用MATLAB可视化三维数据:从点云到复杂曲面,一网打尽
发布时间: 2024-06-17 05:33:04 阅读量: 1028 订阅数: 80 

# 1. MATLAB三维可视化基础
MATLAB 提供了一系列强大的工具,用于创建和可视化三维数据。本章将介绍 MATLAB 三维可视化的基本概念和技术,为后续章节中更高级的可视化技术奠定基础。
MATLAB 中的三维可视化基于矩阵和数组,其中每个元素代表数据点在三维空间中的坐标。通过使用特定的函数和命令,我们可以将这些数据转换为可视化表示形式,例如散点图、表面图和体积渲染。
此外,MATLAB 还提供了交互式可视化功能,允许用户旋转、缩放和探索三维数据,从而获得更深入的见解。
# 2. 点云可视化
点云是一种三维数据结构,由一组无序的点组成,每个点都具有空间坐标和可选的属性信息。点云可用于表示各种形状和物体,例如建筑物、地形和人体。
### 2.1 点云数据的获取和处理
点云数据可以通过各种技术获取,包括激光扫描、结构光和摄影测量。获取的点云数据通常需要进行预处理,以去除噪声、离群点和冗余点。
**代码块 1:点云预处理**
```matlab
% 导入点云数据
pointCloud = pcread('my_point_cloud.ply');
% 去除噪声
denoisedPointCloud = pcdenoise(pointCloud);
% 去除离群点
outlierPointCloud = pcfindoutliers(denoisedPointCloud);
% 去除冗余点
reducedPointCloud = pcdownsample(outlierPointCloud, 'gridAverage', 0.01);
```
**逻辑分析:**
* `pcread()` 函数导入点云数据。
* `pcdenoise()` 函数使用双边滤波器去除噪声。
* `pcfindoutliers()` 函数使用统计方法识别离群点。
* `pcdownsample()` 函数使用网格平均算法去除冗余点。
### 2.2 点云的可视化技术
有多种技术可用于可视化点云数据,每种技术都有其独特的优点和缺点。
#### 2.2.1 散点图
散点图是最简单的点云可视化技术,它将每个点绘制为一个点。散点图对于显示点云的整体分布很有用,但它可能难以区分重叠的点。
**代码块 2:散点图**
```matlab
% 创建散点图
figure;
pcshow(pointCloud);
xlabel('X');
ylabel('Y');
zlabel('Z');
title('散点图');
```
**参数说明:**
* `pcshow()` 函数创建散点图。
* `xlabel()`, `ylabel()`, `zlabel()` 函数设置坐标轴标签。
* `title()` 函数设置图表的标题。
#### 2.2.2 表面图
表面图通过将点云拟合到曲面上来可视化点云。表面图可以提供点云的更平滑和连续的表示,但它可能隐藏点云的细部信息。
**代码块 3:表面图**
```matlab
% 创建表面图
figure;
pcshow(pointCloud, 'Marker', '.', 'MarkerSize', 0.1);
xlabel('X');
ylabel('Y');
zlabel('Z');
title('表面图');
```
**参数说明:**
* `Marker` 参数指定点的形状(`.` 表示点)。
* `MarkerSize` 参数指定点的尺寸。
#### 2.2.3 体素图
体素图将点云划分为三维网格,并计算每个体素中点的数量。体素图可以提供点云的体积表示,但它可能难以区分相邻体素中的点。
**代码块 4:体素图**
```matlab
% 创建体素图
voxelSize = 0.01;
[voxelGrid,
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了在 MATLAB 中绘制三维曲面的各个方面。从基础知识到高级技巧,您将掌握绘制令人惊叹的三维曲面的所有步骤。通过一系列循序渐进的指南和示例,您将学习如何从数据中创建曲面、自定义照明和阴影、优化性能以及解决常见问题。此外,专栏还展示了 MATLAB 三维曲面绘制在科学研究、数据分析、医疗成像和金融建模等领域的实际应用。无论您是初学者还是经验丰富的用户,本专栏都将为您提供绘制三维曲面的全面指南,帮助您将数据转化为引人入胜且有洞察力的可视化效果。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【材料选择专家指南】:如何用最低成本升级漫步者R1000TC北美版音箱
# 摘要
本文旨在深入探讨漫步者R1000TC北美版音箱的升级理论与实践操作指南。首先分析了音箱升级的重要性、音质构成要素,以及如何评估升级对音质的影响。接着介绍了音箱组件工作原理,特别是扬声器单元和分频器的作用及其选择原则。第三章着重于实践操作,提供扬声器单元、分频器和线材的升级步骤与技巧。第四章讨论了升级效果的评估方法,包括使用音频测试软件和主观听感分析。最后,第五章探讨了进阶升级方案,如音频接口和蓝牙模块的扩展,以及个性化定制声音风格的策略。通过本文,读者可以全面了解音箱升级的理论基础、操作技巧以及如何实现个性化的声音定制。
# 关键字
音箱升级;音质提升;扬声器单元;分频器;调音技巧
【PyQt5控件进阶】:日期选择器、列表框和文本编辑器深入使用
# 摘要
PyQt5是一个功能强大的跨平台GUI框架,它提供了丰富的控件用于构建复杂的应用程序。本文从PyQt5的基础回顾和控件概述开始,逐步深入探讨了日期选择器、列表框和文本编辑器等控件的高级应用和技巧。通过对控件属性、方法和信号与槽机制的详细分析,结合具体的实践项目,本文展示了如何实现复杂日期逻辑、动态列表数据管理和高级文本编辑功能。此外,本文还探讨了控件的高级布局和样式设计
MAXHUB后台管理新手速成:界面概览至高级功能,全方位操作教程

# 摘要
MAXHUB后台管理平台作为企业级管理解决方案,为用户提供了一个集成的环境,涵盖了用户界面布局、操作概览、核心管理功能、数据分析与报告,以及高级功能的深度应用。本论文详细介绍了平台的登录、账号管理、系统界面布局和常用工具。进一步探讨了用户与权限管理、内容管理与发布、设备管理与监控的核心功能,以及如何通过数据分析和报告制作提供决策支持。最后,论述了平台的高
深入解析MapSource地图数据管理:存储与检索优化之法
# 摘要
本文对MapSource地图数据管理系统进行了全面的分析与探讨,涵盖了数据存储机制、高效检索技术、数据压缩与缓存策略,以及系统架构设计和安全性考量。通过对地图数据存储原理、格式解析、存储介质选择以及检索算法的比较和优化,本文揭示了提升地图数据管理效率和检索性能的关键技术。同时,文章深入探讨了地图数据压缩与缓存对系统性能的正面影响,以及系统架构在确保数据一致性
【结果与讨论的正确打开方式】:展示发现并分析意义
# 摘要
本文深入探讨了撰写研究论文时结果与讨论的重要性,分析了不同结果呈现技巧对于理解数据和传达研究发现的作用。通过对结果的可视化表达、比较分析以及逻辑结构的组织,本文强调了清晰呈现数据和结论的方法。在讨论部分,提出了如何有效地将讨论与结果相结合、如何拓宽讨论的深度与广度以及如何提炼创新点。文章还对分析方法的科学性、结果分析的深入挖掘以及案例分析的启示进行了评价和解读。最后
药店管理系统全攻略:UML设计到实现的秘籍(含15个实用案例分析)
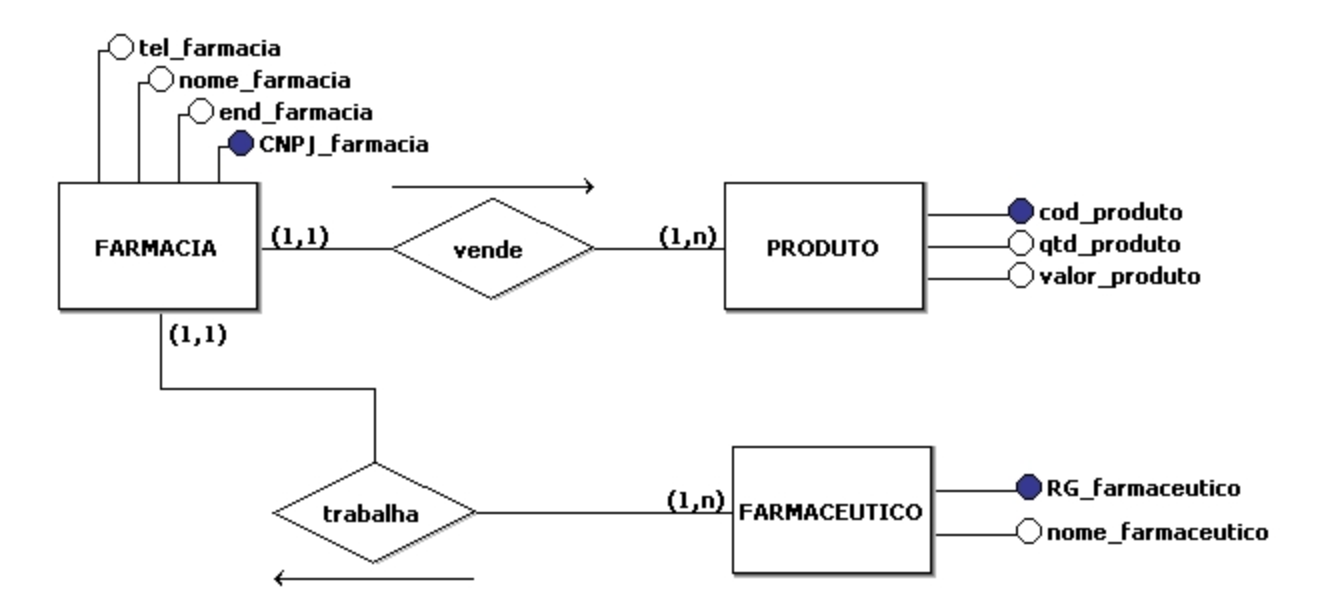
# 摘要
本论文首先概述了药店管理系统的基本结构和功能,接着介绍了UML理论在系统设计中的应用,详细阐述了用例图、类图的设计原则与实践。文章第三章转向系统的开发与实现,涉及开发环境选择、数据库设计、核心功能编码以及系统集成与测试。第四章通过实践案例深入探讨了UML在药店管理系统中的应用,包括序列图、活动图、状态图及组件图的绘制和案例分析。最后,论文对药店管理系统的优化与维护进行了讨论,提
【555定时器全解析】:掌握方波发生器搭建的五大秘籍与实战技巧
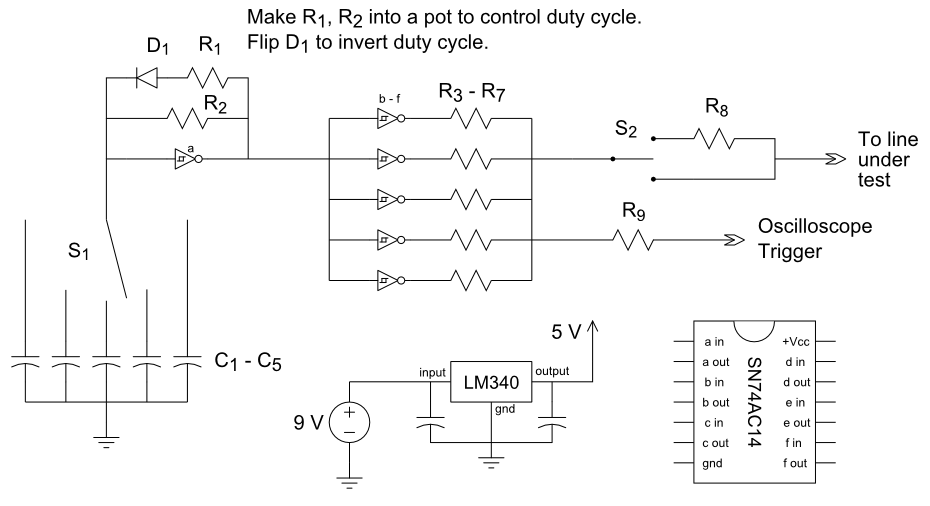
# 摘要
本文详细介绍了555定时器的工作原理、关键参数、电路搭建基础及其在方波发生器、实战应用案例以及高级应用中的具体运用。首先,概述了555定时器的基本功能和工作模式,然后深入探讨了其在方波发生器设计中的应用,包括频率和占空比的控制,以及实际实验技巧。接着,通过多个实战案例,如简易报警器和脉冲发生器的制作,展示了555定时器在日常项目中的多样化运用。最后,分析了555定时器的多用途扩展应用,探讨了其替代技术,
【Allegro Gerber导出深度优化技巧】:提升设计效率与质量的秘诀

# 摘要
本文全面介绍了Allegro Gerber导出技术,阐述了Gerber格式的基础理论,如其历史演化、
Profinet通讯优化:7大策略快速提升1500编码器响应速度
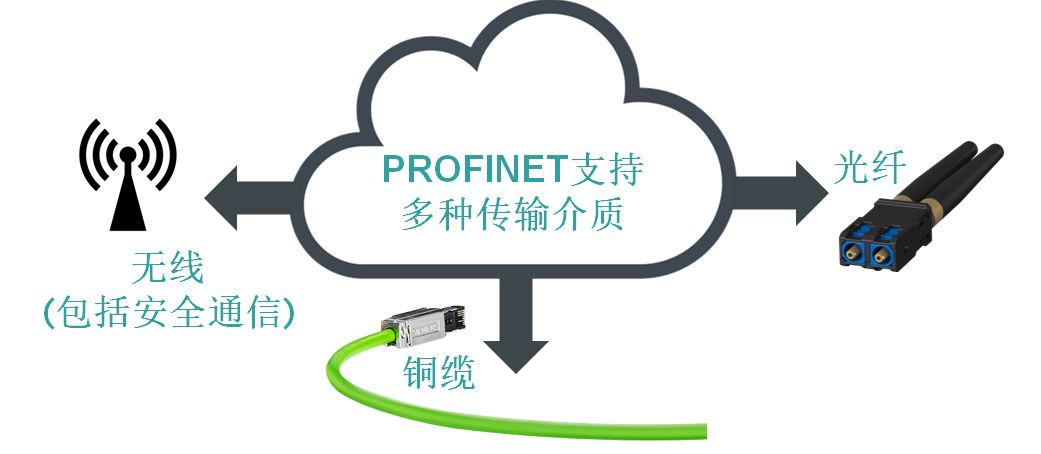
# 摘要
Profinet作为一种工业以太网通讯技术,其通讯性能和编码器的响应速度对工业自动化系统至关重要。本文首先概述了Profinet通讯与编码器响应速度的基础知识,随后深入分析了影响Profinet通讯性能的关键因素,包括网络结构、数据交换模式及编码器配置。通过优化网络和编码器配置,本文提出了一系列提升Profinet通讯性能的实践策略。进一步,本文探讨了利用实时性能监控、网络通讯协议优化以及预
【时间戳转换秘籍】:将S5Time转换为整数的高效算法与陷阱分析
# 摘要
时间戳转换在计算机科学与信息技术领域扮演着重要角色,它涉及到日志分析、系统监控以及跨系统时间同步等多个方面。本文首先介绍了时间戳转换的基本概念和重要性,随后深入探讨了S5Time与整数时间戳的理论基础,包括它们的格式解析、定义以及时间单位对转换算法的影响。本文重点分
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )