线性映射与矩阵秩:哈尔滨工业大学线性代数试题视角
发布时间: 2024-12-26 19:42:58 阅读量: 4 订阅数: 12 

哈尔滨工业大学-线性代数试题及答案.pdf

# 摘要
本文系统探讨了线性代数中的线性映射和矩阵秩的基本概念、理论与计算方法,并对哈尔滨工业大学线性代数试题进行了深入分析。首先介绍线性映射与矩阵秩的基础知识,包括其定义、性质、矩阵表示以及核与像的概念。接着,详细阐述矩阵秩的计算技巧和应用实例,包括行列式方法、初等变换法以及它们在线性方程组解结构和向量空间维数分析中的应用。文章最后一部分对哈尔滨工业大学线性代数试题进行概览和解题策略探讨,尤其关注线性映射与矩阵秩相关题目的解析。通过对线性映射与矩阵秩的深入研究,本文旨在提升学生对线性代数概念的理解和应用能力。
# 关键字
线性映射;矩阵秩;核与像;行列式方法;初等变换法;线性代数试题分析
参考资源链接:[哈工大线性代数试题详解](https://wenku.csdn.net/doc/6ge9oykz9a?spm=1055.2635.3001.10343)
# 1. 线性映射与矩阵秩的基础概念
在本章中,我们将探讨线性代数中两个基础而又至关重要的概念:线性映射与矩阵秩。我们会从线性映射和矩阵秩的定义开始,逐步深入到它们的基本性质和在数学问题中的应用。
## 1.1 线性映射的基本概念
线性映射是线性代数中的一种特殊函数,它满足两个基本性质:加法性和齐次性。简而言之,对于任意两个向量 u 和 v 以及任意实数 c,线性映射 L 满足 L(u + v) = L(u) + L(v) 和 L(cu) = cL(u)。线性映射在数学的各个分支中都有广泛的应用,如在线性方程组、系统动力学、量子力学等领域。
## 1.2 线性映射的核心性质
线性映射的核心性质涉及到了映射的“线性”,这种性质保证了映射的加法和标量乘法运算不变。线性映射允许我们通过矩阵乘法来表示,这在解决实际问题时提供了极大的便利。理解这些性质有助于我们更深入地掌握线性代数,并在解决复杂问题时构建数学模型。
## 1.3 矩阵与线性映射的关系
在数学中,线性映射可以通过矩阵来表示。矩阵的列向量对应于线性映射作用于标准基向量的结果。这种对应关系使得线性映射的计算可以通过矩阵乘法来实现,极大地简化了问题的求解过程。例如,设线性映射 L 对应的矩阵为 A,那么对于任意的列向量 x,我们有 L(x) = Ax。这种表示方法在计算机算法实现时尤为重要,因为矩阵运算有着高效的数值实现方式。
通过以上内容,我们不仅介绍了线性映射和矩阵秩的基本概念,也揭示了它们之间的内在联系。在后续的章节中,我们将进一步探讨这些概念在理论和实践中的应用,并深入分析矩阵秩的相关内容。
# 2. 线性映射的理论与实践
## 2.1 线性映射的定义与性质
### 2.1.1 线性映射的基本概念
在数学中,特别是在线性代数中,线性映射(也称为线性变换)是指从一个向量空间到另一个向量空间的函数,它保持向量加法和标量乘法的运算。换句话说,线性映射是满足以下两个条件的函数:
- 加法性:对于所有的向量 u 和 v,有 T(u + v) = T(u) + T(v)。
- 齐次性:对于所有的标量 c 和向量 v,有 T(c * v) = c * T(v)。
这些属性确保线性映射在图形和代数上都有良好的行为。例如,线性映射可以用来描述旋转、缩放和平移等几何变换。
### 2.1.2 线性映射的核心性质
线性映射的核心性质可以总结如下:
- 保持零向量:T(0) = 0。
- 保持线性组合:如果向量 v1, v2, ..., vn 线性组合的结果是零向量,那么 T(v1), T(v2), ..., T(vn) 的线性组合也必定是零向量。
- 可以表示为矩阵乘法:如果在某个基下,向量 v 的坐标为列向量 x,则 T(v) 的坐标是某个矩阵 A 与 x 的乘积。
- 子空间的保持:如果 W 是 V 的子空间,那么 T(W)(W 在映射 T 下的像)是 T(V)(V 在映射 T 下的像)的子空间。
线性映射在工程、物理和计算机科学等领域的应用非常广泛。它们是处理和分析数据的重要工具,特别是在信号处理、图像处理和机器学习等领域。
## 2.2 线性映射的矩阵表示
### 2.2.1 矩阵与线性映射的关系
每个线性映射都可以通过一个矩阵来表示。具体来说,如果我们有两个向量空间 V 和 W,以及从 V 到 W 的线性映射 T,那么 T 可以用一个矩阵 A 来表示,其中 A 的列是由 T 映射基向量得到的向量组成的。这一关系可以通过矩阵乘法公式来形式化:
设 {v1, v2, ..., vn} 是 V 的一个基,且 {w1, w2, ..., wn} 是 W 的一个基。如果 T 是从 V 到 W 的线性映射,那么对于 V 中的任意向量 v 可以表示为:
v = a1v1 + a2v2 + ... + anvn,
那么 T(v) 在 W 中可以表示为:
T(v) = a1T(v1) + a2T(v2) + ... + anT(vn)。
我们把每个 T(vi) 写成基向量的线性组合:
T(vi) = b1ivi + b2v2i + ... + bmvmi,
于是 T(v) 可以表示成 W 中基向量的线性组合:
T(v) = (a1b11 + a2b12 + ... + anb1n)w1 + (a1b21 + a2b22 + ... + anb2n)w2 + ... + (a1bm1 + a2bm2 + ... + anbmn)wm。
如果我们将这些线性组合的系数写成矩阵的列,则得到一个矩阵 A,它正好描述了映射 T 的作用:
```
| b11 b21 ... bm1 |
| b12 b22 ... bm2 |
| ... ... ... ... |
| b1n b2n ... bmn |
```
这个矩阵 A 称为 T 在给定基下的矩阵表示。
### 2.2.2 矩阵运算对线性映射的作用
矩阵运算,特别是矩阵乘法,与线性映射有着密切的关系。当我们对线性映射 T 的矩阵 A 进行变换时,比如乘以另一个矩阵 B,实际上是在对映射 T 进行组合。
假设我们有两个线性映射 T: V → W 和 S: W → X,它们可以分别用矩阵 A 和 B 来表示。那么映射 S ∘ T(即先进行 T 映射,然后进行 S 映射)可以用矩阵乘法来表示:

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏汇集了哈尔滨工业大学线性代数试题及答案,并提供了深入的解析和应用指导。涵盖了线性代数的各个核心概念,包括矩阵对角化、线性方程组解法、特征值与特征向量计算、行列式计算、线性变换矩阵表示、内积空间解法、抽象向量空间实例、实际问题的线性代数应用、相似矩阵与对角化实践、线性代数学习进阶、基与维度概念探讨、线性映射与矩阵秩、对偶理论应用、线性方程组的几何解等。通过对这些试题的剖析,读者可以掌握线性代数的解题技巧,提升分析和解决问题的能力,深化对线性代数理论的理解。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
工业自动化中的DeviceNet应用:专家详解与案例研究

# 摘要
本论文全面介绍了DeviceNet技术,这是一种专为工业自动化设计的网络解决方案。首先概述了DeviceNet技术及其通信协议的基本概念,随后深入分析了通信模型、网络配置和消息处理等关键领域。重点讨论了DeviceNet在生产线自动化和过程控制中的应用实践,以及设备驱动开发的细节。此外,探讨了DeviceNet所面临的挑战和未来的发展趋势,包括与现代工业通信标准的
单片机PSW寄存器的位操作艺术:从故障排除到性能优化

# 摘要
本文全面介绍PSW寄存器及其在单片机中的基础和高级应用。文章首先概述了PSW寄存器的概念,随后深入探讨了PSW寄存器位操作的原理
企业集成架构指南:U8 EAI接口最佳实践案例分析
# 摘要
企业集成架构(EAI)是现代企业信息系统集成的关键技术,对于提高业务流程效率和降低系统复杂性至关重要。本文从U8 EAI接口的技术基础入手,探讨了其定义、技术原理及其在企业系统集成中的应用。通过分析U8 EAI接口的实现工具和最佳实践案例,本文深入挖掘了成功集成的关键因素和挑战。此外,文章详细论述了U8 EAI接口
【全方位问题解析】:工频信号相位差测量仪制作与调试全攻略
# 摘要
工频信号相位差测量是电力系统和信号分析中的一项基础而关键的技术。本文首先介绍了相位差测量的基础知识,随后详细阐述了测量仪的硬件构建,包括元件选择、电路设计、信号采集与处理模块以及显示界面设计。在此基础上,论文进一步探讨了软件开发与系统集成的重要性,涵盖了软件架构、相位差计算算法、用户界面设计以及软件调试。此外,本文还提出了系统调试与优化的策略,确保性能与稳定性,并通过实际应用案
【软件应用】:用Excel释放线性优化的力量,助你高效决策
# 摘要
本文深入探讨了线性优化基础及其与Excel软件的契合度,阐述了Excel在构建和解决线性优化模型中的广泛应用。从理论基础到具体应用,本文详细讲解了线性优化模型的构建过程,包括设计输入数据表格、建立目标函数和约束条件,并使用Excel求解器进行求解。同时,本文还分析了模型结果,包括如何解读求解器输出以及进行敏感性分析以评估模型的稳健性。通过实践案例分析,如供应链优化、生产计划与调
APV 8.4性能调优必杀技:系统效率翻倍的秘诀

# 摘要
APV 8.4作为先进的性能优化平台,提供了丰富的性能调优工具与策略,旨在提升系统的整体效率与可靠性。本文首先概述了APV 8.4的基本性能调优概念,随后深入探讨了其系统架构、性能监控、负载均衡及故障转移机制。进一步地,本文提供了具体实践技巧,包括网络优化、存储性能调优和内存管理。高级性能调优策略部分介绍了动态资源调度、安全性与性能的平衡以及自动化与智能化调优的方向。最后,通
跨平台部署揭秘:JRE如何在多系统中无缝工作
# 摘要
本文系统地介绍了跨平台部署的基础知识,详细解析了Java运行时环境(JRE)的架构和组成,包括JVM的工作原理、Java类库和运行时数据区。通过阐述JRE的跨平台机制,如Java字节码的概念、系统无关的API设计以及Java平台无关性的实现,为理解其在不同操作系统下的安装、配置及更新提供了清晰的指导。此外,文章还通过应用实例展示了JRE在不同平台上的实际运用,并
【微服务架构全景】:理解其优势与挑战的系统架构设计指南
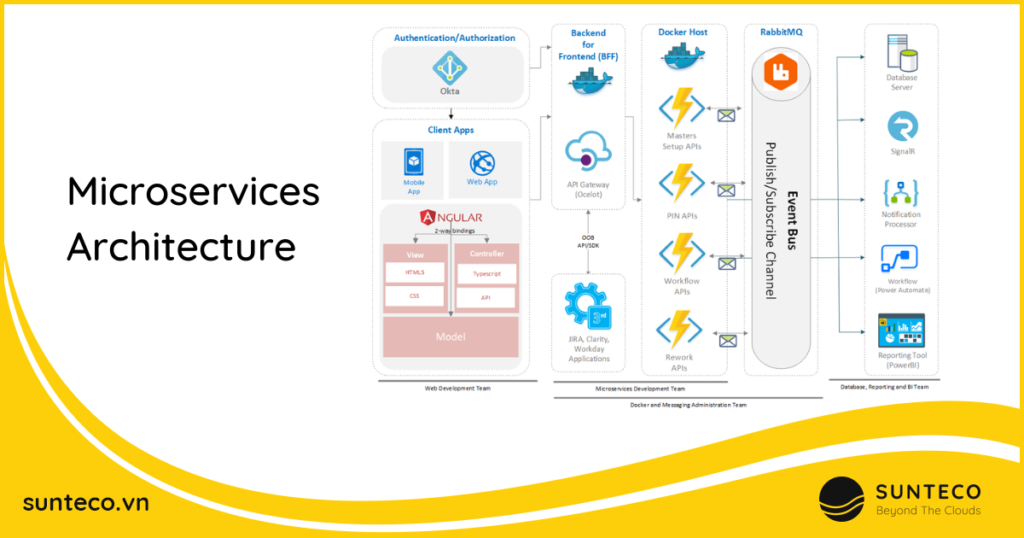
# 摘要
微服务架构作为现代软件开发的一种流行范式,以其组件化、灵活性和可伸缩性的特点吸引了广泛的关注。本文从微服务架构的概念解析入手,详细阐述了设计原则,如单一职责、服务自治和容错,以及通信机制和数据管理策略。文章进一步探讨了技术选型,包括服务框架、容器化、监控和日志管理等方面,并深入分析了安
【高速旋转轴承挑战】:Romax-B5的创新解决方案
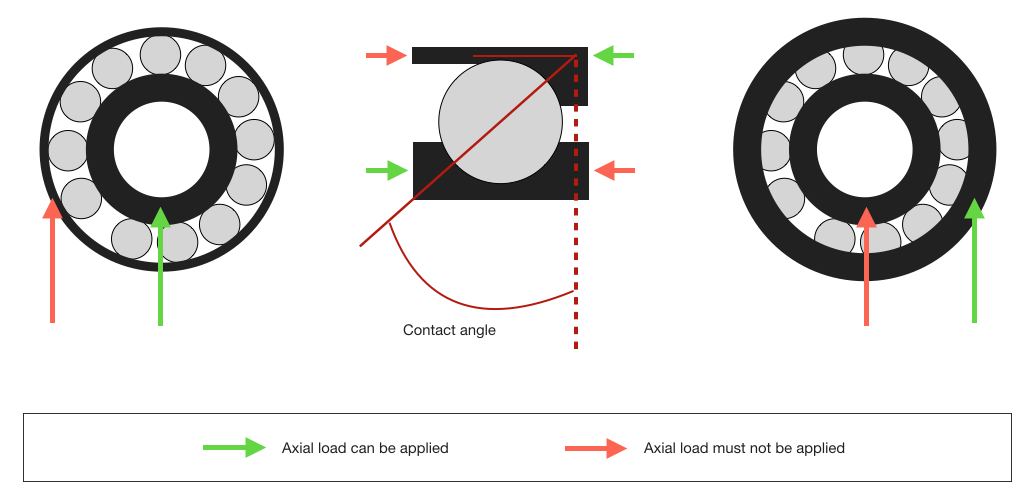
# 摘要
随着工业技术的进步,高速旋转轴承的应用日益广泛,其挑战和现状成为研究的焦点。本文详细介绍了Romax-B5创新解决方案的理论基础、实践应用和技术革新影响。文中首先分析了高速旋转轴承的动力学原理、失效机制以及设计原则,并阐述了Romax-B5的创新理念和技术难点。随后,论述了设计与制造流程
热分析在电子封装设计中的应用:ANSYS Workbench的专家实战技巧
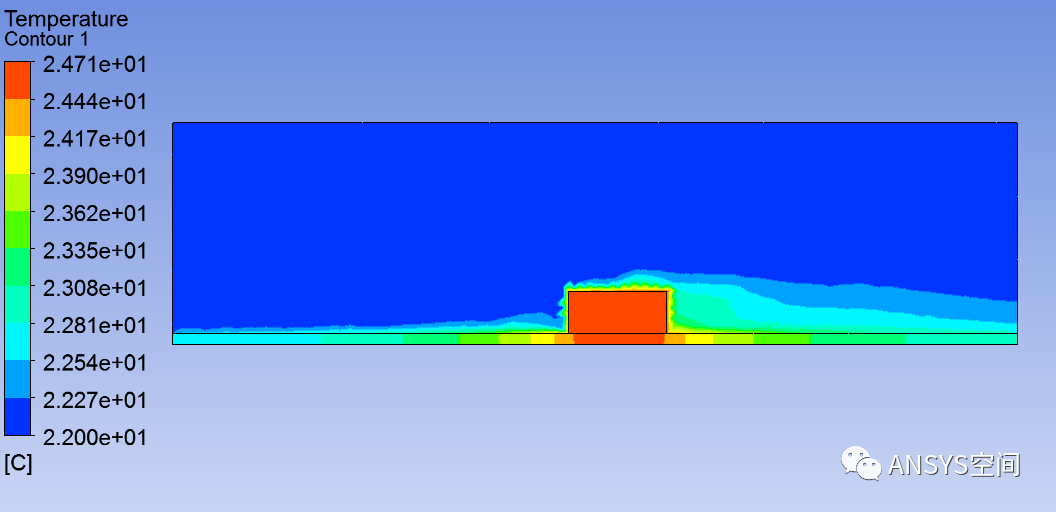
# 摘要
本文全面介绍了热分析在电子封装设计中的基础理论与应用实践。首先概述了热分析的基础知识和电子封装设计的重要性。接着,深入分析了ANSYS Workbench软件的功能及其在热分析模块中的应用。文中详细阐述了电子封装热分析的实战技巧,包括模型创建、边界条件设定、网格划分、求解器选择以及结果分析与优化建议。第四章探讨了热管理策略和电子封装
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )