【C++并发编程】:std::unordered_map线程安全的正确操作
发布时间: 2024-10-22 23:01:10 订阅数: 2 
# 1. 并发编程与线程安全基础
在现代软件开发中,随着多核处理器的普及,应用程序往往需要并发执行多个任务以提高效率。并发编程涉及多个线程或进程同时执行,它们可能需要共享资源,这就涉及到线程安全的问题。线程安全是指当多个线程访问一个对象时,该对象的状态仍然可以保持一致的特性。
理解并发编程的基础概念是至关重要的,包括线程、进程、同步、死锁、竞态条件等。在实际编程实践中,线程安全的实现通常需要借助各种同步机制,如互斥锁、信号量、条件变量等。而C++作为一门高性能语言,在其标准库中提供了丰富的并发支持,使得开发者可以更容易地编写安全、高效的并发代码。
理解这些基础概念,将为深入探索并发编程打下坚实的基础。接下来章节将详细介绍如何在C++中使用不同级别的同步机制,以及如何安全高效地处理并发访问std::unordered_map等容器。
# 2. std::unordered_map并发访问问题
## 2.1 无锁编程的概念与挑战
无锁编程是一种并发编程范式,它通过原子操作来保证在多线程环境下数据的一致性和完整性,而不需要使用传统的互斥锁。在无锁编程中,原子操作是实现并发安全访问的关键。原子操作是指那些不可分割的操作,即使在多线程的环境下,也不能被其他线程中断。这与传统的锁机制相比,可以大幅减少线程阻塞和上下文切换带来的开销,从而提高并发程序的性能。
### 2.1.1 原子操作的原理和必要性
原子操作通常通过硬件级别的指令来实现,如x86架构的CMPXCHG指令。在C++中,`std::atomic`类模板提供了一种类型安全的方式来执行原子操作。原子操作可以是读取、写入或读取-修改-写入的组合,后者通常被称为“读-改-写”操作。
原子操作的必要性体现在:
1. 数据竞争的避免:在多线程环境下,若多个线程同时访问和修改同一个变量,可能会导致数据竞争和不可预测的结果。原子操作可以保证每次只有一个线程能够修改变量,从而避免数据竞争。
2. 内存序的控制:除了保证操作的原子性,原子操作还可以指定内存序来控制操作的可见性和顺序,这对于优化性能和保证正确性至关重要。
### 2.1.2 std::atomic类模板的使用
在C++中,`std::atomic`类模板定义在`<atomic>`头文件中,它是一个通用的模板类,可以用于创建特定类型的原子对象。下面是一个简单的例子,展示了如何使用`std::atomic`来保证一个整数的自增操作是原子的:
```cpp
#include <atomic>
#include <iostream>
std::atomic<int> atomic_counter(0);
void increment_counter() {
++atomic_counter;
}
int main() {
std::thread t1(increment_counter);
std::thread t2(increment_counter);
t1.join();
t2.join();
std::cout << "Counter value: " << atomic_counter << std::endl;
return 0;
}
```
在上述代码中,我们定义了一个`std::atomic<int>`类型的对象`atomic_counter`,并在两个线程中对其执行自增操作。即使在并发访问的情况下,`std::atomic`保证了每次自增操作的原子性,从而避免了数据竞争。
### 2.1.3 原子操作的性能考量
尽管原子操作能够提供并发安全,但它们并不总是性能最优的选择。原子操作通常需要与硬件指令交互,这可能会带来一定的性能开销。因此,在实际应用中,开发者需要权衡性能和并发安全性,选择合适的同步机制。
使用原子操作时,开发者应当考虑以下几点:
- **原子操作的粒度**:应尽量使用细粒度的原子操作,因为粗粒度的原子操作会限制并发执行的能力。
- **缓存一致性**:多个处理器核心可能拥有各自独立的缓存,原子操作可能需要触发缓存一致性协议,这在多核处理器上可能会增加额外的延迟。
- **内存序**:使用原子操作时,内存序的指定需要谨慎,错误的内存序可能会导致性能问题,甚至是逻辑错误。
## 2.2 std::unordered_map的线程安全挑战
`std::unordered_map`是一个基于哈希表的容器,它在C++标准库中广泛用于存储键值对。`std::unordered_map`是动态数组,元素按顺序排列,这使得它在插入和查询操作上非常高效。然而,由于其内部使用了指向节点的指针,这导致了在并发环境下使用时遇到了许多挑战。
### 2.2.1 无锁std::unordered_map的复杂性
在多线程环境中,对`std::unordered_map`的无锁访问是一个具有挑战性的问题。要创建一个无锁的`std::unordered_map`,必须解决以下问题:
- **节点的原子分配与释放**:当元素被插入或删除时,需要安全地分配或释放存储元素的节点。
- **动态扩容**:当哈希表的负载因子过高时,它可能需要动态扩容,这涉及到重新计算哈希值和移动大量元素。
- **链表头的并发修改**:在哈希冲突解决中,元素通常通过链表连接。在并发环境下,多个线程可能会同时修改链表头,需要原子操作来保证线程安全。
### 2.2.2 锁粒度与并发性能的平衡
在实现`std::unordered_map`线程安全时,可以通过使用互斥锁(mutex)来控制对共享资源的访问。然而,过度使用互斥锁会导致线程阻塞,降低并发性能。因此,开发者需要在锁的粒度和并发性能之间找到平衡点。
常见的优化策略包括:
- **读写锁**:对于读多写少的场景,可以使用读写锁,允许多个读线程同时访问数据结构,同时保证写操作的独占访问。
- **分段锁**:通过将`std::unordered_map`分割成多个段(segment),每个段有自己的互斥锁,可以减少锁竞争,提高并发性能。
- **无锁设计**:对于特定的操作,如单个元素的读取或修改,可以设计无锁的数据结构,以避免锁的开销。
## 2.3 针对std::unordered_map的并发控制技术
针对`std::unordered_map`的并发控制,有许多技术可供选择,它们各有利弊,并且在不同的场景下适用性不同。
### 2.3.1 使用互斥锁保证线程安全
对于大多数开发者来说,使用互斥锁是最直观且容易实现的线程安全策略。互斥锁通过简单的锁机制来防止多个线程同时访问共享资源。
```cpp
#include <mutex>
#include <unordered_map>
std::unordered_map<int, int> safe_map;
std::mutex map_mutex;
void safe_insert(int key, int value) {
std::lock_guard<std::mutex> lock(map_mutex);
safe_map[key] = value;
}
int safe_query(int key) {
std::lock_guard<std::mutex> lock(map_mutex);
auto it = safe_map.find(key);
if (it != safe_map.end()) {
return it->second;
}
return -1; // Not found
}
```
在这个例子中,`safe_map`对象通过`std::mutex`保护,确保插入和查询操作的线程安全。
### 2.3.2 读写锁的使用
读写锁允许多个读操作并发执行,但写操作是独占的。在`std::unordered_map`的场景中,读写锁可以提高读操作的并发性能。
```cpp
#include <shared_mutex>
#include <unordered_map>
std::unordered_map<int, int> rw_map;
std::shared_mutex rw_mutex;
void rw_insert(int key, int value) {
std::unique_lock<std::shared_mutex> lock(rw_mutex);
rw_map[key] = value;
}
int rw_query(int key) {
std::shared_lock<std::shared_mutex> lock(rw_mutex);
auto it = rw_map.find(key);
if (it != rw_map.end()) {
return it->second;
}
return -1; // Not found
}
```
在这个例子中,`rw_map`使用`std::shared_mutex`,允许多个读线程同时访问,但写操作需要独占锁。
### 2.3.3 高级并发控制结构
高级并发控制结构,如无锁队列或并发哈希表,可以提供比传统锁机制更好的性能。然而,这些结构通常更为复杂,并且需要深厚的并发编程知识来正确使用。
```cpp
#include <atomic>
#include <unordered_map>
std::unordered_map<int, std::atomic<int>> lock_free_map;
void lock_free_insert(int key, int value) {
lock_free_map[key].store(value, std::memory_order_relaxed);
}
int lock_free_query(int key) {
auto it = lock_free_map.find(key);
if (it != lock_free_map.end()) {
return it->second.load(std::memory_order_relaxed);
}
return -1; // Not found
}
```
在这个例子中,`lock_free_map`使用`std::atomic`来保证操作的原子性,从而实现无锁访问。但需要注意的是,这种结构的正确性依赖于对原子操作和内存序的正确使用。
总结来说,针对`std::unordered_map`的并发控制技术多种多样,每种技术都有自己的适用场景。开发者在选择时需要根据具体的性能需求和实现难度进行权衡。在下一章节中,我们将详细探讨C++11中提供的其他同步机制,以及如何与`std::unordered_map`结合使用以实现高效的线程安全操作。
# 3. C++11同步机制概览
## 3.1 原子操作与std::atomic
### 3.1.1 原子操作的原理和必要性
在并发编程的场景中,原子操作是指无法被线程调度机制打断的操作,这类操作可以确保在执行过程中不会被其他线程干扰,从而保证数据的一致性和完整性。在没有原子操作的情况下,多个线程对同一数据进行读写可能会引起竞态条件,导致不可预料的结果。
原子操作的原理是利用现代CPU提供的原子指令来实现的,这些指令能够在单个指令周期内完成一个操作,而不会被操作系统的调度器打断。原子操作可以是简单的读取、写入,也可以是复杂的计算,但关键在于它们都是不可分割的。
原子操作在多线程编程中非常重要,因为它们提供了一种简单的机制来确保共享变量的安全访问。没有原子操作,程序员必须使用复杂的同步机制,如锁,来保护共享数据,这可能导致死锁、优先级反转等问题。原子操作减少了这些风险,同时也简化了代码的编写。
### 3.1.2 std::atomic类模板的使用
C++11标准库中的`std::atomic`是一个类模板,它提供了一系列用于执行原子操作的类型安全的方法。通过使用`std::atomic`,程序员可以对任意数据类型进行原子操作,这包括基本数据类型,如`int`和`bool`,以及用户定义的类型。
`std::atomic`的关键特性是它保证了操作的原子性。例如,通过`std::atomic`的`store`方法可以原子地更新一个值,而`load`方法则可以原子地读取一个值。除了`load`和`store`,`std::atomic`还提供了`fetch_add`、`fetch_sub`等方法来原子地进行加减操作。
代码块展示了一个简单的使用`std::atomic`的示例:
```cpp
#include <atomic>
#include <iostream>
int main() {
std::atomic<int> atomicInt(0);
atomicInt.fetch_add(1); // 原子地增加1
int value = atomicInt.load(); // 原子地读取
std::cout << "The atomic integer is: " << value << std::endl;
return 0;
}
```
在这个例子中,`fetch_add`操作保证了即使多个线程试图同时对`atomicInt`执行增加操作,每次也只会有一个线程成功,其他线程将等待或者重试。这样可以有效避免并发时数据竞争的问题。此外,标准库还提供了`std::atomic_flag`作为原子操作的最基本形式,但`std::atomic`的接口更为丰富和方便使用。
## 3.2 锁机制的种类与选择
### 3.2.1 互斥锁mutex的使用和理解
在多线程编程中,互斥锁(mutex)是实现线程同步的关键机制之一。互斥锁用于保护共享资源,确保在任何时刻只有一个线程可以访问该资源。当一个线程获取到互斥锁后,其他尝试获取该锁的线程将被阻塞,直到锁被释放。
互斥锁的存在是为了解决资源访问冲突问题。在没有同步机制的条件下,多个线程并发访问同一资源可能造成数据不一致,而互斥锁通过“互斥”这种手段来避免这种风险。
使用互斥锁时,主要通过以下几个函数操作:
- `mutex.lock()`: 线程尝试获取锁,如果锁已被其他线程占有,则线程将被阻塞。
- `mutex.unlock()`: 线程释放锁,允许其他等待的线程获得锁。
- `mutex.try_lock()`: 尝试获取锁,如果锁被其他线程占有,则立即返回,不阻塞线程。
例如,以下是一个使用`std::mutex`保护共享资源的示例:
```cpp
#include <iostream>
#include <thread>
#include <mutex>
std::mutex mtx;
int sharedResource = 0;
void incrementResource() {
for (int i = 0; i < 1000000; ++i) {
mtx.lock();
++sharedResource;
mtx.unlock();
}
}
int main() {
std::thread t1(incrementResource);
std::thread t2(incrementResource);
t1.join();
t2.join();
std::cout << "The value of sharedResource is: " << sharedResource << std::endl;
return 0;
}
```
在这个例子中,两个线程`t1`和`t2`都试图增加`sharedResource`的值。为了防止数据竞争,每个线程在操作之前使用`mtx.lock()`获取锁,并在完成后使用`mtx.unlock()`释放锁。这保证了在任何时刻只有一个线程能够修改`sharedResource`。
### 3.2.2 其他锁类型:recursive_mutex, timed_mutex等
在C++11中,除了基本的`std::mutex`之外,标准库还提供了其他几种不同的锁类型,以适应不同场景的需求。
- `std::recursive_mutex`:这是互斥锁的变体,允许同一个线程多次锁定同一个互斥锁。这对于那些需要嵌套锁定的场景非常有用,例如,在递归函数中。
- `std::timed_mutex`:这种锁提供了超时机制,允许线程尝试在一定时间内获取锁。如果在指定时间内未能获取锁,则可以返回错误或者继续执行其他操作。这对于避免死锁非常有帮助,因为它允许线程在长时间等待锁时有机会执行其他任务。
- `std::recursive_timed_mutex`:结合了`recursive_mutex`和`timed_mutex`的特点,允许超时机制下的嵌套锁定。
这些不同类型的锁为C++11的并发编程提供了更丰富的同步机制,程序员可以根据具体的需求来选择合适的锁类型。例如,如果你使用的是需要递归调用的库函数,并且这个库函数会锁定互斥锁,则应当使用`std::recursive_mutex`来避免死锁。
```cpp
#include <iostream>
#include <thread>
#include <mutex>
std::recursive_mutex mtx;
int sharedResource = 0;
void recursiveIncrementResource(int depth) {
if (depth > 0) {
recursiveIncrementResource(depth - 1); // 递归调用
}
mtx.lock();
++sharedResource;
mtx.unlock();
}
int main() {
std::thread t(recursiveIncrementResource, 5);
t.join();
std::cout << "The value of sharedResource is: " << sharedResource << std::endl;
return 0;
}
```
在这个例子中,`recursiveIncrementResource`函数中使用了`std::recursive_mutex`来允许嵌套锁定。该函数会递归调用自身`5`次,每次调用都尝试获取锁。使用`std::recursive_mutex`可以防止在递归过程中发生死锁。
### 3.2.3 读写锁:shared_mutex的应用
读写锁(也称为共享-独占锁)是另一种同步机制,用于提高并发执行的效率。对于读多写少的场景,使用读写锁可以显著提高性能,因为它允许多个读线程同时访问资源,但写入操作时则要求独占访问。
C++17标准中引入了`std::shared_mutex`,用于实现读写锁。其主要接口如下:
- `lock_shared()`:锁定互斥锁为共享模式,允许多个线程同时获取锁。
- `unlock_shared()`:释放共享锁。
- `lock()`:锁定互斥锁为独占模式,只允许一个线程获取锁。
- `unlock()`:释放独占锁。
使用`std::shared_mutex`时,通常希望读操作尽可能并行,而写操作是独占的。对于写操作,它必须等待所有读操作完成后才能开始;对于读操作,则可以在没有写操作的情况下并行进行。
```cpp
#include <iostream>
#include <thread>
#include <shared_mutex>
#include <vector>
std::shared_mutex mtx;
std::vector<int> data;
void readData() {
while (true) {
mtx.lock_shared();
// 读操作
std::cout << "Data size is " << data.size() << std::endl;
mtx.unlock_shared();
std::this_thread::sleep_for(std::chrono::milliseconds(100));
}
}
void writeData(int newData) {
while (true) {
mtx.lock();
// 写操作
data.push_back(newData);
mtx.unlock();
std::this_thread::sleep_for(std::chrono::milliseconds(500));
}
}
int main() {
std::thread reader(readData);
std::thread writer(writeData, 1);
reader.join();
writer.join();
return 0;
}
```
在这个例子中,`readData`函数和`writeData`函数分别代表读线程和写线程。读操作使用`lock_shared`和`unlock_shared`来保护共享资源,而写操作则使用`lock`和`unlock`。这允许多个读操作并行进行,同时在写操作时独占资源。
## 3.3 线程同步工具
### 3.3.1 条件变量condition_variable的用法
条件变量是C++中实现线程间同步的一种工具,特别适用于当一个线程需要在另一个线程到达某个状态后才继续执行的情况。在C++11中,通过`std::condition_variable`提供了这一机制。
条件变量通常与互斥锁一起使用,以确保在多个线程间同步状态的改变。一个线程在某个条件不满足时可以等待(阻塞),直到另一个线程改变了条件并通知条件变量。
主要的接口有:
- `wait()`: 使得线程在条件变量上等待,直到被唤醒。
- `notify_one()`: 唤醒一个等待条件变量的线程。
- `notify_all()`: 唤醒所有等待条件变量的线程。
```cpp
#include <iostream>
#include <thread>
#include <mutex>
#include <condition_variable>
std::mutex mtx;
std::condition_variable cv;
bool ready = false;
void print_id(int id) {
std::unique_lock<std::mutex> lck(mtx);
while (!ready) { // 使用条件变量等待状态变为true
cv.wait(lck);
}
// 当被唤醒时,可以确定ready为true
std::cout << "Thread " << id << '\n';
}
void go() {
std::unique_lock<std::mutex> lck(mtx);
ready = true;
cv.notify_all(); // 通知所有线程
}
int main() {
std::thread threads[10];
for (int i = 0; i < 10; ++i)
threads[i] = std::thread(print_id, i);
std::cout << "10 threads ready to race...\n";
go(); // 主线程通知所有线程
for (auto& th : threads)
th.join();
return 0;
}
```
在这个例子中,主线程在设置了`ready`为`true`后,通过`notify_all`通知所有等待的线程。每个线程在`wait`调用时被阻塞,直到条件变量被通知。
### 3.3.2 future和promise的线程间通信
在C++11中,`std::future`和`std::promise`是用于线程间通信的两个关键组件,它们提供了异步返回值和设置返回值的机制。`std::promise`对象可以存储一个值或异常,而`std::future`对象可以通过`get()`方法异步获取这个值。
`std::promise`通常在线程任务中创建,并通过`std::future`返回结果给等待该结果的线程。这个机制非常适合当一个线程需要执行一项任务并返回结果,而另一个线程需要这个结果时使用。
```cpp
#include <future>
#include <iostream>
#include <thread>
int main() {
std::promise<int> prom;
std::future<int> fut = prom.get_future();
std::thread producer([&prom] {
prom.set_value(42); // 设置异步操作的结果
});
std::cout << "Waiting... " << std::flush;
int value = fut.get(); // 获取异步操作的结果
std::cout << "Done!" << '\n';
std::cout << "Value: " << value << '\n';
producer.join();
return 0;
}
```
在这个例子中,`producer`线程计算了一个值,并通过`prom`对象将值传递给`main`线程。`main`线程通过`fut.get()`获取这个值,并输出。这种方式允许线程之间进行有效的数据交互和结果处理。
### 3.3.3 同步块和锁的组合使用技巧
当使用互斥锁、条件变量等同步工具时,合理地组合它们可以大大简化线程间的同步代码并提高效率。一种常见的模式是“保护-等待-通知”模型,这是基于条件变量的常见用法。
保护-等待-通知模型的步骤如下:
1. 使用互斥锁保护共享资源,确保访问是线程安全的。
2. 在条件满足时进行等待操作,在条件不满足时进入等待状态。
3. 使用条件变量通知等待线程条件已改变,并由等待线程重新检查条件。
```cpp
#include <iostream>
#include <thread>
#include <mutex>
#include <condition_variable>
int sharedResource = 0;
std::mutex mtx;
std::condition_variable cv;
void changeResource(int newValue) {
std::unique_lock<std::mutex> lck(mtx);
sharedResource = newValue;
cv.notify_all(); // 通知等待条件变量的线程
}
void watchResource() {
std::unique_lock<std::mutex> lck(mtx);
cv.wait(lck, []{ return sharedResource != 0; }); // 等待条件满足
std::cout << "Resource has changed to " << sharedResource << '\n';
}
int main() {
std::thread t1(watchResource);
std::thread t2(changeResource, 42);
t1.join();
t2.join();
return 0;
}
```
在这个例子中,`changeResource`函数使用互斥锁保护对`sharedResource`的修改,并通过`notify_all`通知所有等待的线程。`watchResource`函数通过条件变量的`wait`方法等待`sharedResource`不等于0,当条件满足时,线程被唤醒并继续执行。
这种方式不仅可以有效地同步线程,而且能够在多线程环境中实现高效的数据处理和任务协调。
# 4. std::unordered_map线程安全的实现
在多线程环境中,数据结构的线程安全是保证程序正确运行的关键。`std::unordered_map` 作为 C++ 标准库中广泛使用的哈希表实现,其线程安全的实现显得尤为重要。本章节将深入探讨如何通过不同的策略来保证 `std::unordered_map` 在并发环境下安全地被访问和修改。
## 4.1 使用互斥锁保证线程安全
互斥锁(Mutex)是一种简单有效的同步机制,可以用来保证在多线程环境下对共享资源的互斥访问。
### 4.1.1 对std::unordered_map操作加锁
当我们需要对 `std::unordered_map` 的操作加锁以保证线程安全时,最基本的做法就是将整个容器用互斥锁包围起来。这样,在任何时刻,只有一个线程能够执行对 `std::unordered_map` 的读写操作。
```cpp
#include <unordered_map>
#include <mutex>
std::unordered_map<int, std::string> my_map;
std::mutex my_map_mutex;
void insert(int key, const std::string& value) {
std::lock_guard<std::mutex> lock(my_map_mutex);
my_map[key] = value;
}
std::string find(int key) {
std::lock_guard<std::mutex> lock(my_map_mutex);
auto it = my_map.find(key);
if (it != my_map.end()) {
return it->second;
}
return "not found";
}
```
在上述代码中,我们使用了 `std::lock_guard` 对象,它在构造时自动加锁,在析构时自动解锁,保证了异常安全。
### 4.1.2 读写分离策略
在多线程读写同一个 `std::unordered_map` 时,读操作和写操作之间也需要互斥。然而,这种严格的互斥锁会导致读写操作串行执行,降低了程序的并行性。因此,读写锁(例如 `std::shared_mutex`)被引入以提供更灵活的锁策略。
```cpp
#include <unordered_map>
#include <shared_mutex>
std::unordered_map<int, std::string> my_map;
std::shared_mutex my_map_mutex;
void insert(int key, const std::string& value) {
std::unique_lock<std::shared_mutex> write_lock(my_map_mutex);
my_map[key] = value;
}
std::string find(int key) {
std::shared_lock<std::shared_mutex> read_lock(my_map_mutex);
auto it = my_map.find(key);
if (it != my_map.end()) {
return it->second;
}
return "not found";
}
```
在本示例中,`std::shared_mutex` 用于同时允许多个读操作并行执行,但写操作会独占锁,确保写入操作的原子性。
## 4.2 基于原子操作的无锁编程
无锁编程是一种高级并发技术,利用原子操作(atomic operations)来避免传统的锁机制,从而提高性能。
### 4.2.1 原子操作与std::unordered_map结合
尽管 `std::unordered_map` 本身不支持原子操作,但我们可以使用 `std::atomic` 来包装其内部使用的类型,或用锁自由的数据结构,如无锁哈希表。
```cpp
#include <unordered_map>
#include <atomic>
#include <string>
std::unordered_map<int, std::atomic<std::string>> my_atomic_map;
void insert(int key, const std::string& value) {
my_atomic_map[key] = value;
}
std::string find(int key) {
if (auto it = my_atomic_map.find(key); it != my_atomic_map.end()) {
return it->second.load();
}
return "not found";
}
```
上述代码演示了使用 `std::atomic` 来包装 `std::string` 类型,并利用原子操作来确保在多线程中的安全赋值和读取。
### 4.2.2 无锁数据结构的设计原则
设计无锁数据结构需要遵循特定原则,比如无等待(wait-free)和无锁(lock-free)的概念。这些原则确保了算法的执行不会因为等待锁而阻塞。
无锁数据结构设计的一个重要方面是避免ABA问题,ABA问题出现在多线程环境中,当指针(或值)在被读取后,被修改回原值,但是中间状态被修改多次,导致看似无变化但实际上数据已经发生了变化。
为了处理ABA问题,通常需要引入“标记”(tag),例如使用 `std::atomic<node*>` 而不是单纯的 `std::atomic<node*>`。此外,无锁数据结构的设计和实现非常复杂,通常需要深入理解底层的硬件和并发模型。
## 4.3 高级并发控制结构
高级并发控制结构包括无锁数据结构和基于锁自由原则的数据结构,它们旨在提高并发效率。
### 4.3.1 lock-free和wait-free队列的使用
lock-free 和 wait-free 是无锁数据结构的两种设计哲学。Lock-free 意味着至少有一个线程总是在进行操作,而 wait-free 指的是所有线程都可以在没有延迟的情况下完成操作。
在C++中,我们可以使用标准库中或第三方库提供的 lock-free 和 wait-free 队列。例如,`std::atomic` 提供了 atomic_flag,可以作为构建无锁数据结构的基础。更复杂的lock-free结构,如 Michael-Scott非阻塞队列,可以用于管理任务或数据的并发处理。
### 4.3.2 并发哈希表的原理与实践
并发哈希表是并发数据结构中的一个常见例子,其核心目标是允许多个线程并行地进行读写操作。实现这样的数据结构需要平衡原子操作的开销和数据结构的可扩展性。
以下是一个简化的并发哈希表的实现示例:
```cpp
#include <unordered_map>
#include <shared_mutex>
#include <memory>
template<typename Key, typename Value>
class ConcurrentHashMap {
private:
struct Bucket {
std::unordered_map<Key, Value> map;
mutable std::shared_mutex mutex;
};
std::vector<Bucket> buckets;
public:
void insert(const Key& key, const Value& value) {
auto& bucket = buckets[std::hash<Key>()(key) % buckets.size()];
std::unique_lock<std::shared_mutex> lock(bucket.mutex);
bucket.map.insert({key, value});
}
Value find(const Key& key) {
auto& bucket = buckets[std::hash<Key>()(key) % buckets.size()];
std::shared_lock<std::shared_mutex> lock(bucket.mutex);
return bucket.map.at(key);
}
};
```
在这个示例中,`ConcurrentHashMap` 通过将数据分割到多个桶中,并为每个桶分配独立的 `std::shared_mutex` 来实现并发访问。这种分桶策略是设计高性能并发哈希表的关键。
在本章中,我们学习了如何使用互斥锁来保证 `std::unordered_map` 的线程安全,了解了原子操作在无锁编程中的应用,以及高级并发控制结构的设计和实践。理解这些内容对在现代C++中编写高效、稳定、安全的并发程序至关重要。在下一章,我们将进一步探索并发编程的最佳实践和性能优化方法。
# 5. 最佳实践与性能优化
随着并发编程在C++中的广泛应用,开发者面临着提高代码性能和维护线程安全的双重挑战。本章将深入探讨在C++中实现并发最佳实践和性能优化的有效方法。
## 5.1 线程安全的设计模式
在多线程环境中,设计模式的选择至关重要。正确的设计模式能够确保线程安全,同时提高代码的可维护性和可扩展性。
### 5.1.1 线程局部存储的应用
线程局部存储(Thread Local Storage, TLS)是确保线程安全的一种有效手段,它能够为每个线程提供独立的存储空间,使得数据只在各自的线程内部可见。
```cpp
#include <thread>
#include <iostream>
__thread int thread_specific_data; // 使用 __thread 关键字声明线程局部变量
void thread_function() {
thread_specific_data = 10; // 线程独立地设置变量
std::cout << "Value in thread: " << thread_specific_data << std::endl;
}
int main() {
std::thread t1(thread_function);
std::thread t2(thread_function);
t1.join();
t2.join();
return 0;
}
```
在上面的代码示例中,`thread_specific_data`变量被声明为线程局部存储,每个线程都有自己的`thread_specific_data`副本,从而避免了竞争条件和线程安全问题。
### 5.1.2 单例模式与并发
单例模式确保一个类只有一个实例,并提供全局访问点。然而,在多线程环境中实现线程安全的单例模式需要特别注意。懒汉式单例在C++中的线程安全实现通常会依赖于互斥锁。
```cpp
#include <iostream>
#include <mutex>
class Singleton {
private:
static Singleton* instance;
static std::mutex mtx; // 互斥锁
Singleton() = default; // 私有构造函数
~Singleton() = default;
Singleton(const Singleton&) = delete; // 阻止拷贝构造
Singleton& operator=(const Singleton&) = delete; // 阻止拷贝赋值
public:
static Singleton* getInstance() {
if (instance == nullptr) {
std::lock_guard<std::mutex> lock(mtx); // 使用lock_guard自动管理锁
if (instance == nullptr) {
instance = new Singleton();
}
}
return instance;
}
};
Singleton* Singleton::instance = nullptr;
std::mutex Singleton::mtx;
int main() {
auto* singleton = Singleton::getInstance();
// 使用 singleton 进行其他操作
return 0;
}
```
通过使用`std::lock_guard`,代码在创建实例之前确保了线程安全。注意,在`getInstance`函数中,需要双重检查锁定(double-checked locking),在确认没有实例后再次检查以避免重复创建实例。
## 5.2 性能评估与调优
性能评估与调优是保证并发应用运行效率的关键环节,开发者需要了解性能测试的方法,并掌握调优的技巧。
### 5.2.1 性能测试方法论
性能测试方法包括压力测试、负载测试、稳定性测试、基准测试等。这要求开发者不仅需要编写测试用例,还要使用专门的测试工具来模拟不同负载下的系统行为。
性能测试工具如`Google Benchmark`可以集成到项目中,帮助开发者进行基准测试。以下是一个使用`Google Benchmark`进行基准测试的简单示例:
```cpp
#include <benchmark/benchmark.h>
static void BM_ScalarAdd(benchmark::State& state) {
while (state.KeepRunning()) {
for (int i = 0; i < 1000; ++i) {
int a = i;
}
}
}
BENCHMARK(BM_ScalarAdd);
int main(int argc, char** argv) {
benchmark::Initialize(&argc, argv);
benchmark::RunSpecifiedBenchmarks();
return 0;
}
```
在上面的代码中,`BM_ScalarAdd`函数被标记为基准测试函数,使用`benchmark::State`来控制测试的迭代次数。通过`benchmark::RunSpecifiedBenchmarks`函数来运行所有注册的基准测试。
### 5.2.2 分析工具和调优技巧
性能调优通常涉及多个方面,包括算法优化、内存管理、线程调度、I/O操作等。开发者可以使用分析工具如`Valgrind`、`gprof`或`Intel VTune`来识别瓶颈,并根据分析结果进行调优。
调优技巧通常包括减少锁的粒度、避免不必要的数据复制、使用无锁数据结构等。性能优化往往需要根据具体的应用场景和目标进行定制化的设计。
## 5.3 案例研究:C++并发应用
深入分析实际案例有助于理解并发编程的最佳实践。
### 5.3.1 线程池的实现与优化
线程池是并发编程中常见的组件,它通过维护一个固定大小的工作线程池来管理任务的执行,从而减少线程创建和销毁的开销。
```cpp
#include <vector>
#include <queue>
#include <thread>
#include <mutex>
#include <condition_variable>
#include <functional>
#include <future>
class ThreadPool {
public:
explicit ThreadPool(size_t);
template<class F, class... Args>
auto enqueue(F&& f, Args&&... args)
-> std::future<typename std::result_of<F(Args...)>::type>;
~ThreadPool();
private:
// 线程池任务队列
std::queue<std::function<void()>> tasks;
// 同步机制
std::mutex queue_mutex;
std::condition_variable condition;
bool stop;
// 线程向量
std::vector< std::thread > workers;
};
template<class F, class... Args>
auto ThreadPool::enqueue(F&& f, Args&&... args)
-> std::future<typename std::result_of<F(Args...)>::type> {
using return_type = typename std::result_of<F(Args...)>::type;
auto task = std::make_shared< std::packaged_task<return_type()> >(
std::bind(std::forward<F>(f), std::forward<Args>(args)...)
);
std::future<return_type> res = task->get_future();
{
std::unique_lock<std::mutex> lock(queue_mutex);
if(stop) {
throw std::runtime_error("enqueue on stopped ThreadPool");
}
tasks.emplace([task](){ (*task)(); });
}
condition.notify_one();
return res;
}
// 其他成员函数的实现细节略
```
在上面的线程池实现中,使用了`std::thread`来创建工作线程,并通过条件变量`std::condition_variable`同步线程池的执行。工作线程会等待任务队列中任务的到来,一旦有新任务,它们会被分派到某个线程上执行。
### 5.3.2 高性能网络服务器中的并发编程实例
高性能网络服务器通常需要处理大量的并发连接,这使得它们成为并发编程实践的典型应用。在此类应用中,使用事件驱动模型和非阻塞I/O是常见的设计选择。
例如,使用`epoll`(Linux)或`kqueue`(BSD)这样的I/O多路复用技术,可以让单个线程高效地处理成千上万的并发连接。在C++中,可以借助库如`Boost.Asio`实现这些高级特性。
网络服务器的伪代码可能如下:
```cpp
#include <asio.hpp>
#include <thread>
#include <iostream>
using asio::ip::tcp;
void handle_session(tcp::socket socket) {
// 实现具体的连接处理逻辑
}
void run_server() {
asio::io_context ioc; // 一个上下文可以运行多个socket
tcp::acceptor acceptor(ioc, tcp::endpoint(tcp::v4(), 1234));
while(true) {
tcp::socket socket(ioc);
acceptor.accept(socket);
std::thread(handle_session, std::move(socket)).detach(); // 分离线程,以便立即处理其他连接
}
}
int main() {
run_server();
}
```
在该示例中,服务器使用`asio`库创建了一个TCP监听器,并在新连接到来时创建新的线程来处理连接。通过分离线程(使用`.detach()`),每个连接都可以并行处理,而不会阻塞服务器的主线程。
总结起来,通过精心设计并发控制结构并优化性能测试与分析流程,开发者可以创建出既安全又高效的并发应用程序。不断学习和实践,结合真实的案例分析,是提升并发编程技能的不二法门。
# 6. 并发编程的未来趋势
随着计算需求的增长和多核处理器的普及,现代软件开发中并发编程已经成为了一项关键技术。随着标准和工具的发展,程序员现在有了更多先进的工具和策略来应对并发编程所带来的挑战。
## 6.1 C++20及以后的并发特性
C++20引入了许多新的并发特性和库扩展,这些特性不仅提升了语言的表达能力,还在很大程度上简化了并发编程的复杂性。
### 6.1.1 C++20中的并发更新概览
C++20中,标准库新增了诸如`std::jthread`,`std::latch`,`std::barrier`,和`std::semaphore`等工具,它们提供了更为方便的控制并发执行流程的手段。
- **`std::jthread`** 是C++20引入的一种新的线程类,它能够自动加入线程,无需手动调用join函数,并且它能够检测异常,当异常发生时自动清理资源。
- **`std::latch` 和 `std::barrier`** 提供了在多个线程之间同步执行点的能力。`std::latch` 是一次性使用的同步原语,而`std::barrier` 可以重复使用。
- **`std::semaphore`** 类似于操作系统中的信号量,适用于实现复杂的线程同步和互斥。
此外,C++20还对`<atomic>`头文件做了增强,提供了`std::atomic_ref`等新类型,允许对非原子对象施加原子操作。这些改进使得在不改变数据结构的情况下,更容易保证数据的线程安全性。
### 6.1.2 新特性在std::unordered_map中的应用
`std::unordered_map` 作为一个非常常用的非线程安全的容器,其C++20版本中的并发支持变得尤为重要。C++20通过引入并行算法,使得对`std::unordered_map`的非修改性操作,如查找和读取,可以在多核处理器上并行执行,提高了程序的性能。
例如,下面的代码展示了如何使用并行的`std::transform`对`std::unordered_map`中的值进行处理:
```cpp
#include <unordered_map>
#include <algorithm>
#include <execution>
std::unordered_map<int, double> data = {{1, 10.0}, {2, 20.0}, {3, 30.0}};
std::unordered_map<int, double> result;
// 并行转换 std::unordered_map
std::transform(std::execution::par_unseq, data.begin(), data.end(),
std::inserter(result, result.end()),
[](const std::pair<int, double>& kv) {
return std::make_pair(kv.first, kv.second * 2.0);
});
// result 现在包含 {1, 20.0}, {2, 40.0}, {3, 60.0}
```
在这个例子中,使用了并行策略`std::execution::par_unseq`来指示编译器对`std::transform`算法进行并行化处理。
## 6.2 跨平台并发解决方案
开发者面临的另一个挑战是如何在不同的平台和操作系统上创建可移植的并发代码。跨平台解决方案允许开发者编写一次代码,即可在多个平台上运行。
### 6.2.1 标准化并发库的优势
标准化的并发库,如C++中的`<thread>`, `<mutex>`, `<barrier>`等,提供了平台无关的并发编程接口。这些库是经过精心设计的,以确保它们在不同操作系统上的一致性和性能。它们解决了不同平台API之间兼容性问题,简化了跨平台开发的复杂性。
开发者可以利用这些标准化库来构建适应不同硬件和操作系统的程序,而无需担心底层细节。这不仅降低了开发成本,也减少了因平台特定问题导致的bug。
### 6.2.2 与操作系统特定API的对比
虽然标准化库为开发者提供了极大的便利,但某些情况下直接使用操作系统的特定API可能会带来更好的性能。例如,Linux平台上的futex系统调用提供了更为高效的锁机制,而Windows平台上的WaitOnAddress和WakeByAddressAll等API在某些场景下也能提供性能上的优势。
因此,开发者在选择使用标准化并发库还是平台特定API时,需要根据应用场景、性能需求和资源限制来决定。
## 6.3 并发编程的学习资源和社区
掌握并发编程需要不断学习和实践,这个过程中有许多资源可以帮助我们。
### 6.3.1 推荐的书籍、文档和在线资源
- **书籍**:《C++ Concurrency in Action》、《The Art of Multiprocessor Programming》和《Effective Modern C++》是学习并发编程非常推荐的书籍。
- **在线资源**:***提供了C++标准库的详细文档,包括并发库的使用示例。YouTube和一些在线教育平台如Pluralsight也有相关的教程视频。
- **官方文档**:C++标准委员会发布的C++语言和库的最新草案和标准文档是获取最新知识的重要资源。
### 6.3.2 社区论坛和讨论组的经验分享
社区***组是获取实际经验分享和解决实际问题的宝库。
- **Stack Overflow** 是一个拥有大量C++和并发编程问题和答案的论坛。
- **Reddit** 上的r/cpp社区经常有并发编程的讨论。
- *** 的讨论区**提供了对标准库特性的深入讨论。
在这些平台上,开发者不仅能够找到问题的答案,还能了解到行业内的最佳实践和新兴技术的讨论。
总结来说,随着并发编程的发展,开发者需要持续学习并掌握新技术。借助标准化的并发库和跨平台解决方案,可以在简化开发流程的同时保持高效和可移植性。通过丰富的学习资源和活跃的社区,我们可以在并发编程的道路上越走越远。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 C++ 标准库中的 std::unordered_map 哈希表,提供了一系列文章,全面涵盖了其性能优化、内存管理、并发编程、最佳实践、调试和扩展等各个方面。通过深入的分析和实践指南,专栏旨在帮助开发人员充分利用 std::unordered_map 的强大功能,提高代码性能、减少内存消耗,并确保并发操作的安全性。从自定义哈希函数到调整负载因子,再到管理内存分配和回收,专栏提供了全面的见解,使开发人员能够充分发挥 std::unordered_map 的潜力,构建高效、可靠的 C++ 应用程序。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【C#编程技巧】:***自定义视图引擎数据绑定机制的深入剖析
# 1. 自定义视图引擎数据绑定机制概述
在现代Web开发中,视图引擎是负责将数据模型转换为HTML页面的关键组件。数据绑定机制作为视图引擎的核心,负责数据与视图之间的同步与交互。本章节将概括自定义视图引擎中数据绑定的原理和实践意义。
数据绑定允许开发者将业务逻辑与用户界面分离,通过定义明确的绑定规则来自动更新界面元素。这种分离不仅提高了代码的可维护性,还增强了应用的扩展性与灵活性。
本章接下来将介绍自定义视图引擎数据绑定的基础理论,并为读者
C#自定义验证与数据注解对决:选择最佳验证策略
# 1. C#中的数据验证概述
数据验证是确保数据准确性和完整性的关键步骤。在C#中,数据验证通常在数据进入系统之前进行,以确保数据格式正确,并符合应用的业务逻辑。有效的数据验证能够预防错误的数据输入,并提高应用程序的可靠性。
## 数据验证的重要性
数据验证不仅是为了满足前端界面的用户体验,更重要的是为了保障应用程序的健壮性。通过验证可以防止注入攻击、数据损坏和不一致等问题,从而维护系统的稳定运行。
## C#中验证数据的方法
在C#
Java CDI安全性考量:保证依赖注入安全性的5大策略
# 1. Java CDI基础与安全挑战
Java Contexts and Dependency Injection (CDI) 提供了一个强大的框架,用于在Java应用中实现依赖注入和上下文管理。虽然它简化了组件的装配和生命周期管理,但随着应用变得更加复杂和多样化,安全问题逐渐浮现。
## 1.1 依赖注入的安全性必要性
依赖注入机制允许代码更加模块化和松耦合,但也可能引入安全风险。攻击者可能会利用不当的注入导致数据
C++ unordered_set的遍历优化
# 1. C++ unordered_set概述与性能基础
在现代C++开发中,`unordered_set`是一个广泛使用的容器,它提供了基于哈希表的无序元素集合,拥有平均常数时间复杂度的查找、插入和删除操作。本章将介绍`unordered_set`的基本概念,并概述其性能特点,为深入理解其内部机制和性能优化打下基础。
##
【C++迭代器使用】:std::unordered_map迭代器失效问题的应对策略
# 1. C++迭代器与std::unordered_map基础
C++中的迭代器是一种通用的概念,它提供了一种方法来访问容器中的元素,而无需了解容器的内部结构。迭代器在C++标准库中无处不在,是算法和容器之间的重要桥梁。在本章节,我们将介绍迭代器的基本概念,并深入了解std::unordered_map容器,了解其如何高效地管理键值对集合。
## 1.1 迭代器的基本概
Go语言API设计:Swagger的全方位文档生成能力

# 1. Go语言API设计的基础知识
随着软件开发的持续演进,Go语言以其简洁、高效的特点在构建API方面获得了广泛的关注。一个良好的API设计不仅关乎开发者的使用体验,更影响到整个软件生态系统的健康发展。在本章中,我们
【Go错误处理模式深入】:错误处理的函数式编程方法,优化性能影响
# 1. Go语言中的错误处理基础
Go语言以其简洁明了的语法和高效的并发处理机制赢得了众多开发者的青睐。然而,对于Go中的错误处理,许多初学者可能会觉得有些困惑。本章节将为读者提供一个关于Go语言错误处理的基础介绍,包括错误的定义、错误处理的常见模式以及如何在代码中正确地使用这些模式。
## 1.1 错误的定义和类型
在Go语言中,错误被定义为实现了`erro
【功能扩展】:使用IIS URL重写模块增强***自定义路由能力
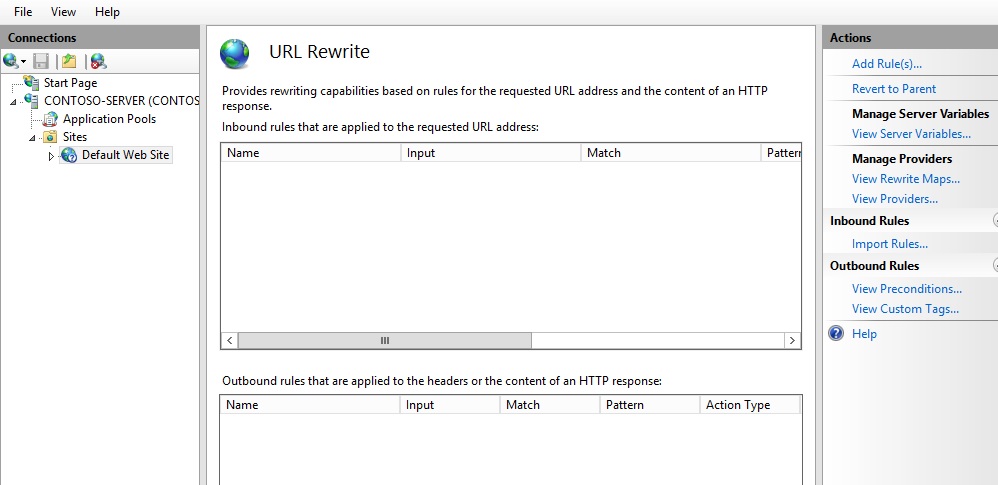
# 1. IIS URL重写模块基础
在互联网信息日益丰富的今天,合理地组织和展示网页内容变得至关重要。IIS URL重写模块就是为了解决这类问题而存在的。它允许开发者或管理员修改URL请求,使网站的链接结构更加清晰、优化搜索引擎优化(SEO)效果,
JUnit 5生命周期回调:掌握测试钩子,优化测试流程
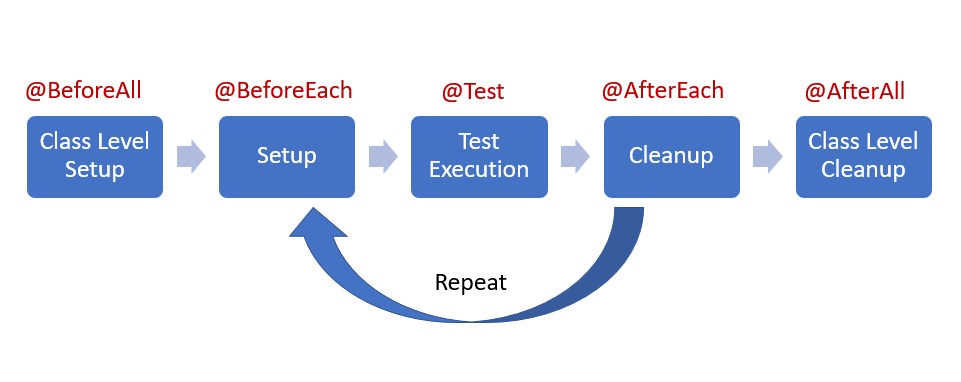
# 1. JUnit 5测试框架概述
JUnit 5是Java单元测试领域中最流行的测试框架,以其强大的功能、灵活性和可扩展性在开发者社区中享有盛誉。作为JUnit 5的使用者和贡献者,理解其核心概念对于编写高效、可维护的测试代码至关重要。本章将为读者提供JUnit 5的概览,旨在搭建起进入JUnit 5更深层次学习的基础。
JUnit 5相较于其前身JUnit 4,
【性能优化】:优先队列提升算法效率的5大策略
# 1. 优先队列算法效率的重要性
优先队列作为一种支持快速访问最大元素或最小元素的数据结构,在许多算法中扮演着关键角色。在实际应用中,如任务调度、系统事件处理、数据压缩算法等领域,优先队列的效率直接影响了整体系统的性能。
## 1.1 时间复杂度的优化
在算法设计中,时间复杂度是一个重要的衡量标准,它决定了算法处理数据的速度。优先队列的优化主要关注于减少元素插入、
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )