Yolov5 算法原理解析
发布时间: 2024-05-01 12:20:01 阅读量: 11 订阅数: 23 
# 2.2 YOLOv5算法的架构和原理
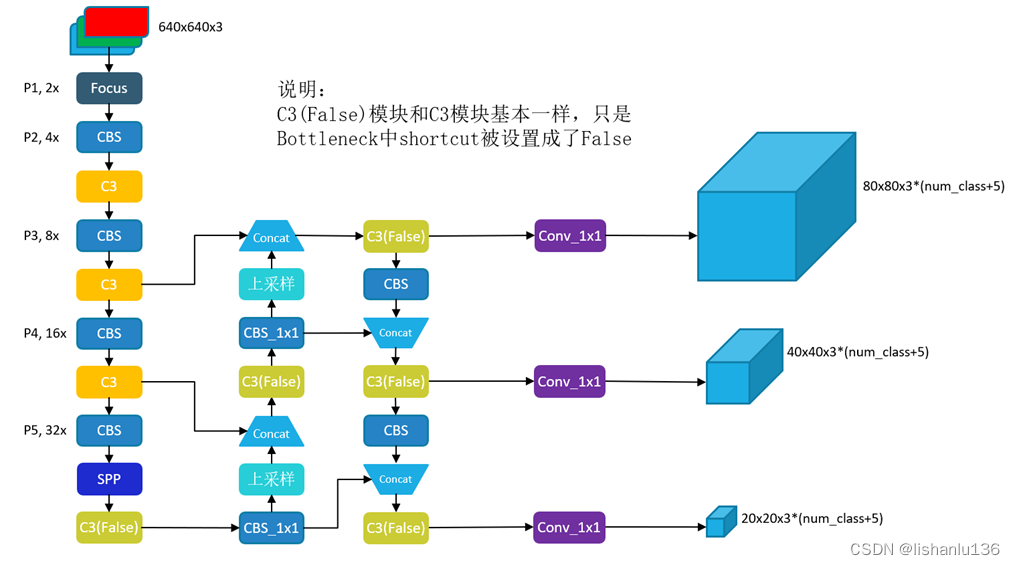
YOLOv5算法的架构主要由三个部分组成:Backbone网络、Neck网络和Head网络。
### 2.2.1 Backbone网络
Backbone网络负责提取图像特征。YOLOv5算法采用改进的CSPDarknet53作为Backbone网络。CSPDarknet53网络由多个残差块组成,每个残差块包含一个卷积层和一个shortcut连接。shortcut连接可以跳过残差块,直接将输入特征传递到输出特征,从而提高网络的训练效率和准确率。
### 2.2.2 Neck网络
Neck网络负责融合不同尺度的特征图。YOLOv5算法采用PAN(Path Aggregation Network)作为Neck网络。PAN网络通过自上而下的路径和自下而上的路径将不同尺度的特征图融合在一起,从而生成具有丰富语义信息的特征图。
### 2.2.3 Head网络
Head网络负责生成目标检测结果。YOLOv5算法采用YOLO Head作为Head网络。YOLO Head网络包含多个卷积层和一个输出层。输出层生成一个预测张量,预测张量包含每个网格单元中目标的类别、位置和置信度。
# 2. YOLOv5算法理论基础
### 2.1 目标检测算法发展历程
目标检测算法经历了从传统方法到深度学习方法的演变。传统方法主要基于手工特征工程,如Haar特征、HOG特征等,但这些特征往往难以泛化到不同的数据集和场景。
深度学习方法的兴起带来了目标检测算法的突破。2012年,R-CNN算法首次将深度卷积神经网络应用于目标检测,取得了显著的性能提升。此后,基于深度学习的目标检测算法不断发展,涌现出Fast R-CNN、Faster R-CNN、SSD、YOLO等一系列算法。
### 2.2 YOLOv5算法的架构和原理
YOLOv5算法是目标检测领域的一大突破,其主要特点是速度快、精度高。YOLOv5算法的架构主要包括Backbone网络、Neck网络和Head网络。
#### 2.2.1 Backbone网络
Backbone网络负责提取图像的特征。YOLOv5算法采用CSPDarknet53作为Backbone网络,该网络由53个卷积层组成,具有较强的特征提取能力。
#### 2.2.2 Neck网络
Neck网络负责将Backbone网络提取的特征融合和增强。YOLOv5算法采用FPN+PAN结构作为Neck网络。FPN(Feature Pyramid Network)通过自上而下和自下而上的连接方式,融合不同尺度的特征。PAN(Path Aggregation Network)进一步增强了特征融合,提高了算法的检测精度。
#### 2.2.3 Head网络
Head网络负责预测目标的位置和类别。YOLOv5算法采用YOLO Head作为Head网络。YOLO Head将输入特征图划分为多个网格,每个网格预测多个候选框和相应的置信度。
### 2.3 YOLOv5算法的损失函数和优化算法
YOLOv5算法采用复合损失函数,包括分类损失、定位损失和置信度损失。分类损失用于衡量预测类别与真实类别的差异,定位损失用于衡量预测边界框与真实边界框的差异,置信度损失用于衡量预测边界框是否包含目标。
YOLOv5算法采用Adam优化算法,该算法具有较快的收敛速度和较好的泛化能力。
# 3. YOLOv5算法实践应用
### 3.1 YOLOv5算法的训练和部署
#### 3.1.1 数据集准备和预处理
YOLOv5算法的训练需要大量标注好的数据集。可以使用公开数据集,如COCO、VOC等,也可以根据实际应用场景自建数据集。
数据集预处理包括图像缩放、裁剪、翻转等操作,目的是增强数据的多样性,提高模型的泛化能力。YOLOv5算法提供了一系列预处理工具,可以方便地进行数据预处理。
#### 3.1.2 训练过程和超参数调优
YOLOv5算法的训练过程包括以下步骤:
1. **加载数据集:**将预处理后的数据集加载到训练器中。
2. **初始化模型:**根据算法架构初始化YOLOv5模型。
3. **定义损失函数和优化器:**选择合适的损失函数和优化器,如交叉熵损失函数和Adam优化器。
4. **训练模型:**迭代训练模型,更新模型权重。
5. **评估模型:**使用验证集评估模型的性能,包括精度、召回率等指标。
超参数调优是训练过程中至关重要的一步。超参数包括学习率、批大小、正则化系数等。通过调整超参数,可以优化模型的性能。
#### 3.1.3 模型部署和推理
训练完成后,需要将模型部署到实际应用场景中。YOLOv5算法提供了多种部署方式,包括:
* **ONNX:**将模型转换为ONNX格式,可以在各种平台上部署。
* **TensorRT:**使用NVIDIA TensorRT优化模型,提高推理速度。
* **C++:**将模型编译为C++代码,实现高效推理。
推理过程包括:
1. **加载模型:**将部署后的模型加载到推理引擎中。
2. **预处理图像:**对输入图像进行预处理,如缩放、裁剪等。
3. **推理:**使用模型对图像进行目标检测,输出检测结果。
4. **后处理:**对检测结果进行后处理,如过滤低置信度目标等。
### 3.2 YOLOv5算法在不同场景中的应用
YOLOv5算法具有广泛的应用场景,包括:
#### 3.2.1 图像目标检测
YOLOv5算法可以用于图像目标检测,识别图像中的目标及其位置。应用场景包括:
* **安防监控:**检测视频中的可疑行为或人员。
* **医疗影像:**检测X光片或CT图像中的病灶。
* **工业检测:**检测产品缺陷或异常。
#### 3.2.2 视频目标检测
YOLOv5算法可以用于视频目标检测,识别视频中目标及其位置。应用场景包括:
* **视频监控:**检测视频中的可疑行为或人员。
* **交通管理:**检测交通违法行为或交通拥堵。
* **体育分析:**检测运动员的动作或比赛结果。
#### 3.2.3 实时目标检测
YOLOv5算法可以用于实时目标检测,识别实时视频或图像中的目标及其位置。应用场景包括:
* **自动驾驶:**检测道路上的行人、车辆和其他障碍物。
* **人脸识别:**检测人脸并进行身份验证。
* **增强现实:**在现实场景中叠加虚拟信息。
# 4. YOLOv5算法进阶研究
### 4.1 YOLOv5算法的改进和优化
#### 4.1.1 模型压缩和加速
**模型压缩**
* **知识蒸馏:**将大型预训练模型的知识转移到较小的学生模型中,以实现性能接近而模型大小更小的效果。
* **剪枝:**移除模型中不重要的权重和神经元,以减少模型大小和计算量。
* **量化:**将浮点权重和激活函数转换为低精度数据类型(如int8),以减少模型大小和内存消耗。
**模型加速**
* **并行计算:**利用多核CPU或GPU并行执行模型计算,以提高推理速度。
* **优化算子:**针对特定硬件平台优化模型中的算子,以提高计算效率。
* **轻量级网络结构:**设计轻量级的网络架构,如MobileNetV2和ShuffleNetV2,以降低计算复杂度和内存占用。
#### 4.1.2 鲁棒性和泛化能力提升
**鲁棒性**
* **数据增强:**通过随机裁剪、旋转、翻转等数据增强技术,提高模型对输入图像的鲁棒性。
* **对抗训练:**使用对抗样本训练模型,增强其对对抗扰动的鲁棒性。
* **正则化:**使用L1/L2正则化或Dropout等正则化技术,防止模型过拟合。
**泛化能力**
* **迁移学习:**在预训练模型的基础上进行微调,以适应新的数据集和任务。
* **多任务学习:**同时训练模型执行多个任务,以提高泛化能力。
* **自适应训练:**根据训练数据的分布动态调整训练过程,以提高模型对不同数据分布的泛化能力。
### 4.2 YOLOv5算法的创新应用
#### 4.2.1 目标跟踪
* **基于YOLOv5的Siamese网络:**使用Siamese网络结构,通过对比目标和搜索区域的特征来进行目标跟踪。
* **YOLOv5与Kalman滤波器结合:**将YOLOv5用于目标检测,并使用Kalman滤波器预测目标的运动轨迹。
* **YOLOv5与SORT算法结合:**使用YOLOv5进行目标检测,并使用SORT算法进行目标关联和跟踪。
#### 4.2.2 实例分割
* **YOLOv5与Mask R-CNN结合:**将YOLOv5用于目标检测,并使用Mask R-CNN进行实例分割。
* **YOLOv5与FCN结合:**将YOLOv5用于目标检测,并使用FCN进行语义分割,从而实现实例分割。
* **YOLOv5与U-Net结合:**将YOLOv5用于目标检测,并使用U-Net进行语义分割,从而实现实例分割。
#### 4.2.3 3D目标检测
* **YOLOv5与PointNet结合:**将YOLOv5用于2D目标检测,并使用PointNet进行3D目标检测。
* **YOLOv5与VoxelNet结合:**将YOLOv5用于2D目标检测,并使用VoxelNet进行3D目标检测。
* **YOLOv5与Frustum PointNet结合:**将YOLOv5用于2D目标检测,并使用Frustum PointNet进行3D目标检测。
# 5. YOLOv5算法未来发展展望
YOLOv5算法作为目标检测领域的重要里程碑,未来发展前景广阔,主要体现在以下几个方面:
### 5.1 性能提升
随着硬件和算法的不断发展,YOLOv5算法的性能有望进一步提升。通过优化模型结构、引入新的训练方法和损失函数,可以提高算法的精度和速度。
### 5.2 多模态融合
目前,YOLOv5算法主要用于图像和视频目标检测。未来,算法可以融合多模态数据,例如点云和雷达数据,实现更加全面的目标检测和理解。
### 5.3 泛化能力增强
YOLOv5算法在不同场景中的泛化能力仍有待提升。未来,通过引入域自适应和元学习等技术,可以提高算法对新数据集和复杂场景的适应性。
### 5.4 创新应用
YOLOv5算法的创新应用潜力巨大。除了目标检测之外,算法可以扩展到目标跟踪、实例分割和3D目标检测等领域,为计算机视觉和人工智能应用提供新的可能性。
### 5.5 算法轻量化
随着边缘计算和物联网设备的普及,对轻量级目标检测算法的需求不断增加。未来,YOLOv5算法可以进一步轻量化,以满足低功耗和低延迟应用的需求。
0
0
相关推荐
专栏简介
《Yolov5简介与应用解析》专栏深入探讨了Yolov5目标检测算法的原理、应用场景、优化技巧、数据预处理、模型评估、部署和推理优化等各个方面。专栏还涵盖了Yolov5的网络架构演进、版本升级、数据集构建、多目标检测、目标分类与检测的区别、在自动驾驶中的应用、过拟合与欠拟合问题、实时性与精度权衡、标签平滑技术、注意力机制、小目标检测优化、多尺度特征融合、样本均衡技术、网络蒸馏方法、目标跟踪融合、卷积层剪枝优化、梯度累积训练策略、样本增强技术和网络宽度与深度优化等前沿技术。通过对Yolov5的全面解析,本专栏为读者提供了全面的理论知识和实践指导,助力读者深入理解和应用Yolov5算法,解决实际目标检测问题。
专栏目录
最低0.47元/天 解锁专栏
VIP年卡限时特惠
 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
最新推荐
遗传算法未来发展趋势展望与展示

# 1.1 遗传算法简介
遗传算法(GA)是一种受进化论启发的优化算法,它模拟自然选择和遗传过程,以解决复杂优化问题。GA 的基本原理包括:
* **种群:**一组候选解决方案,称为染色体。
* **适应度函数:**评估每个染色体的质量的函数。
* **选择:**根据适应度选择较好的染色体进行繁殖。
* **交叉:**将两个染色体的一部分交换,产生新的染色体。
* **变异:**随机改变染色体,引入多样性。
高级正则表达式技巧在日志分析与过滤中的运用

# 1. 高级正则表达式概述**
高级正则表达式是正则表达式标准中更高级的功能,它提供了强大的模式匹配和文本处理能力。这些功能包括分组、捕获、贪婪和懒惰匹配、回溯和性能优化。通过掌握这些高
Spring WebSockets实现实时通信的技术解决方案
# 1. 实时通信技术概述**
实时通信技术是一种允许应用程序在用户之间进行即时双向通信的技术。它通过在客户端和服务器之间建立持久连接来实现,从而允许实时交换消息、数据和事件。实时通信技术广泛应用于各种场景,如即时消息、在线游戏、协作工具和金融交易。
# 2. Spring WebSockets基础
### 2.1 Spring WebSockets框架简介
Spring WebSocke
Selenium与人工智能结合:图像识别自动化测试
# 1. Selenium简介**
Selenium是一个用于Web应用程序自动化的开源测试框架。它支持多种编程语言,包括Java、Python、C#和Ruby。Selenium通过模拟用户交互来工作,例如单击按钮、输入文本和验证元素的存在。
Selenium提供了一系列功能,包括:
* **浏览器支持:**支持所有主要浏览器,包括Chrome、Firefox、Edge和Safari。
* **语言绑定:**支持多种编程语言,使开发人员可以轻松集成Selenium到他们的项目中。
* **元素定位:**提供多种元素定位策略,包括ID、名称、CSS选择器和XPath。
* **断言:**允
实现实时机器学习系统:Kafka与TensorFlow集成
# 1. 机器学习系统概述**
机器学习系统是一种能够从数据中学习并做出预测的计算机系统。它利用算法和统计模型来识别模式、做出决策并预测未来事件。机器学习系统广泛应用于各种领域,包括计算机视觉、自然语言处理和预测分析。
机器学习系统通常包括以下组件:
* **数据采集和预处理:**收集和准备数据以用于训练和推理。
* **模型训练:**使用数据训练机器学习模型,使其能够识别模式和做出预测。
*
adb命令实战:备份与还原应用设置及数据

# 1. adb命令简介和安装
### 1.1 adb命令简介
adb(Android Debug Bridge)是一个命令行工具,用于与连接到计算机的Android设备进行通信。它允许开发者调试、
TensorFlow 时间序列分析实践:预测与模式识别任务
# 2.1 时间序列数据特性
时间序列数据是按时间顺序排列的数据点序列,具有以下特性:
- **平稳性:** 时间序列数据的均值和方差在一段时间内保持相对稳定。
- **自相关性:** 时间序列中的数据点之间存在相关性,相邻数据点之间的相关性通常较高。
# 2. 时间序列预测基础
### 2.1 时间序列数据特性
时间序列数据是指在时间轴上按时间顺序排列的数据。它具
ffmpeg优化与性能调优的实用技巧
# 1. ffmpeg概述
ffmpeg是一个强大的多媒体框架,用于视频和音频处理。它提供了一系列命令行工具,用于转码、流式传输、编辑和分析多媒体文件。ffmpe
TensorFlow 在大规模数据处理中的优化方案

# 1. TensorFlow简介**
TensorFlow是一个开源机器学习库,由谷歌开发。它提供了一系列工具和API,用于构建和训练深度学习模型。TensorFlow以其高性能、可扩展性和灵活性而闻名,使其成为大规模数据处理的理想选择。
TensorFlow使用数据流图来表示计算,其中节点表示操作,边表示数据流。这种图表示使TensorFlow能够有效地优化计算,并支持分布式
numpy中数据安全与隐私保护探索
# 1. Numpy数据安全概述**
数据安全是保护数据免受未经授权的访问、使用、披露、破坏、修改或销毁的关键。对于像Numpy这样的科学计算库来说,数据安全至关重要,因为它处理着大量的敏感数据,例如医疗记录、财务信息和研究数据。
本章概述了Numpy数据安全的概念和重要性,包括数据安全威胁、数据安全目标和Numpy数据安全最佳实践的概述。通过了解这些基础知识,我们可以为后续章节中更深入的讨论奠定基础。
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
VIP年卡限时特惠
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )