利用OpenCV实现图像边缘检测
发布时间: 2023-12-11 14:58:25 阅读量: 65 订阅数: 25 

python opencv实现图像边缘检测
# 1. 引言
图像边缘检测在计算机视觉和图像处理领域具有重要意义,它能够帮助我们识别图像中的边缘和轮廓,为目标检测、物体识别以及图像分割等任务打下基础。而OpenCV作为一个开源计算机视觉库,提供了丰富的图像处理和边缘检测方法,因此成为了图像边缘检测的理想选择。
## 2. 基本原理
图像边缘检测是计算机视觉和图像处理领域中的一个基础任务。它的目标是在图像中准确地找到物体的边缘或轮廓,以便进行后续的分析和处理。边缘是图像中颜色、亮度或纹理等特征发生明显变化的地方,通常表示物体间的边界或物体内部的边界。
### 2.1 Sobel算子
Sobel算子是一种基于差分的边缘检测算法,它通过计算图像在水平和垂直方向上的梯度来检测边缘。具体而言,Sobel算子将每个像素点与周围的像素进行卷积操作,得到水平方向上的梯度和垂直方向上的梯度,进而计算每个像素的梯度幅值和方向。
Sobel算子的工作流程如下:
1. 将图像转换为灰度图像,以便于处理。
2. 分别应用水平和垂直方向上的Sobel核进行卷积操作,得到水平和垂直方向上的梯度。
3. 计算每个像素的梯度幅值和方向。
4. 根据设定的阈值,将梯度幅值较大的像素点标记为边缘点。
Sobel算子在边缘检测中常用于边缘定位和边缘增强等任务,其简单的计算和应用效果较好。
### 2.2 Canny算法
Canny算法是一种经典的边缘检测算法,具有较高的准确性和稳健性。Canny算法首先对图像进行高斯滤波,以平滑图像并去除噪声。然后,计算图像的梯度幅值和方向,并根据梯度幅值进行非极大值抑制,以精确定位边缘。最后,通过设定低阈值和高阈值来连接边缘,形成最终的边缘图像。
Canny算法的工作流程如下:
1. 将图像转换为灰度图像。
2. 对灰度图像进行高斯滤波,以平滑图像并去除噪声。
3. 计算图像的梯度幅值和方向。
4. 对梯度幅值进行非极大值抑制,以精确定位边缘。
5. 设定低阈值和高阈值,并根据阈值进行边缘连接。
6. 根据设定阈值的大小,得到最终的边缘图像。
Canny算法在图像边缘检测中被广泛应用,能够有效地检测出图像中的边缘,同时具有较低的错误检测率和较高的定位精度。
### 3. 使用OpenCV进行边缘检测
在本章中,我们将指导读者安装OpenCV库并配置开发环境,介绍OpenCV的基本函数和方法,以及提供示例代码和解释,展示如何使用OpenCV实现图像边缘检测。
#### 3.1 安装OpenCV库和配置开发环境
首先,我们需要安装OpenCV库。对于Python用户,可以使用pip来安装OpenCV:
```python
pip install opencv-python
```
对于Java用户,可以在项目中添加OpenCV库的依赖项,例如使用Maven:
```xml
<dependency>
<groupId>org.openpnp</groupId>
<artifactId>opencv</artifactId>
<version>4.1.1-1</version>
</dependency>
```
对于其他语言的开发者,也可以根据相应的包管理工具来安装OpenCV库。
安装完成后,我们需要配置开发环境,确保可以正确引入OpenCV库。
#### 3.2 OpenCV的基本函数和方法
OpenCV提供了丰富的函数和方法,用于图像边缘检测。以下是一些常用的函数和方法:
- `cv2.Canny()`: Canny边缘检测算法
- `cv2.Sobel()`: Sobel算子
- `cv2.Laplacian()`: Laplacian算子
- `cv2.findContours()`: 查找图像的轮廓
#### 3.3 示例代码
接下来,让我们通过示例代码展示如何使用OpenCV实现图像边缘检测:
```python
import cv2
import numpy as np
# 读取图像
img = cv2.imread('image.jpg', 0)
# 使用Sobel算子进行边缘检测
sobelx = cv2.Sobel(img, cv2.CV_64F, 1, 0, ksize=5)
sobely = cv2.Sobel(img, cv2.CV_64F, 0, 1, ksize=5)
sobel = cv2.magnitude(sobelx, sobely)
# 显示边缘检测结果
cv2.imshow('Original', img)
cv2.imshow('Sobel', sobel)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
在上面的示例中,我们使用了Sobel算子对图像进行边缘检测,并展示了原始图像和边缘检测结果。
通过上述示例,读者可以初步了解如何使用OpenCV进行图像边缘检测,并可以根据实际需求进行进一步的学习和应用。
这里只是一个简单的示例,实际的图像边缘检测可能涉及到更多的参数调整和处理步骤。
### 4. 边缘检测技术的优化和改进
图像边缘检测虽然在原理上很成熟,但在实际应用中仍然面临一些挑战,例如速度和准确性。在本节中,我们将探索如何优化边缘检测算法,并介绍一些基于OpenCV的工具和技术,以提高边缘检测的效果。
#### 4.1 优化算法速度
在实际应用中,图像边缘检测算法的速度常常是一个关键问题。OpenCV提供了一些优化技术,可以帮助提高边缘检测的速度。
#### 4.2 优化算法准确性
除了速度外,边缘检测的准确性也是一个重要的考量因素。我们将介绍如何通过图像预处理和参数调整,来提高边缘检测算法的准确性,并结合实际案例进行演示。
#### 4.3 使用OpenCV进行边缘检测的优化示例
通过实际示例,我们将演示如何在OpenCV中应用优化技术,以提高图像边缘检测的效果,并深入探讨各种优化方法的具体实现细节。
### 5. 实际应用案例
图像边缘检测在许多实际应用场景中发挥着重要作用,包括图像识别、目标跟踪和辅助驾驶等领域。本节将详细描述如何使用OpenCV实现并优化图像边缘检测,以解决实际问题。
#### 5.1 图像识别
在图像识别领域,图像边缘检测可以帮助识别物体的轮廓和形状,进而实现对象识别和分类。结合OpenCV提供的边缘检测函数,可以构建图像识别系统并进行优化,以提高识别的准确性和效率。
```python
# 示例代码
import cv2
import numpy as np
img = cv2.imread('object.jpg', 0)
edges = cv2.Canny(img, 100, 200)
cv2.imshow('Image', img)
cv2.imshow('Edges', edges)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
在上述示例中,我们使用OpenCV的Canny算法实现了图像边缘检测,并展示了原始图像和边缘检测结果。通过对边缘进行识别和处理,可以为图像识别系统提供更多的特征信息,从而改善识别效果。
#### 5.2 目标跟踪
在目标跟踪应用中,图像边缘检测可用于检测和跟踪目标的运动轮廓,为目标识别和跟踪提供重要信息。通过结合OpenCV的边缘检测函数和目标跟踪算法,可以实现对运动目标的准确跟踪和定位。
```python
# 示例代码
import cv2
import numpy as np
cap = cv2.VideoCapture('tracking.mp4')
while True:
ret, frame = cap.read()
if not ret:
break
edges = cv2.Canny(frame, 100, 200)
cv2.imshow('Frame', frame)
cv2.imshow('Edges', edges)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
```
上述示例中,我们使用OpenCV捕获视频流,并应用Canny算法实现实时边缘检测,从而实现对目标运动轮廓的实时跟踪。
#### 5.3 辅助驾驶
在自动驾驶和辅助驾驶系统中,图像边缘检测可以用于识别道路和障碍物的轮廓,提供给车辆感知和决策模块进行处理。通过结合OpenCV的边缘检测算法和车辆控制系统,可以实现对道路信息和障碍物的实时感知和识别,为驾驶系统提供重要的决策依据。
```python
# 示例代码
import cv2
import numpy as np
def detect_edges(frame):
edges = cv2.Canny(frame, 100, 200)
return edges
def process_frame(frame):
edges = detect_edges(frame)
# 进行其他处理...
return processed_frame
cap = cv2.VideoCapture('road.mp4')
while True:
ret, frame = cap.read()
if not ret:
break
processed_frame = process_frame(frame)
cv2.imshow('Processed Frame', processed_frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
```
在以上代码示例中,我们演示了如何使用OpenCV实现实时道路边缘检测,并对检测结果进行进一步的处理,以用于辅助驾驶系统的开发和优化。
### 6. 总结和展望
在本文中,我们深入探讨了图像边缘检测的重要性、基本原理以及如何利用OpenCV进行边缘检测。我们介绍了Sobel算子和Canny算法的工作原理,指导读者如何安装OpenCV库并配置开发环境,以及如何使用OpenCV函数和方法进行图像边缘检测。此外,我们还探讨了边缘检测技术的优化和改进方法,并展示了一些实际应用案例,如图像识别、目标跟踪和辅助驾驶等。
未来,随着人工智能和计算机视觉技术的不断发展,图像边缘检测将会变得更加智能化和高效化。我们可以期待更多基于深度学习和神经网络的边缘检测算法的涌现,同时也会有更多针对特定应用场景的定制化解决方案的出现。对于读者而言,他们可以通过学习相关资源和参考文献,深入了解图像边缘检测的发展趋势,并参与到这一领域的创新和发展中来。
希望本文能够为读者提供全面而深入的图像边缘检测知识,并激发他们对于图像处理领域的兴趣和探索欲望。无论是对于初学者还是有一定经验的开发者而言,图像边缘检测都是一个令人感兴趣且充满挑战的领域,希望读者能够在该领域中获得乐趣并取得进步。
祝愿读者在图像边缘检测的学习和实践中取得成功!
---
在编写本文时,以下资源对本文提供了重要参考:
- Gonzalez, R. C., & Woods, R. E. (2018). Digital Image Processing. Pearson.
- Bradski, G., & Kaehler, A. (2008). Learning OpenCV: Computer vision with the OpenCV library. O'Reilly Media.

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《OpenCV专栏》涵盖了广泛且深入的图像处理技术和算法应用。其包含了从入门指南到深入理解的一系列主题,包括图像处理、滤波技术、边缘检测、图像金字塔和缩放、直方图均衡化、色彩空间转换、图像轮廓检测与分析、特征检测与匹配算法、图像分割与分块处理、形态学图像处理、图像识别与物体检测、基本运动检测与跟踪、Haar级联分类器人脸检测、SVM算法图像识别、图像分割与分析、图像配准与变换、立体视觉与三维重建、运动捕捉与姿态估计、实时视频处理与分析、深度学习图像分类与目标识别等内容。无论是初学者还是专业人士,都能在本专栏中找到适合自己的学习和提升技能的内容。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
Cryosat2数据分析必修课:高级应用与处理流程全解析
# 摘要
CryoSat-2卫星数据分析是进行海洋学、冰川学研究以及环境监测的重要工具。本文首先介绍了CryoSat-2卫星数据的基础知识和预处理方法,包括数据下载、格式解析、数据清洗、质量控制以及基于卫星轨道的动力学校正。随后,文章深入探讨了数据分析的高级技术,如信号处理、地表冰盖变化监测、时间序列分析与趋势预测。最后,本文通过实践应用案例,展示了CryoSat-2数据在海洋学
ADK脚本编写:自动化任务脚本实现与管理的全面指南

# 摘要
ADK脚本是一种广泛应用于自动化任务实现的编程语言,具备强大的核心语法和组件,适用于多种场景下的自动化管理。本文从ADK脚本的基础概览入手,深入解析了其核心语法和组件,特别关注了变量、数据处理以及控制流程等方面。在此基础上,进一步探讨了如何利用ADK脚本实现自动化任务,包括任务调度、文件和目录的管理以及系统资源与环境监控。为了
【Multisim 仿真教程】:3小时精通数字电路设计
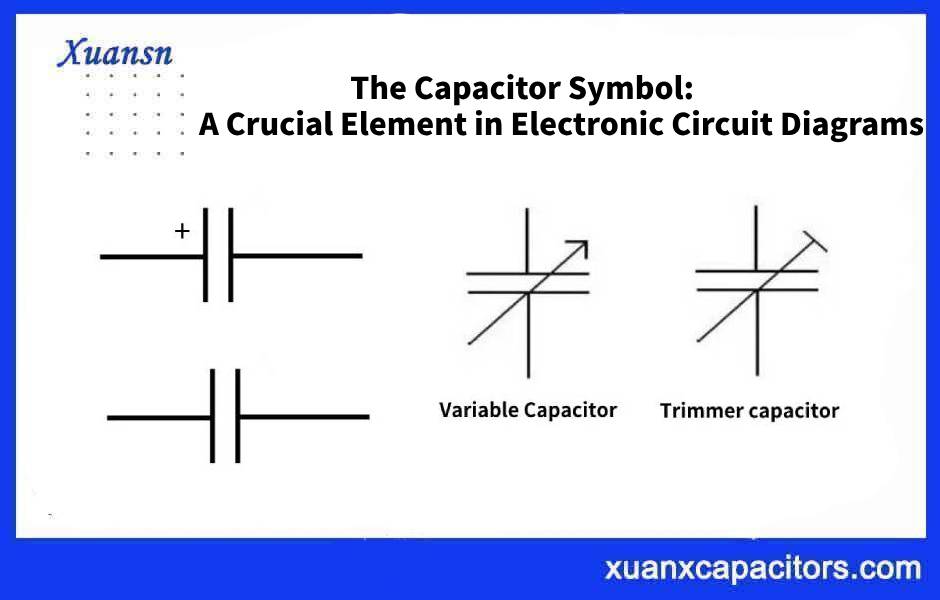
# 摘要
本文全面介绍了Multisim软件的使用,从基础的数字电路设计理论,到实际的仿真操作和高级功能拓展,提供了一个系统的指导。首先,概述了Multisim的安装及基本界面,并介绍了数字电路设计的基础理论,包括逻辑门的类型与功能、逻辑表达式的简化,以及组合逻辑和时序逻辑电路的设计。其次,详细讲解了Multisim的仿真操作,包括界面工具、仿真测试、故障诊断和性能分析的方法。进一步,通过设计实例
VoLTE语音体验升级指南:端到端质量提升实战技巧

# 摘要
VoLTE技术作为第四代移动通信(4G LTE)的重要应用之一,提供了高清语音服务,改善了语音通信质量。本文从多个角度全面分析了VoLTE的关键技术及其优势,包括核心网络的语音质量指标评估和网络优化策略。深入探讨了端到端的VoLTE体验改进策略,重点关注了延迟优化、网络性能测试与评估以及用户设
【TFT-LCD用户体验研究】:亮度调整对用户感知的深远影响
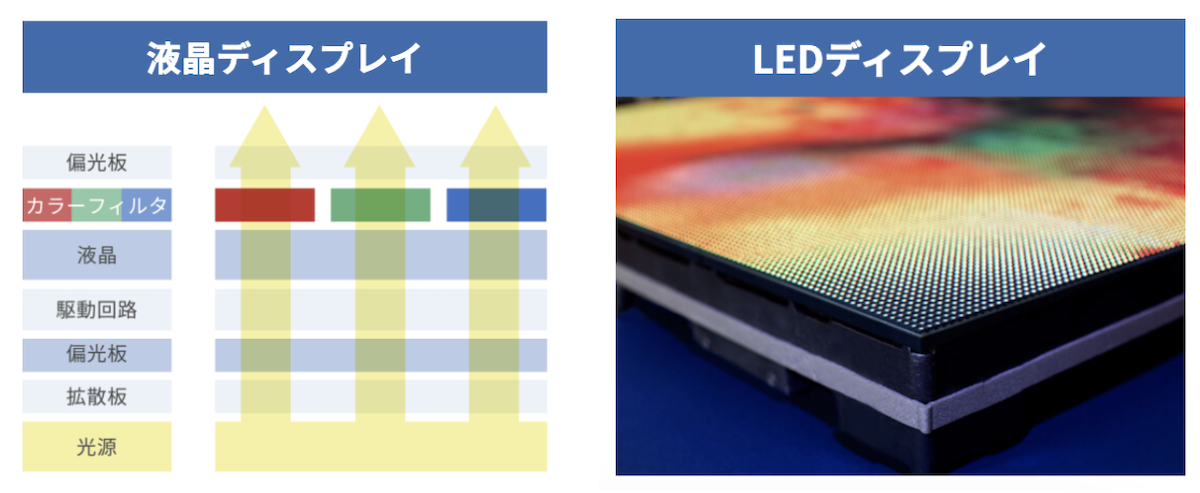
# 摘要
TFT-LCD技术作为当前显示设备的重要组成部分,其亮度调节功能对用户体验至关重要。本文综述了TFT-LCD显示原理及其亮度控制机制,并探讨了用户感知与亮度调整的关系,包括人眼对亮度变化的生理反应和亮度与视觉舒适度的相关性。文章还研究了亮度调整对用户情感和认知负荷的影响,并通过用户研究方法和用户界面设计实践,分析了亮度调整优化对用户满意度的作用。进一步,针对不同年龄
【MFC消息映射机制】:事件处理的10个奥秘与技巧
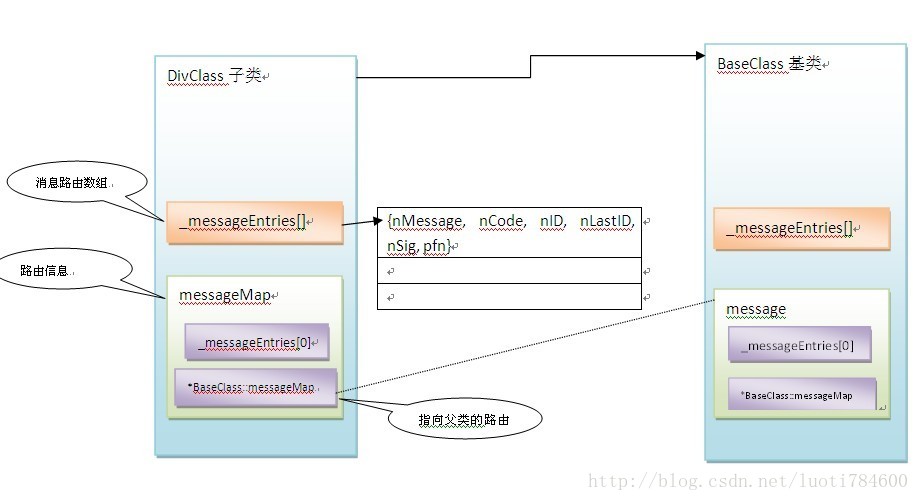
# 摘要
本文深入探讨了MFC(Microsoft Foundation Classes)中的消息映射机制,它是MFC框架的核心部分,负责消息的分发和处理。首先,我们概述了消息
FreeSWITCH呼叫路由与管理:优化策略与最佳实践

# 摘要
本文深入探讨了FreeSWITCH作为一个开源通信平台的核心架构、呼叫路由、呼叫管理功能、高级特性和集成,以及部署和扩展性优化。文章从基础架构入手,详细解析了呼叫路由的配置与管理,包括基础设置、高级策略和性能监控。随后,探讨了FreeSWITCH的呼叫管理功能,包括会话管理、用户
图书馆信息管理系统设计模式应用全集
# 摘要
本文旨在探讨图书馆信息管理系统的开发与优化。首先概述了图书馆信息管理系统的架构及其设计模式基础理论,涉及设计模式的概念、原则以及在系统设计中的应用。随后详细分析了系统功能模块的实现,展示了设计模式如单例、工厂、适配器、组合、策略、状态、装饰、观察者、命令和模板方法模式在管理图书、用户以及借阅流程中的具体运用。最后,通过实践案
Creo二次开发工具箱:Jlink User Guide深度整合与应用
# 摘要
本文详细探讨了Jlink在Creo二次开发中的应用,涵盖了Jlink的角色与作用、基本使用方法、高级功能,以及Creo二次开发的基础知识。文章深入分析了Jlink的安装、配置、操作以及性能分析工具的使用,并结合Creo二次开发的特点,讨论了二次开发的工具、语言和API接口。通过应用实践章节,本文提供了Jlink与Cre
ST7565P屏幕校准与优化全攻略:清晰显示的秘诀

# 摘要
本论文详细介绍了ST7565P屏幕的基础知识、特性和校准理论基础,深入探讨了硬件与软件校准的实践操作,以及校准后屏幕优化和持续改进的策略。通过对校准工具的选择、校准流程的详述和硬件校准的技巧进行具体分析,本研究旨在提升ST7565P屏幕的显示效果和用户体验。进一步,本论文构建了自动化校准系统,分析了校准数据以识别偏差并进行改进,为行业应用提供案例研究,并展望了未来屏幕技术的发展趋势和行业挑战。
# 关键字
ST7565P屏幕;显示原理;色彩校准;亮度控制;自动
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )