通信模块等硬件设备,以及单片机微课程序设计软件,实现对机器人运动轨迹的规划、动作控制、环境感知、决策执行等功能,赋予机器人自主移动、避障、交互等能力。
#### 5.2.2 机器人控制系统程序设计
机器人控制系统程序设计主要涉及以下几个方面:
- **传感器数据采集:**通过传感器采集机器人自身状态和周围环境的数据,如位置、速度、加速度、距离等,并将其转换为电信号输入单片机微控制器。
- **执行器控制:**根据传感器采集的数据和控制算法,通过单片机微控制器控制执行器,如电机、舵机等,实现机器人的运动控制、动作执行等功能。
- **环境感知:**通过传感器采集机器人周围环境的数据,如障碍物、目标物等,并进行数据处理和分析,实现机器人的环境感知能力。
- **决策执行:**根据传感器采集的数据和环境感知的结果,通过单片机微课程序设计实现机器人的决策执行,如路径规划、避障算法、目标追踪等功能。
# 6. 单片机微课程序设计疑难解答
### 6.1 常见问题及解决方法
#### 6.1.1 程序编译错误
- **错误:**`undefined reference to 'main'`
- **解决方法:**确保程序中存在`main`函数,并且函数签名正确。
- **错误:**`syntax error: expected expression before '}' token`
- **解决方法:**检查代码中是否存在未闭合的花括号`{`。
- **错误:**`identifier 'x' is undefined`
- **解决方法:**确保变量`x`已声明并初始化。
#### 6.1.2 程序运行异常
- **异常:**程序卡死
- **解决方法:**使用调试工具(如GDB)检查程序执行流程,并找出导致卡死的代码段。
- **异常:**程序输出错误结果
- **解决方法:**检查代码中的逻辑错误,确保算法和数据处理正确。
- **异常:**程序无法访问硬件设备
- **解决方法:**检查硬件连接是否正确,并确保程序中对硬件设备的配置和操作正确。
### 6.2 高级疑难解答技巧
#### 6.2.1 调试工具的使用
- **GDB(GNU调试器):**强大的调试工具,允许设置断点、单步执行代码、检查变量值。
- **printf调试:**在代码中使用`printf`函数输出变量值或调试信息,帮助定位问题。
#### 6.2.2 代码优化和性能提升
- **代码重构:**重构代码以提高可读性和可维护性。
- **优化算法:**使用更有效的算法来减少计算时间。
- **优化数据结构:**选择合适的数据结构来提高数据访问效率。
- **代码分析工具:**使用代码分析工具(如Clang Static Analyzer)来查找潜在问题和优化建议。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《单片机微课程序设计》专栏旨在从零基础到精通,全面系统地教授单片机微课程序设计。专栏涵盖单片机开发必备技能、架构与原理、实战指南、常见问题与解决方案、调试技巧、性能优化、内存管理、中断处理、通信技术、传感器应用、电机控制、PID控制、图像处理、无线通信、嵌入式操作系统、安全设计、故障诊断与维护、项目管理、团队协作和职业发展等内容。通过深入浅出的讲解、丰富的案例和实战经验分享,专栏帮助读者快速入门单片机微课程序设计,掌握开发技巧,提升开发效率,打造高效可靠的系统,并为职业发展提供指导。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
datasheet解读速成课:关键信息提炼技巧,提升采购效率

# 摘要
本文全面探讨了datasheet在电子组件采购过程中的作用及其重要性。通过详细介绍datasheet的结构并解析其关键信息,本文揭示了如何通过合理分析和利用datasheet来提升采购效率和产品质量。文中还探讨了如何在实际应用中通过标准采购清单、成本分析以及数据整合来有效使用datasheet信息,并通过案例分析展示了datasheet在采购决策中的具体应用。最后,本文预测了datasheet智能化处
【光电传感器应用详解】:如何用传感器引导小车精准路径

# 摘要
光电传感器在现代智能小车路径引导系统中扮演着核心角色,涉及从基础的数据采集到复杂的路径决策。本文首先介绍了光电传感器的基础知识及其工作原理,然后分析了其在小车路径引导中的理论应用,包括传感器布局、导航定位、信号处理等关键技术。接着,文章探讨了光电传感器与小车硬件的集成过程,包含硬件连接、软件编程及传感器校准。在实践部分,通过基
新手必看:ZXR10 2809交换机管理与配置实用教程
# 摘要
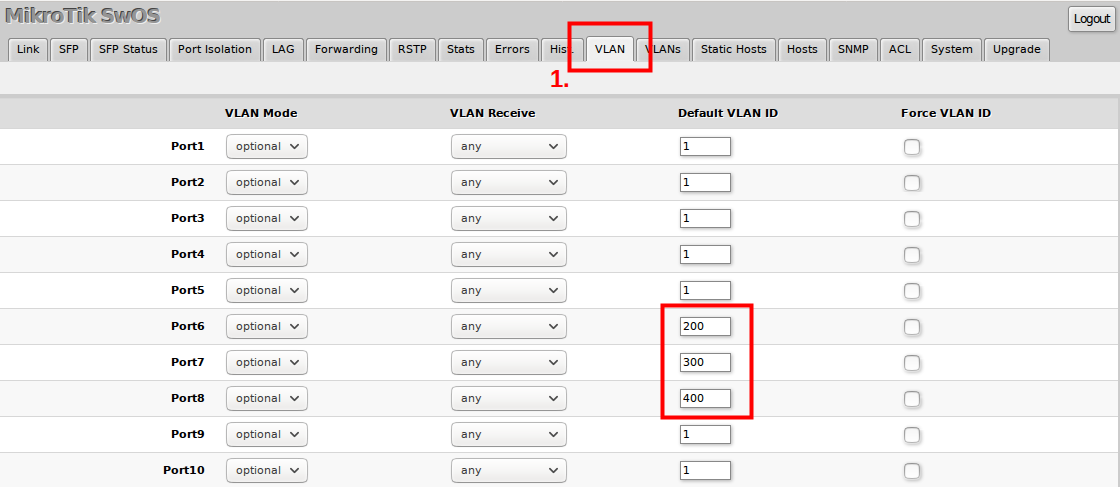
ZXR10 2809交换机作为网络基础设施的关键设备,其配置与管理是确保网络稳定运行的基础。本文首先对ZXR10 2809交换机进行概述,并介绍了基础管理知识。接着,详细阐述了交换机的基本配置,包括物理连接、初始化配置、登录方式以及接口的配置与管理。第三章深入探讨了网络参数的配置,VLAN的创建与应用,以及交换机的安全设置,如ACL配置和端口安全。第四章涉及高级网络功能,如路由配置、性能监控、故障排除和网络优
加密技术详解:专家级指南保护你的敏感数据
# 摘要
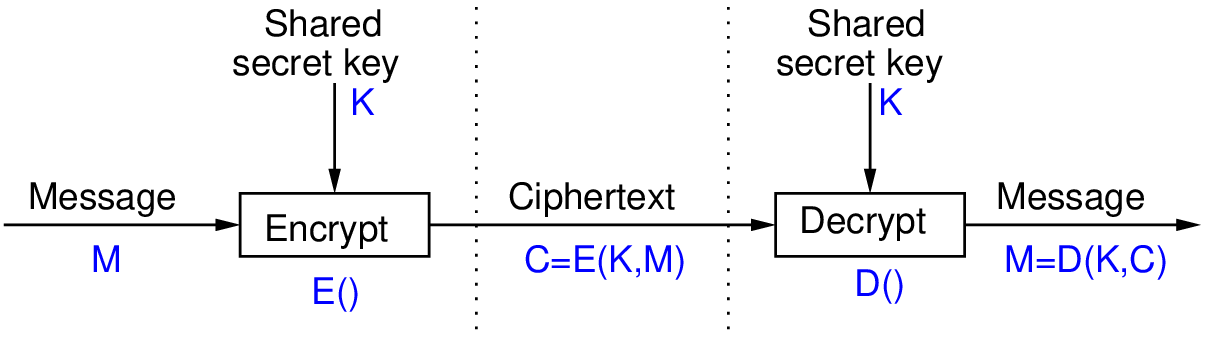
本文系统介绍了加密技术的基础知识,深入探讨了对称加密与非对称加密的理论和实践应用。分析了散列函数和数字签名在保证数据完整性与认证中的关键作用。进一步,本文探讨了加密技术在传输层安全协议TLS和安全套接字层SSL中的应用,以及在用户身份验证和加密策略制定中的实践。通过对企业级应用加密技术案例的分析,本文指出了实际应用中的挑战与解决方案,并讨论了相关法律和合规问题。最后,本文展望了加密技术的未来发展趋势,特别关注了量
【16串电池监测AFE选型秘籍】:关键参数一文读懂

# 摘要
本文全面介绍了电池监测AFE(模拟前端)的原理和应用,着重于其关键参数的解析和选型实践。电池监测AFE是电池管理系统中不可或缺的一部分,负责对电池的关键性能参数如电压、电流和温度进行精确测量。通过对AFE基本功能、性能指标以及电源和通信接口的分析,文章为读者提供了选择合适AFE的实用指导。在电池监测AFE的集成和应用章节中
VASPKIT全攻略:从安装到参数设置的完整流程解析

# 摘要
VASPKIT是用于材料计算的多功能软件包,它基于密度泛函理论(DFT)提供了一系列计算功能,包括能带计算、动力学性质模拟和光学性质分析等。本文系统介绍了VASPKIT的安装过程、基本功能和理论基础,同时提供了实践操作的详细指南。通过分析特定材料领域的应用案例,比如光催化、
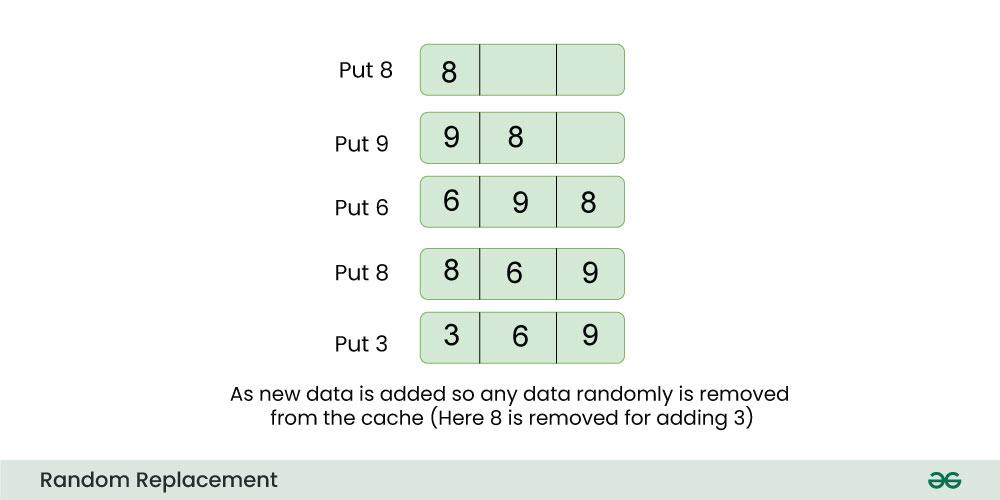
【Exynos 4412内存管理剖析】:高速缓存策略与性能提升秘籍
# 摘要
本文对Exynos 4412处理器的内存管理进行了全面概述,深入探讨了内存管理的基础理论、高速缓存策略、内存性能优化技巧、系统级内存管理优化以及新兴内存技术的发展趋势。文章详细分析了Exynos 4412的内存架构和内存管理单元(MMU)的功能,探讨了高速缓存架构及其对性能的影响,并提供了一系列内存管理实践技巧和性能提升秘籍。此外,
慧鱼数据备份与恢复秘籍:确保业务连续性的终极策略(权威指南)
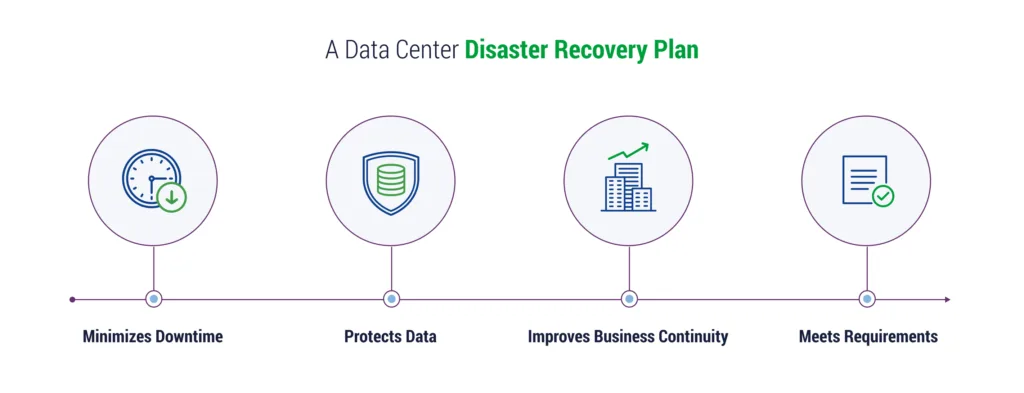
# 摘要
本文全面探讨了数据备份与恢复的基础概念,备份策略的设计与实践,以及慧鱼备份技术的应用。通过分析备份类型、存储介质选择、备份工具以及备份与恢复策略的制定,文章提供了深入的技术见解和配置指导。同时,强调了数据恢复的重要性,探讨了数据恢复流程、策略以及慧鱼数据恢复工具的应用。此
【频谱分析与Time Gen:建立波形关系的新视角】:解锁频率世界的秘密
# 摘要
本文旨在探讨频谱分析的基础理论及Time Gen工具在该领域的应用。首先介绍频谱分析的基本概念和重要性,然后详细介绍Time Gen工具的功能和应用场景。文章进一步阐述频谱分析与Time Gen工具的理论结合,分析其在信号处理和时间序列分析中的作用。通过多个实践案例,本文展示了频谱分析与Time Gen工具相结合的高效性和实用性,并探讨了其在高级应用中的潜在方向和优势。本文为相关领域的研究人员和工程师
【微控制器编程】:零基础入门到编写你的首个AT89C516RD+程序
# 摘要
本文深入探讨了微控制器编程的基础知识和AT89C516RD+微控制器的高级应用。首先介绍了微控制器的基本概念、组成架构及其应用领域。随后,文章详细阐述了AT89C516RD+微控制器的硬件特性、引脚功能、电源和时钟管理。在软件开发环境方面,本文讲述了Keil uVision开发工具的安装和配置,以及编程语言的使用。接着,文章引导读者通过实例学习编写和调试AT89C516RD+的第一个程序,并探讨了微控制器在实践应用中的接口编程和中断驱动设计。最后,本文提供了高级编程技巧,包括实时操作系统的应用、模块集成、代码优化及安全性提升方法。整篇文章旨在为读者提供一个全面的微控制器编程学习路径,
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )